Next week-end, a local free and open-source software conference called Capitole du Libre will take place in Toulouse, France, where Bootlin has one of its offices. Bootlin will participate to this event in several ways:
Bootlin is among the Bronze partners, supporting financially the event
Bootlin engineer Maxime Chevallier will give a talk about Networking under Linux, in which he will give an introduction to the Linux kernel networking stack.
We encourage free software developers and users from the south west of France to join this event, which has been organized for several years, and provides a very nice selection of talks and tutorials. And of course, this conference is entirely free, and no registration is required.
The Embedded Linux Conference Europe edition 2018 took place a few weeks ago in Edinburgh, Scotland, and no less than 9 engineers from Bootlin attended the conference. While our previous blog post shared the videos and slides of our talks, tutorials and demos, in this blog post we would like to highlight a selection of talks that Bootlin engineers found interesting. We asked each of the 9 engineers who attended the event to pick one talk they liked, and make a small write-up about it. Of course, many other talks were interesting and what makes a talk interesting is very subjective!
Getting Your Patches in Mainline Linux: What Not To Do (and a Few Things You Could Try Instead), by Marc Zyngier
Talk selected by Maxime Ripard
Marc gave a talk on a subject that is often debated, and still confusing to newcomers: how to contribute. He first started by presenting the various actors involved in a contribution: a contributor, a maintainer and a reviewer. He also took the time to explain the various objectives that everyone has which is something that is often overlooked by the other parties and the conferences on this subject. He then went on to explain and document the good practices that can be used in order to contribute to most subsystems. This was overall a great overview, and we definitely recommend it to people willing to start contributing.
Real Time is Coming to Linux; What Does that Mean to You? , by Steven Rostedt
Talk selected by Michael Opdenacker
In this talk about PREEMPT_RT, the speaker, who’s a long time contributor to this feature, was approaching the subject on a new angle, taking for granted that PREEMPT_RT is in mainline Linux. That’s not quite right yet, but this is possible before the next Embedded Linux Conference, in August next year. One proof that this is on the verge of being true is that its authors no longer call it a patch set, but just PREEMPT_RT. Rostedt also added that Linux can now be called a Deterministic Operating System (aka DOS!).
So, Rostedt first explains what PREEMPT_RT is about and how it addresses the challenges of users who are determined to be deterministic (that’s my pun here, not Steven’s).
Doing this, Steven recalled the “Priority inheritance” issue that is best known through the fact that it happened on Mars on the Pathfinder robot. A high priority and critical system process got starved by a lower priority one because an even lower priority process was holding the lock the high priority process was waiting for, causing some system services to be unavailable. This caused a watchdog to kick in and reboot the system endlessly. Such an issue is addressed by “Priority inheritance”, allowing a lock-holding process to inherit the priority of the highest priority process waiting for the lock. Priority inheritance is now supported in kernel locks thanks to PREEMPT_RT.
By the way, I learned that there are now 5 preemption models in the kernel, instead of four originally with PREEMPT_RT. There is now a “Basic RT” option in which you have all the PREEMPT_RT features except the sleeping spinlocks, which is useful for debugging such features.
So now that PREEMPT_RT is almost in mainline, what should kernel developers do? The main thing is to stop adding non determinism to Linux. For example, Rostedt strongly advised against rw_locks and semaphores on multiple CPUs. That’s horrible for cache lines, as they do not scale. You should use RCU mechanisms instead.
As a kernel developer, you shouldn’t use preempt_disable() either, unless you know it is done for a very short amount of time. Similarly, if you find code that uses local_irq_save(), that’s most likely a bug. Instead, people should use spin_lock_irqsave() and spin_lock_irq(), which disable interrupts only when PREEMPT_RT is not enabled.
Rostedt ended his talk by answering a question about what will remain of the PREEMPT_RT patch set. Even when the most important parts of PREEMPT_RT are in mainline, some changesets are likely to remain for some time, just to address cases that don’t have a solution yet. 99.9% of the users will be able to do without it. That’s what a mainline solution means: no patches to apply.
Uh-oh, It’s I/O Ordering! by Will Deacon
Talk selected by Miquèl Raynal
Will gave his second talk at an ELCE about I/O ordering, 6 years after the first talk on that subject. For this purpose, he started with an introduction to the memory consistency models (in 5 minutes!) to show the audience how a very simple program, ran on two CPUs, could produce very strange results due to store buffering. Because his assumption was a bit hard to believe for such a simple program, he proved us he was right by actually running it on his laptop. While such kind of tricky behavior applies to memory, the same odd situation may happen with I/Os! After a theoretical explanation, he gave a few examples (mostly taken from the mainline Linux kernel) of good and bad code sections and explained why. If you are a device driver writer, this talk should be of interest! The examples are real use cases that you might encounter someday (if not already) and knowing how to workaround the most generic caveats with the right memory barrier or even doing a dummy read to enforce ordering is something you will want to master to avoid strange random bugs.
Sebastian started the talk by presenting what this subsystem is used for and its history, which he knows in great length since he took over the maintainership of the power supply subsystem in the Linux kernel in 2014. While it’s not the subsystem with the hardest concepts to grasp, Sebastian explained that he aimed, with his talk, at providing an accessible approach to the subsystem for people who’re trying to get started in the Linux kernel or in this specific subsystem. Having contributed to this subsystem a few patches and drivers in my early days as a kernel developer, I can say that I wish I had seen his talk before to quicken my understanding of the power supply subsystem. Scrolling down the slides, he presented a very simple example of a dummy driver, Device Tree nodes and how to configure what’s exposed to sysfs. Sebastian also gave a few words on Open-Circuit Voltage in batteries which is interesting for getting more precise values of the battery capacity depending on its age and temperature, and the ongoing work on supporting this in the kernel. He concluded with the future plans for the subsystem, which are mainly related to batteries, their fuel gauges and chargers.
Arnd gave an update on the status of the effort to get a 32-bit kernel handle the 32-bit time_t overflow which will happen in January 2038. He first started to explain why this is necessary. This boils down to the huge number of 32-bit products that are still being introduced on the market with some of them having a very long service life. Arnd said this work has been on-going since 2014, when John Stultz switched the internal timekeeping code to a 64-bit second counter. The device drivers then needed fixing. This was done by addressing them individually by changing:
time* to ktime_t
time* to jiffies
time_t to time64_t
timespec/timeval to timespec64
CLOCK_REALTIME to CLOCK_MONOTONIC
The driver userspace interface also needed to be changed. Some IOCTLs were easy to change because they are already using different numbers depending on the size of the argument they take. The other IOCTLs had to be redefined. It gets worse Arnd said, explaining how the read, write and mmap callbacks are getting fixed.
While the VFS layer got fixed earlier this year, some filesystems are still work in progress and other ones are not fixable because they use a 32-bit time on disk. The only way is to move away from those.
Arnd then went over the biggest remaining part of the work, the system calls. The 32-bit compat syscalls mechanism is reused and a __kernel_timespec type has been introduced to handle time at the boundary. He then listed the affected system calls and their current status.
He ended by talking about userspace and the plan to handle the issue in glibc. Finally, he mentioned what distributions will have to do.
On this Rock I will Build my System – Why Open-Source Firmware Matters, by Lucas Stach
Talk selected by Grégory Clement
Lucas started to present what we used to have in embedded world: a minimalist firmware which acts only as a bootloader and with no interaction with the kernel.
Then he showed why with the virtualization there were some needs to have CPU power management in a single place. This was defined by the PSCI: the purpose of it was to have the bare-metal and the virtualized kernel seeing the same interface. What should have been a simple and delimited interface then became more and more complex due to the hardware constraints. Indeed, in many SoCs multiples devices or CPUs can share the same register. Besides, an interface such as the I2C used by a PMIC can also be shared. This lead to moving the entire register inside the firmware or to have lock mechanisms between the kernel and the firmware. In conclusion, the kernel implementation became easier but at the expense of a complex firmware.
The sad news, is that most of the firmwares are not copyleft which can lead to closed source binaries, making the debugging very difficult for the kernel. Even if the firmware remains open source, having the hardware management split in two parts, makes the debugging more complex. However, there is nothing we can do about it, because there are valid reasons to have a firmware. The only thing we should be vigilant about is the openness of the firmware source.
Handling Security Flaws in an Open Source Project, by Jeremy Allison
Talk selected by Antoine Ténart
Samba is a well known re-implementation of the SMB protocol and as such is used in several consumer devices — such as NAS. As open source software are more and more used in new products, correctly handling security flaws and their fixes is becoming an important topic.
Jeremy Allison, one of the core developers of Samba, gave a talk about how Samba is dealing with security issues and what questions other projects should ask themselves to handle those the right way. He talked about the process to put in place to take security seriously, how to respond to vulnerability reporters and to security issues, and how to notify downstream vendors so that products in the wild are patched before the CVE is made public.
Jeremy Allison also presented three examples of security flaws in Samba. He described how they were handled at the time, the difficulties the Samba developers encountered, and gave a postmortem.
Security is important and we found this talk to be a must-see for open source maintainers and developers, as it gave a good insight on how to properly handle security vulnerabilities in a project. One of the key points was how to coordinate the security responses to avoid having the users being at risk.
Improve Linux User-Space Core Libraries with Restartable Sequences, by Mathieu Desnoyers
Talk selected by Maxime Chevallier
Following-up on the good LWN coverage of the restartable sequences, Mathieu Desnoyers gave an interesting talk on the current userspace support, and some feedback regarding the shortcomings of the current implementation.
Restartable sequences allow to implement lockless per-cpu sections of code, that will be automatically aborted (or restarted) whenever migration, preemption or signal delivery occurs before the final “commit” operation is done.
This is useful to read some performance counters from userspace with a minimal overhead since there’s no lock involved to protect the critical section.
Mathieu explained that these critical sections need to be written in assembly code, but thanks to the librseq and its set of macros, users shouldn’t have to worry about this.
Mathieu then presented some of the shortcomings of rseqs, one of them being that they can’t be debugged in step-by-step (since a signal interrupts the sequence, causing it to abort). To solve these shortcomings, Mathieu gave a quick glimpse of a possible new system-call, cpu_opv(), that would allow users to execute a limited sequence of instructions with preemption and migration disabled.
Power Debugging with JTAG, by Patrick Titiano & Alexandre Bailon, Baylibre
Talk selected by Thomas Petazzoni
In this talk, BayLibre engineers Patrick Titiano and Alexandre Bailon introduced libSoCCA (SoC Continuous Analyzer), a Python library that allows to watch over JTAG what a SoC is doing.
This library allows remote access to the registers of a SoC through JTAG, and uses the SoC interconnect debug port rather than the CPU debug port. Non-intrusive observation of what the SoC is doing is thus possible, even when the CPU is idle or in a low-power state.
libSoCCA uses SVD (System View Description) files, which are XML files that describe all the registers of the SoC, their bitfields and possible values. This format is not specific to libSoCCA, since it is already used by Keil, and apparently some SoC vendors provide such SVD files for their SoCs. Unfortunately, not all vendors do this, and creating such SVD files from the SoC datasheet is a very long and boring process. In addition, the speakers pointed out that the SVD file format lacked an include directive, which would be very useful to share register definitions between SoC.
With the information provided by the SVD files and a connection to the target over JTAG that uses OpenOCD, libSoCCA is then used to implement a number of different
tools:
PMUGraph, which shows power management statistics of the device. Compared to solution such as perf or powertop, this solution has the advantage of being non-intrusive.
memtool, which provides a way of manipulating registers without having to manually fiddle with register offsets and bitfields. It could be summarized as a remote devmem that knows your SoC registers. This kind of feature can be found in proprietary JTAG tools, and was lacking in the open-source world.
clocktool (development not started yet), which shows the state of the SoC clocks remotely, a bit like clk_summary in debugfs, but which works even when the SoC is idle or in a low power state, which is precisely a moment where getting clock status may be useful for debugging.
Overall, we found libsocca very interesting as it opens up lots of possibilities. It would be useful to have a better file format than SVD to describe SoC registers though, and it would also be nice to have an on-target variant of memtool.
The Embedded Linux Conference Europe edition 2018 took place last week in Edinburgh, Scotland, and no less than 9 engineers from Bootlin attended the conference. In this blog post, we would like to share the slides, materials and videos of the talks, tutorials and demos we gave during this conference.
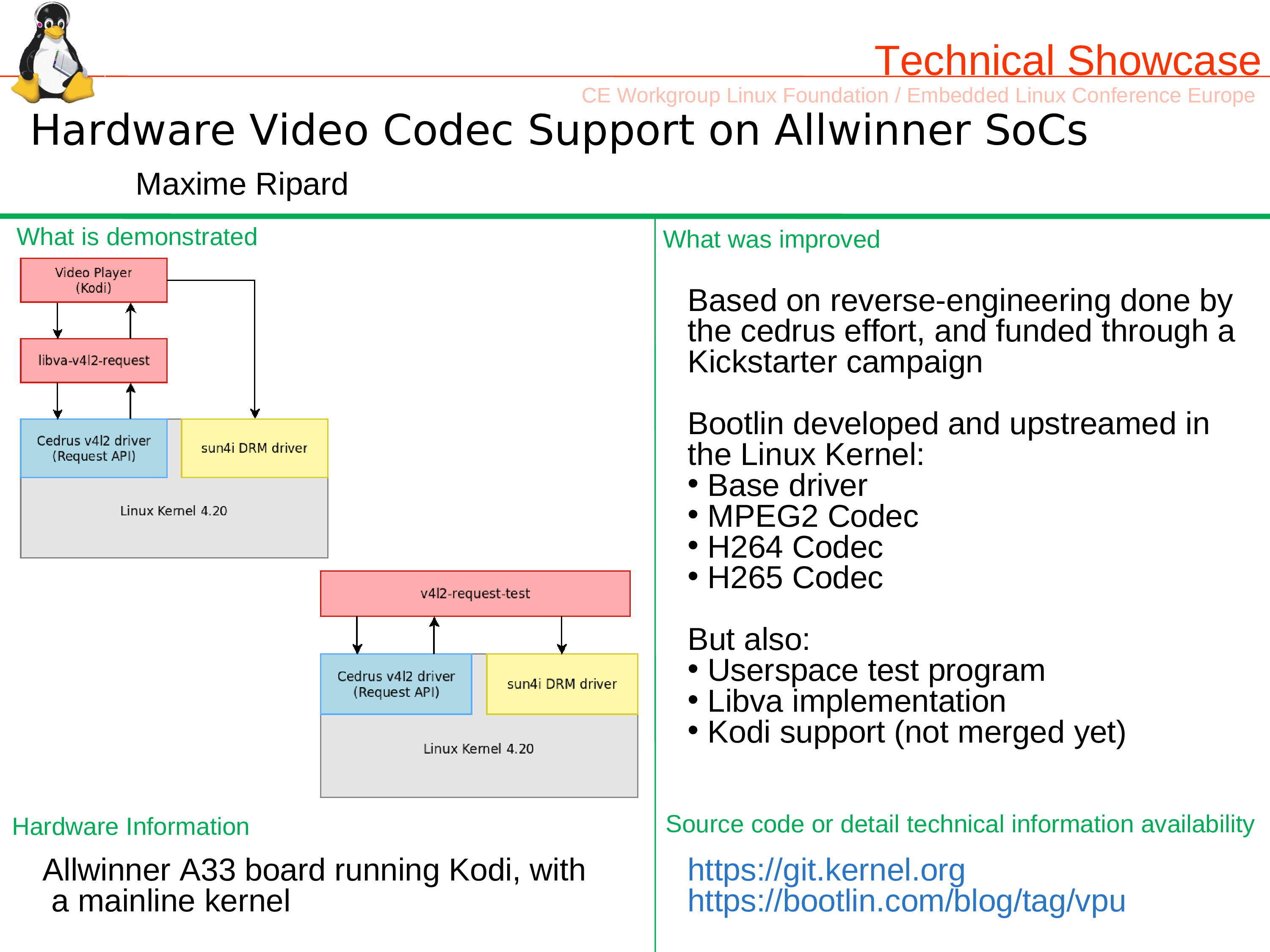
Talk: Supporting Hardware Codecs in a Linux system – Maxime Ripard
This talk was given by Bootlin engineer Maxime Ripard, who has worked since spring 2018 with Paul Kocialkowski on adding support in the upstream Linux kernel for hardware-accelerated video decoding on Allwinner platforms. This project was the topic of the successful crowd-funding campaign we launched in February 2018, and for which we regularly posted updates on our blog.
Talk: Networking: From the Ethernet MAC to the Link Partner – Maxime Chevallier & Antoine Ténart
This talk was given by Bootlin engineers Maxime Chevallier and Antoine Ténart, who shared their knowledge and experience working on enabling network hardware in Linux, trying to clarify how Ethernet MAC and PHYs interact, how PHYs communicate with their link partner, what are the protocols involved, etc.
Talk: SPI Memory support in Linux and U-Boot – Miquèl Raynal
This talk was given by Miquèl Raynal, who has worked with Bootlin engineer Boris Brezillon on adding support for SPI NAND in U-Boot and Linux, as well as improving in general the support for SPI flash memory, see our previous blog post.
The video will be published later, as it was not recorded by the Linux Foundation, but by the E-ALE track organizers.
Demo: Hardware Video Codec Support on Allwinner SoCs – Maxime Ripard
In this demonstration, Maxime Ripard was showing the upstream Linux kernel support for the Allwinner VPU, which provides hardware-accelerated video decoding for MPEG2, H264 and H265 within the Kodi media player on Allwinner platforms.
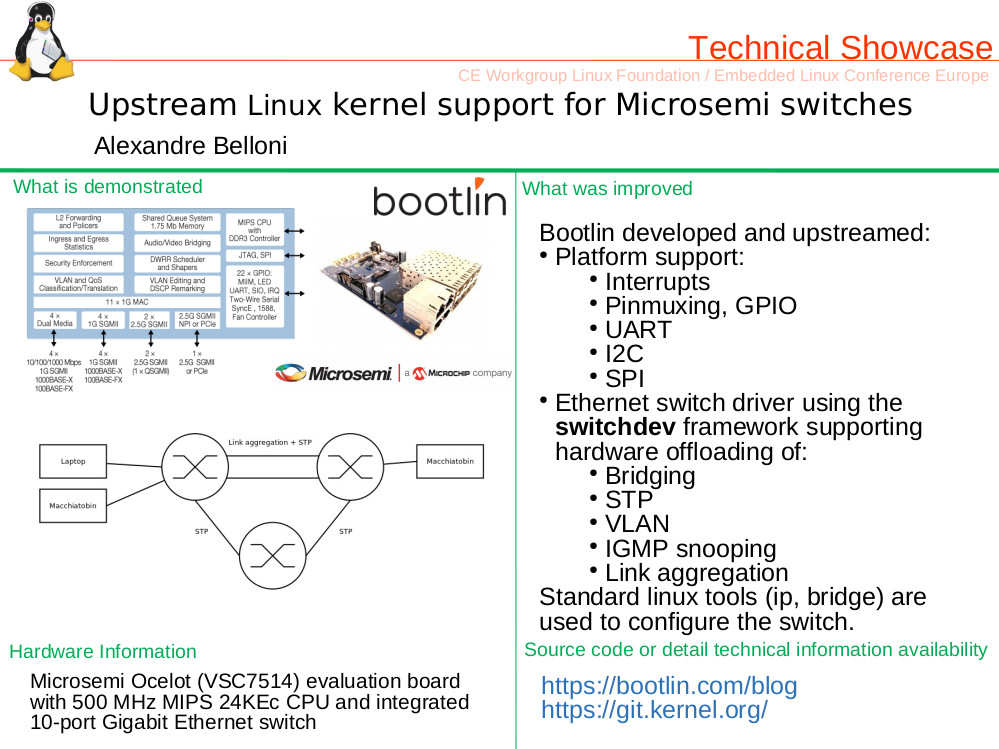
Demo: Upstream Linux kernel support for Microsemi switches – Alexandre Belloni
Alexandre Belloni showing upstream Linux kernel support for Microsemi Ethernet switches at the Embedded Linux Conference Europe 2018
In this demonstration, Bootlin engineer Alexandre Belloni was showing the upstream Linux kernel support for the VSC5713 and VSC7514 Microsemi Ethernet switches, which we presented in a previous blog post. Thanks to this support in upstream Linux, the different ports of the switch are seen as regular Linux network interfaces, and standard Linux user-space tools can be used to bridge the ports, set up VLAN filtering, and more. This makes such switches a lot easier to use than vendor-specific SDKs.
This year’s edition of the X.org Developpers Conference (XDC) happened two weeks ago in A Coruña, Spain. While its name suggests that it might be focused solely on the X.org display server, this conference is actually targeted at the whole Linux graphics stack, including alternative stacks like Android’s or Wayland servers. Following our involvment in the Linux DRM subsystem, and to deepen our understanding and involvement in the graphics stack, Bootlin sent one engineer, Maxime Ripard, maintainer of the sun4i DRM driver.
There’s been a lot of interesting talks during those three days, as you can see in the conference schedule, but we especially liked a few of those:
Jens Owens, Pierre-Loup Griffais – Open Source Driver Development Funding Hooking up the Money Hose – Slides
The opening talk was made by Jens Owens, from Google, and Pierre-Loup Griffais, from Valve. They provided some interesting feedback and insights from two companies with a quite central position in the gaming industry. They also advocated for open source drivers, and the way they were actually helping the game developpers.
Haneen Mohamed and Rodrigo Siqueira were on stage to talk about their work as part of the Google Summer of Code and Outreachy programs to work on a Virtual KMS driver. This driver is still in its early stage, but got merged and while basic at the moment, holds a lot of promises to use it as a KMS backend for testing the KMS API.
Jerome Glisse – getting rid of get_user_page() in favor of HMM – Slides
Jerome Glisse, from Red Hat, came to describe his current work on the memory management subsystem of the Linux kernel. He’s working on dealing with the constraints that the systems using GPUs to offload computations have when it comes to allocating memory in the most efficient way.
Overall, this was a great description about the get_user_page interface pitfalls when used in that context, and from the work that he has been doing for the past years to overcome them.
In that talk, Lyude Paul and Alyssa Rosenzweig were showing the work they did on Panfrost, the reverse-engineering effort around the Mali-T GPUs from ARM (which was then expanded to the Mali-G GPUs). They discussed the result of their findings, explained the architecture of the GPU and then talked about the current state of their work. The final part of the talk was a quick demo of their work on a Rockchip SoC. It provided a great overview of the current state of the driver, and there’s a lot of hope for an open-source driver for that GPU that is quite widely used on ARM.
Elie Tournier – What’s new in the virtual world? – Slides
Elie Tournier, from Collabora, gave a talk about his work and the current state of virgl, which is a virtual 3D GPU meant to be used within qemu virtual machines, while remaining independant of the host GPU. While we were aware of the existence of that driver for quite some time, this talk provided a great overview of the features that are provided by virgl, and what you can and cannot do with it.
Conclusion
After XDC in 2016 in Helsinki, this was our second time attending that conference. Just like the first time, we really enjoyed the single track format where you can meet all the attendees and have side discussions pretty easily. Once again, the talks were great, and lead us to think about interesting developments we could do on our various projects.
The second edition of the Alpine Linux Persistent Storage Summit (ALPSS) happened two weeks ago in the Lizumerhütte Alpine lodge. Close to Innsbruck, Austria, the lodge resides in an amazingly beautiful valley. Completely separated from the rest of the world in Winter, this year edition was marked by the absence of data network access, intensifying the feeling of isolation, stimulating the exchanges between attendees. To strengthen the representation of MTD developers at this event, Bootlin sent two of his engineers: Boris Brezillon and Miquèl Raynal, respectively MTD and NAND maintainers in the Linux kernel.
Picture taken while climbing to the lodge. Author: Hans Holmberg, 2018 (CC-BY-SA)
NVMe, open-channel and zoned namespaces
While almost all the ~30 attendees work on storage support that are based on NAND flashes, a majority work on domains targeting high-performances, where power-cuts are not the issue but the latency and throughput are. Far beyond our embedded world, people are working hard on the parallelization and the standardization of high-speed interfaces (SCSI, NVMe). In the end, we all have to make the software deals with the NAND-specific constraints of the underlying storage device.
Disclaimer: This is a short summary (not exhaustive) of the “high-performance” world talks as we could understand them. This is probably not 100% accurate as the topics discussed are, currently, out of our domain of expertise. Corrections are welcome.
Matias Bjørling (Western Digital) and Christoph Hellwig presented new NVMe commands to manage NVMe zones. While zones need write order to be preserved, the Linux multi-queue block I/O queueing mechanism (blk-mq) cannot enforce this. Bart van Assche (Google) and Damien Le Moal (Western Digital) proposed a draft to reorder writes at the blk-mq layer. While this solution was not very well received, it opened the discussion on how the issue should be addressed. Bart van Assche also presented his work on copy offload mechanism in Linux, which could for instance serve to fast copy entire zones. His work could be also useful to Stephen Bates who works on PCIe peer-to-peer and talked on how he wants to eg. enable DMA between SSDs. Still on the topic of DMA and performances, Idan Burstein (Mellanox) exposed the cutting-edge features he worked on to improve Remote DMA (RDMA) performances.
MTD was also present to the party
Probably the easier part to understand for us, embedded people.
Boris and Miquèl presenting about memories. Author: Brian Pawlowski, 2018 (CC-BY)
Boris Brezillon and Miquèl Raynal gave a talk on their recent work support for SPI memories in Linux (and U-Boot, but this will be more detailed at ELCE in October). Boris wrote a new SPI-NAND layer, converting MTD requests into SPI exchanges, giving the flow of commands to the (also brand new) SPI-mem layer to standardize how to speak with SPI controller drivers from both SPI-NAND and SPI-NOR stacks. Cleaning work is still needed on the SPI-NOR side as well as the addition of new features like direct mapping, XIP (that was discussed after the talk), the addition of support for more chips and the conversion to SPI-mem of more SPI controllers. The slides are available online, see also our previous blog post on this topic.
Richard Weinberger (from Sigma Star GmbH, and co-maintainer of MTD and UBI/UBIFS) updated us about the level of power-cut testing available to challenge the MTD stack. Tracing is possible to get closer to the failing sequence but one big problem is to replay the sequence and reproduce the issue. Tracking down untested code path is very important to keep UBI/UBIFS as reliable as possible: this is what is generally the most important when using SPI/parallel NAND devices.
Richard’s co-worker David Gstir also works on UBI/UBIFS, but on the authentication side. Bringing filesystem authentication to UBIFS could have been simple but during his introduction he disqualified most of the alternatives he had (dm-verity, fs-verity, …). Fun-fact about fs-verity, authentication would have work on the file’s contents, but not on the inodes themselves. Hence, the file’s content could not be changed, but the file itself could still be moved. So, a brand new solution has been implemented for UBIFS, upstreaming ongoing.
Original ideas presented
Benchmarking real hardware was somehow not adapted to Damien Le Moal experiments. He hacked QEMU to add the possibility to tune CPU latency so that he could compare easily the latency on in-memory data processing paths. WIP.
Johannes Thumshirn (SUSE Labs), as a side project, started reversing APFS, Apple’s new filesystem. The firm promised two years ago to release the implementation of its filesystem so that computers running Microsoft or Linux could mount it. So far nothing happened, that is why, without even a Mac in hand, he started spending nights hex-dumping structures from a filesystem image he got, reverse-engineering the content with the help of research papers already produced. The first results are there, he can now ls and cat random files!
And after talks and hiking: time to BOFs
View from the lodge. Author: Brian Pawlowski, 2018 (CC-BY)
A bit before the official BOFs time MTD folks gathered around Hans Holmberg (CNEX Labs) to carefully listen about how pblk works, a “Physical block device” FTL for SSDs supporting open-channel that could give ideas to some of them. Why not an entirely open-source SSD running Linux with its own FTL?
Finally, between all the interesting discussions that happened, we could mention the need for a generic NVMe-oF (NVMe over Fabric) discovery protocol raised by Hannes Reinecke (SUSE Labs), and the possible evolution of the MTD stack to integrate an I/O scheduler to provide much better (and parallelized) performances exposed by Boris Brezillon.
Conclusion
All attendees agreed this format of conference is really pleasant, the surrounding helping a lot to the general wellness and the success of this year’s edition of the ALPSS. We will definitely try to make it next year!
Last year, a number of Bootlin engineers attended the Linux Plumbers conference. This year again, Bootlin will participate to the event, with engineer Antoine Ténart traveling to Vancouver, Canada on November 13-15 for this conference.
The Kernel Recipes conference, to be held in Paris on September 26-28, has become over the years a very popular conference on kernel topics, with its atypical single-track format and limitation to 100 attendees. With this conference taking place in Paris, France, Bootlin engineers obviously never missed the chance to attend, and this year again, several of us will participate to the event.
The Embedded Linux Conference is one of the most important events in the embedded Linux industry, and Bootlin has been participating to this event non-stop since its creation in 2007. So it should be no surprise that we will once again be participating to the 2018 edition of this conference, which will take place on October 22-24 in Edinburgh, Scotland.
Of course, we are not only attending, but also giving a number of talks and tutorials:
Monday 22 October at 11:15, Maxime Ripard is giving a talk Supporting Hardware Codecs in a Linux system, in which he will explain how HW video decoders/encoders are supported in the Video4Linux kernel subsystem, and share his experience working on the Allwinner VPU support in Linux.
Monday 22 October at 12:05, Antoine Ténart and Maxime Chevallier are giving a common talk Networking: From the Ethernet MAC to the Link Partner, in which they will demystify a number of acronyms and technologies used in networking hardware, and detail how Ethernet MAC and PHY are represented and managed in Linux.
Tuesday 23 October at 12:20, Miquèl Raynal is giving a talk SPI Memory support in Linux and U-Boot, in which he will explain how SPI NAND and SPI NOR memories are supported.
Thomas Petazzoni will be giving a tutorial as part of the Embedded Apprentice Linux Engineer track, titled Getting started with Buildroot. This tutorial has not been scheduled yet.
Michael Opdenacker will also be giving a tutorial as part of the Embedded Apprentice Linux Engineer track, titled Introduction to Linux kernel driver programming. This tutorial has not been scheduled yet.
Maxime Chevallier will participate to the Real Time Summit, also on October 25
While Bootlin CEO Michael Opdenacker was in the Embedded Linux Conference Europe Program Commitee for a number of years, he’s been replaced this year by Bootlin CTO Thomas Petazzoni. Bootlin was thus involved in the daunting but very interesting task of reviewing and selecting the talks to compose the program of this year’s event.
This is going to be a very busy week for us, and we are looking forward to attending the great talks proposed by all other speakers, and meeting the embedded Linux community once again!
Bootlin engineer Maxime Ripard will be attending the X.org Developer Conference 2018, from September 26 to September 28 in A Coruña, Spain. This conference is the main event to discuss Linux graphics and display related topics and meet the Linux kernel and userspace developers working in this field.
At Bootlin, Maxime has been involved over the last few years in a number of display related developments:
He is the initial author and the maintainer of the DRM display controller driver for the Allwinner processors, to which he has progressively added numerous features over the years, including parallel RGB support, HDMI support, DSI support and TV-out support, for many different Allwinner platforms.
He has worked on enabling OpenGL support on Allwinner platforms using the open-source kernel driver and the closed-source binary blob provided by ARM, making OpenGL work using a mainline and upstream Linux kernel on Allwinner hardware. As part of this, Maxime designed and upstreamed a Device Tree binding to describe the Mali GPU and maintains sunxi-mali, a fork of the ARM-provided kernel driver for Mali, modified to work with the upstream Linux kernel.
Maxime has been involved in setting up automated testing of the RaspberryPi display subsystem, using the Chamelium platform and the intel-gpu-tools test suite. See our blog post on this topic.
As part of Bootlin’s work on the Linux support for the Allwinner VPU (funded by our crowdfunding campaign earlier this year), Maxime got involved into issues related to feeding the output of the VPU into the display pipeline found on Allwinner platforms.
A group of Linux kernel developers is organizing on September 11-14 the Alpine Linux Persistence and Storage Summit, a meeting of kernel developers to discuss the hot topics in Linux storage and file systems, such as persistent memory, NVMe, multi-pathing, raw or open channel flash and I/O scheduling.
Bootlin engineers Boris Brezillon, who is the co-maintainer of the MTD subsystem in the Linux kernel, and Miquèl Raynal, who is the co-maintainer of the NAND subsystem in the Linux kernel, will be attending this event. Through this participation, Bootlin is supporting the work done by its engineers acting as Linux kernel maintainers: they will have the chance to meet other kernel developers and discuss the current issues and future of storage-related subsystems. After the event, we will be reporting on our blog about the discussions that took place.
 Next week-end, a local free and open-source software conference called Capitole du Libre will take place in Toulouse, France, where Bootlin has one of its offices. Bootlin will participate to this event in several ways:
Next week-end, a local free and open-source software conference called Capitole du Libre will take place in Toulouse, France, where Bootlin has one of its offices. Bootlin will participate to this event in several ways: