The Embedded Linux Conference Europe edition 2018 took place last week in Edinburgh, Scotland, and no less than 9 engineers from Bootlin attended the conference. In this blog post, we would like to share the slides, materials and videos of the talks, tutorials and demos we gave during this conference.
Talk: Supporting Hardware Codecs in a Linux system – Maxime Ripard
This talk was given by Bootlin engineer Maxime Ripard, who has worked since spring 2018 with Paul Kocialkowski on adding support in the upstream Linux kernel for hardware-accelerated video decoding on Allwinner platforms. This project was the topic of the successful crowd-funding campaign we launched in February 2018, and for which we regularly posted updates on our blog.
Talk: Networking: From the Ethernet MAC to the Link Partner – Maxime Chevallier & Antoine Ténart
This talk was given by Bootlin engineers Maxime Chevallier and Antoine Ténart, who shared their knowledge and experience working on enabling network hardware in Linux, trying to clarify how Ethernet MAC and PHYs interact, how PHYs communicate with their link partner, what are the protocols involved, etc.
Talk: SPI Memory support in Linux and U-Boot – Miquèl Raynal
This talk was given by Miquèl Raynal, who has worked with Bootlin engineer Boris Brezillon on adding support for SPI NAND in U-Boot and Linux, as well as improving in general the support for SPI flash memory, see our previous blog post.
The video will be published later, as it was not recorded by the Linux Foundation, but by the E-ALE track organizers.
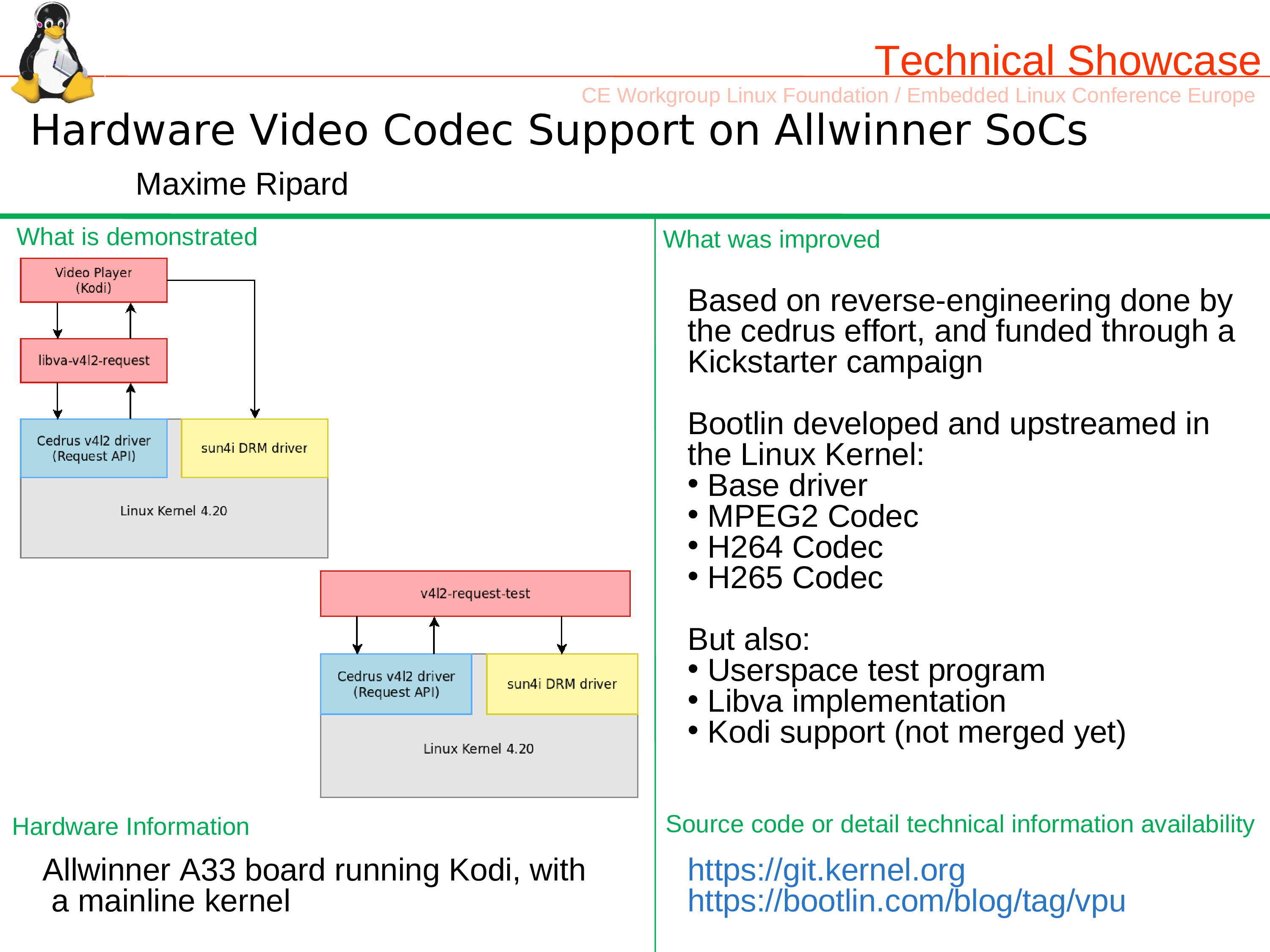
Demo: Hardware Video Codec Support on Allwinner SoCs – Maxime Ripard
In this demonstration, Maxime Ripard was showing the upstream Linux kernel support for the Allwinner VPU, which provides hardware-accelerated video decoding for MPEG2, H264 and H265 within the Kodi media player on Allwinner platforms.
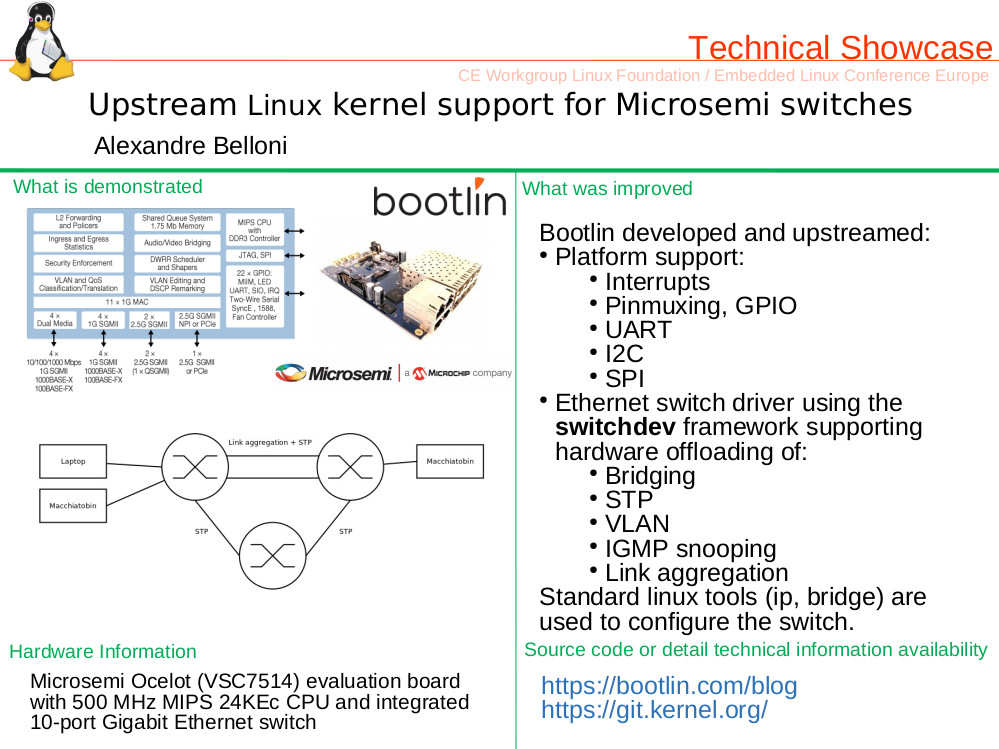
Demo: Upstream Linux kernel support for Microsemi switches – Alexandre Belloni
Alexandre Belloni showing upstream Linux kernel support for Microsemi Ethernet switches at the Embedded Linux Conference Europe 2018
In this demonstration, Bootlin engineer Alexandre Belloni was showing the upstream Linux kernel support for the VSC5713 and VSC7514 Microsemi Ethernet switches, which we presented in a previous blog post. Thanks to this support in upstream Linux, the different ports of the switch are seen as regular Linux network interfaces, and standard Linux user-space tools can be used to bridge the ports, set up VLAN filtering, and more. This makes such switches a lot easier to use than vendor-specific SDKs.
This year’s edition of the X.org Developpers Conference (XDC) happened two weeks ago in A Coruña, Spain. While its name suggests that it might be focused solely on the X.org display server, this conference is actually targeted at the whole Linux graphics stack, including alternative stacks like Android’s or Wayland servers. Following our involvment in the Linux DRM subsystem, and to deepen our understanding and involvement in the graphics stack, Bootlin sent one engineer, Maxime Ripard, maintainer of the sun4i DRM driver.
There’s been a lot of interesting talks during those three days, as you can see in the conference schedule, but we especially liked a few of those:
Jens Owens, Pierre-Loup Griffais – Open Source Driver Development Funding Hooking up the Money Hose – Slides
The opening talk was made by Jens Owens, from Google, and Pierre-Loup Griffais, from Valve. They provided some interesting feedback and insights from two companies with a quite central position in the gaming industry. They also advocated for open source drivers, and the way they were actually helping the game developpers.
Haneen Mohamed and Rodrigo Siqueira were on stage to talk about their work as part of the Google Summer of Code and Outreachy programs to work on a Virtual KMS driver. This driver is still in its early stage, but got merged and while basic at the moment, holds a lot of promises to use it as a KMS backend for testing the KMS API.
Jerome Glisse – getting rid of get_user_page() in favor of HMM – Slides
Jerome Glisse, from Red Hat, came to describe his current work on the memory management subsystem of the Linux kernel. He’s working on dealing with the constraints that the systems using GPUs to offload computations have when it comes to allocating memory in the most efficient way.
Overall, this was a great description about the get_user_page interface pitfalls when used in that context, and from the work that he has been doing for the past years to overcome them.
In that talk, Lyude Paul and Alyssa Rosenzweig were showing the work they did on Panfrost, the reverse-engineering effort around the Mali-T GPUs from ARM (which was then expanded to the Mali-G GPUs). They discussed the result of their findings, explained the architecture of the GPU and then talked about the current state of their work. The final part of the talk was a quick demo of their work on a Rockchip SoC. It provided a great overview of the current state of the driver, and there’s a lot of hope for an open-source driver for that GPU that is quite widely used on ARM.
Elie Tournier – What’s new in the virtual world? – Slides
Elie Tournier, from Collabora, gave a talk about his work and the current state of virgl, which is a virtual 3D GPU meant to be used within qemu virtual machines, while remaining independant of the host GPU. While we were aware of the existence of that driver for quite some time, this talk provided a great overview of the features that are provided by virgl, and what you can and cannot do with it.
Conclusion
After XDC in 2016 in Helsinki, this was our second time attending that conference. Just like the first time, we really enjoyed the single track format where you can meet all the attendees and have side discussions pretty easily. Once again, the talks were great, and lead us to think about interesting developments we could do on our various projects.
The second edition of the Alpine Linux Persistent Storage Summit (ALPSS) happened two weeks ago in the Lizumerhütte Alpine lodge. Close to Innsbruck, Austria, the lodge resides in an amazingly beautiful valley. Completely separated from the rest of the world in Winter, this year edition was marked by the absence of data network access, intensifying the feeling of isolation, stimulating the exchanges between attendees. To strengthen the representation of MTD developers at this event, Bootlin sent two of his engineers: Boris Brezillon and Miquèl Raynal, respectively MTD and NAND maintainers in the Linux kernel.
Picture taken while climbing to the lodge. Author: Hans Holmberg, 2018 (CC-BY-SA)
NVMe, open-channel and zoned namespaces
While almost all the ~30 attendees work on storage support that are based on NAND flashes, a majority work on domains targeting high-performances, where power-cuts are not the issue but the latency and throughput are. Far beyond our embedded world, people are working hard on the parallelization and the standardization of high-speed interfaces (SCSI, NVMe). In the end, we all have to make the software deals with the NAND-specific constraints of the underlying storage device.
Disclaimer: This is a short summary (not exhaustive) of the “high-performance” world talks as we could understand them. This is probably not 100% accurate as the topics discussed are, currently, out of our domain of expertise. Corrections are welcome.
Matias Bjørling (Western Digital) and Christoph Hellwig presented new NVMe commands to manage NVMe zones. While zones need write order to be preserved, the Linux multi-queue block I/O queueing mechanism (blk-mq) cannot enforce this. Bart van Assche (Google) and Damien Le Moal (Western Digital) proposed a draft to reorder writes at the blk-mq layer. While this solution was not very well received, it opened the discussion on how the issue should be addressed. Bart van Assche also presented his work on copy offload mechanism in Linux, which could for instance serve to fast copy entire zones. His work could be also useful to Stephen Bates who works on PCIe peer-to-peer and talked on how he wants to eg. enable DMA between SSDs. Still on the topic of DMA and performances, Idan Burstein (Mellanox) exposed the cutting-edge features he worked on to improve Remote DMA (RDMA) performances.
MTD was also present to the party
Probably the easier part to understand for us, embedded people.
Boris and Miquèl presenting about memories. Author: Brian Pawlowski, 2018 (CC-BY)
Boris Brezillon and Miquèl Raynal gave a talk on their recent work support for SPI memories in Linux (and U-Boot, but this will be more detailed at ELCE in October). Boris wrote a new SPI-NAND layer, converting MTD requests into SPI exchanges, giving the flow of commands to the (also brand new) SPI-mem layer to standardize how to speak with SPI controller drivers from both SPI-NAND and SPI-NOR stacks. Cleaning work is still needed on the SPI-NOR side as well as the addition of new features like direct mapping, XIP (that was discussed after the talk), the addition of support for more chips and the conversion to SPI-mem of more SPI controllers. The slides are available online, see also our previous blog post on this topic.
Richard Weinberger (from Sigma Star GmbH, and co-maintainer of MTD and UBI/UBIFS) updated us about the level of power-cut testing available to challenge the MTD stack. Tracing is possible to get closer to the failing sequence but one big problem is to replay the sequence and reproduce the issue. Tracking down untested code path is very important to keep UBI/UBIFS as reliable as possible: this is what is generally the most important when using SPI/parallel NAND devices.
Richard’s co-worker David Gstir also works on UBI/UBIFS, but on the authentication side. Bringing filesystem authentication to UBIFS could have been simple but during his introduction he disqualified most of the alternatives he had (dm-verity, fs-verity, …). Fun-fact about fs-verity, authentication would have work on the file’s contents, but not on the inodes themselves. Hence, the file’s content could not be changed, but the file itself could still be moved. So, a brand new solution has been implemented for UBIFS, upstreaming ongoing.
Original ideas presented
Benchmarking real hardware was somehow not adapted to Damien Le Moal experiments. He hacked QEMU to add the possibility to tune CPU latency so that he could compare easily the latency on in-memory data processing paths. WIP.
Johannes Thumshirn (SUSE Labs), as a side project, started reversing APFS, Apple’s new filesystem. The firm promised two years ago to release the implementation of its filesystem so that computers running Microsoft or Linux could mount it. So far nothing happened, that is why, without even a Mac in hand, he started spending nights hex-dumping structures from a filesystem image he got, reverse-engineering the content with the help of research papers already produced. The first results are there, he can now ls and cat random files!
And after talks and hiking: time to BOFs
View from the lodge. Author: Brian Pawlowski, 2018 (CC-BY)
A bit before the official BOFs time MTD folks gathered around Hans Holmberg (CNEX Labs) to carefully listen about how pblk works, a “Physical block device” FTL for SSDs supporting open-channel that could give ideas to some of them. Why not an entirely open-source SSD running Linux with its own FTL?
Finally, between all the interesting discussions that happened, we could mention the need for a generic NVMe-oF (NVMe over Fabric) discovery protocol raised by Hannes Reinecke (SUSE Labs), and the possible evolution of the MTD stack to integrate an I/O scheduler to provide much better (and parallelized) performances exposed by Boris Brezillon.
Conclusion
All attendees agreed this format of conference is really pleasant, the surrounding helping a lot to the general wellness and the success of this year’s edition of the ALPSS. We will definitely try to make it next year!
Last year, a number of Bootlin engineers attended the Linux Plumbers conference. This year again, Bootlin will participate to the event, with engineer Antoine Ténart traveling to Vancouver, Canada on November 13-15 for this conference.
The Kernel Recipes conference, to be held in Paris on September 26-28, has become over the years a very popular conference on kernel topics, with its atypical single-track format and limitation to 100 attendees. With this conference taking place in Paris, France, Bootlin engineers obviously never missed the chance to attend, and this year again, several of us will participate to the event.
The Embedded Linux Conference is one of the most important events in the embedded Linux industry, and Bootlin has been participating to this event non-stop since its creation in 2007. So it should be no surprise that we will once again be participating to the 2018 edition of this conference, which will take place on October 22-24 in Edinburgh, Scotland.
Of course, we are not only attending, but also giving a number of talks and tutorials:
Monday 22 October at 11:15, Maxime Ripard is giving a talk Supporting Hardware Codecs in a Linux system, in which he will explain how HW video decoders/encoders are supported in the Video4Linux kernel subsystem, and share his experience working on the Allwinner VPU support in Linux.
Monday 22 October at 12:05, Antoine Ténart and Maxime Chevallier are giving a common talk Networking: From the Ethernet MAC to the Link Partner, in which they will demystify a number of acronyms and technologies used in networking hardware, and detail how Ethernet MAC and PHY are represented and managed in Linux.
Tuesday 23 October at 12:20, Miquèl Raynal is giving a talk SPI Memory support in Linux and U-Boot, in which he will explain how SPI NAND and SPI NOR memories are supported.
Thomas Petazzoni will be giving a tutorial as part of the Embedded Apprentice Linux Engineer track, titled Getting started with Buildroot. This tutorial has not been scheduled yet.
Michael Opdenacker will also be giving a tutorial as part of the Embedded Apprentice Linux Engineer track, titled Introduction to Linux kernel driver programming. This tutorial has not been scheduled yet.
Maxime Chevallier will participate to the Real Time Summit, also on October 25
While Bootlin CEO Michael Opdenacker was in the Embedded Linux Conference Europe Program Commitee for a number of years, he’s been replaced this year by Bootlin CTO Thomas Petazzoni. Bootlin was thus involved in the daunting but very interesting task of reviewing and selecting the talks to compose the program of this year’s event.
This is going to be a very busy week for us, and we are looking forward to attending the great talks proposed by all other speakers, and meeting the embedded Linux community once again!
Bootlin engineer Maxime Ripard will be attending the X.org Developer Conference 2018, from September 26 to September 28 in A Coruña, Spain. This conference is the main event to discuss Linux graphics and display related topics and meet the Linux kernel and userspace developers working in this field.
At Bootlin, Maxime has been involved over the last few years in a number of display related developments:
He is the initial author and the maintainer of the DRM display controller driver for the Allwinner processors, to which he has progressively added numerous features over the years, including parallel RGB support, HDMI support, DSI support and TV-out support, for many different Allwinner platforms.
He has worked on enabling OpenGL support on Allwinner platforms using the open-source kernel driver and the closed-source binary blob provided by ARM, making OpenGL work using a mainline and upstream Linux kernel on Allwinner hardware. As part of this, Maxime designed and upstreamed a Device Tree binding to describe the Mali GPU and maintains sunxi-mali, a fork of the ARM-provided kernel driver for Mali, modified to work with the upstream Linux kernel.
Maxime has been involved in setting up automated testing of the RaspberryPi display subsystem, using the Chamelium platform and the intel-gpu-tools test suite. See our blog post on this topic.
As part of Bootlin’s work on the Linux support for the Allwinner VPU (funded by our crowdfunding campaign earlier this year), Maxime got involved into issues related to feeding the output of the VPU into the display pipeline found on Allwinner platforms.
A group of Linux kernel developers is organizing on September 11-14 the Alpine Linux Persistence and Storage Summit, a meeting of kernel developers to discuss the hot topics in Linux storage and file systems, such as persistent memory, NVMe, multi-pathing, raw or open channel flash and I/O scheduling.
Bootlin engineers Boris Brezillon, who is the co-maintainer of the MTD subsystem in the Linux kernel, and Miquèl Raynal, who is the co-maintainer of the NAND subsystem in the Linux kernel, will be attending this event. Through this participation, Bootlin is supporting the work done by its engineers acting as Linux kernel maintainers: they will have the chance to meet other kernel developers and discuss the current issues and future of storage-related subsystems. After the event, we will be reporting on our blog about the discussions that took place.
As discussed in our previous blog post, Bootlin had again a strong presence at the Embedded Linux Conference North-America, with 8 attendees, 5 talks, one BoF and two E-ALE tutorial sessions.
In this blog post, we would like to highlight a number of talks from the conference that we found interesting. Each Bootlin engineer who attended the conference has selected one talk, and gives his/her feedback about this talk.
Device Tree BoF – Frank Rowand
Talk selected by Michael Opdenacker
The Device Tree BoF (Birds of a Feather session, which means an informal session about a technical topic, allowing participants to openly share questions and information) has been part of Embedded Linux Conferences for at least 2 or 3 years. For me, it has always been a good source of updates about the topic.
Frank started by sharing details about the Device Tree Workshop held in October in Prague, a one day meet-up and workshop for Device Tree contributors (like Maxime Ripard and Thomas Petazzoni from Bootlin who were invited), to address issues and plan for the next months. Slides and notes can be found on elinux.org.
Frank then went on by mentioning utilities, such as:
scripts/dtc/dt_to_config. It is not very new in the mainline kernel, but useful to generate a kernel configuration suitable for the devices present on your platform, in case you didn’t know this tool exists.
There’s an upcoming patch adding options to dtc (--annotate --full) to keep track of the line numbers in the device tree sources. This helps to locate in which DT source file a given property value comes from. The patch was idle for some time but Julia Lawall volunteered to take care of it. Thanks to her updates, this feature should be accepted in mainline soon.
The device tree compiler in mainline has also been augmented with further build checks. You can now use them by adding W=1 to make dtb. Here is an example for the Beagle Bone Black dtb:
make W=1 am335x-boneblack.dtb
CHK scripts/mod/devicetable-offsets.h
DTC arch/arm/boot/dts/am335x-boneblack.dtb
arch/arm/boot/dts/am335x-boneblack.dtb: Warning (unit_address_vs_reg): Node /ocp/i2c@44e0b000/tda19988 has a reg or ranges property, but no unit name
arch/arm/boot/dts/am335x-boneblack.dtb: Warning (unit_address_vs_reg): Node /ocp/i2c@44e0b000/tda19988/ports/port@0 has a unit name, but no reg property
arch/arm/boot/dts/am335x-boneblack.dtb: Warning (unit_address_vs_reg): Node /ocp/i2c@44e0b000/tda19988/ports/port@0/endpoint@0 has a unit name, but no reg property
arch/arm/boot/dts/am335x-boneblack.dtb: Warning (unit_address_vs_reg): Node /ocp/ethernet@4a100000/slave@4a100200 has a unit name, but no reg property
arch/arm/boot/dts/am335x-boneblack.dtb: Warning (unit_address_vs_reg): Node /ocp/ethernet@4a100000/slave@4a100300 has a unit name, but no reg property
arch/arm/boot/dts/am335x-boneblack.dtb: Warning (unit_address_vs_reg): Node /ocp/lcdc@4830e000/port/endpoint@0 has a unit name, but no reg property
arch/arm/boot/dts/am335x-boneblack.dtb: Warning (simple_bus_reg): Node /ocp/l4_wkup@44c00000/prcm@200000/clocks missing or empty reg/ranges property
arch/arm/boot/dts/am335x-boneblack.dtb: Warning (simple_bus_reg): Node /ocp/l4_wkup@44c00000/prcm@200000/clockdomains missing or empty reg/ranges property
arch/arm/boot/dts/am335x-boneblack.dtb: Warning (simple_bus_reg): Node /ocp/l4_wkup@44c00000/scm@210000/scm_conf@0/clocks missing or empty reg/ranges property
arch/arm/boot/dts/am335x-boneblack.dtb: Warning (simple_bus_reg): Node /ocp/l4_wkup@44c00000/scm@210000/clockdomains missing or empty reg/ranges property
As far as I am concerned, the most interesting news remained the one that since Linux 4.15, device tree overlays are now easier to code. You no longer have to define weird “fragment” elements. You can now directly write normal nodes and use labels. The syntax is now exactly the same as for regular device tree sources!
For more details, grab the slides and if you event want to follow the discussions that happened that day, watch the video.
Tutorial: Introduction to Reverse Engineering – Mike Anderson
Talk selected by Quentin Schulz
Mike presented in an unusual 2-hour-long slot the different techniques to reverse-engineer things and the different reasons why you’d do so. After a mandatory disclaimer that reverse engineering may be illegal in some regions of the world, he introduced the different tools that anyone aspiring to reverse engineer should possess: from the obvious logic analyzer, multimeter, screwdrivers to the surprising heat gun. He then gave the first and very important step of the reverse engineering process: gathering information about the product by looking for patents, the FCC registration, manufacturer as well as carefully opening its case to examine the different components (maybe with the help of a microscope).
Later, Mike gave the multiple ways to retrieve the firmwares from the product, from the soldering of a JTAG interface to the downloading from the official website. He then offered some tools that can be used to dive into binaries and start the guessing game, and he finished his talk with an example of a reverse engineering of a protocol which required a lot of guessing and social reverse engineering.
Mike’s talk was pleasant to attend because of the high-level presentation of how to do reverse engineering while giving a quick real-life example.
For more details, watch the video and grab the slides.
Graphics Performance Analysis with FrameRetrace: A Responsive UI for ApiTrace – Mark Janes, Intel
Talk selected by Boris Brezillon
I first heard of FrameRetrace when Eric Anholt asked us to add support for the VC4 GPU to this tool, and my experience with it had been rather frustrating in that I was mainly struggling to make it work on a not yet supported architecture instead of being a simple user. So, when I saw that Mark was giving a talk on FrameRetrace usefulness and how to use it, I figured I couldn’t miss it. Well, those who looked carefuly at the schedule know I couldn’t attend it because I was giving my talk at the same time, but I did see it at FOSDEM a month before, and I’m pretty sure not much has changed since then.
Mark first described the GPU debugging/perf-anlysis tools ecosystem, saying that each GPU vendor has its own proprietary tools which most of the time are only supported on Windows. FrameRetrace is an attempt at providing a tool that exposes similar features while being open-source, cross-platform, and easily extensible to new hardware. This project is actually based on an exisiting project called ApiTrace, which it uses to capture OpenGL traces. The new feature that is interesting in FrameRetrace is that you can select the frame you want to replay, get all the hardware perf counters exposed by the GPU for this specific rendering job in order to figure out what is going wrong and then play with the OpenGL code to see how you can make things better and replay the rendering job with your local modification to see if it actually solves the problem.
I must admit I was really impressed by the demo, and now I understand why Eric (and others in the community) would like to have their GPU properly supported in FrameRetrace. It really looks like the kind of tool you don’t know you need until you’ve tested it, but once you do, you can’t do without it.
For more details, watch the video and grab the slides.
The Salmon Diet: Up-Streaming Drivers as a Form of Optimization – Gilad Ben-Yossef
Talk selected by Miquèl Raynal
Gilad was hired about a year ago to become the maintainer of the ARM® TrustZone® CryptoCell® device driver. Until now this driver was out of tree until it has been decided to upstream it. Here starts Gilad’s story.
It appeared that the right way to make it upstream was to go through the staging tree and the whole process around it. It was the first time for him to do it that way, that is why he felt it was interesting to share his experience.
At the beginning of his talk, he recalls that the driver was actually working, people already relied on it. Plus, it was released under the GPL. While all of this could make you think it was clean enough, Gilad realized that people who wrote it actually did not think about upstreaming and almost every patch to clean that driver removed more lines than it added, shrinking step by step the driver until 30% of the lines were removed!
Of course, removing the existing hardware abstraction macros was something to do, as well as running and correcting the whole checkpatch.pl output, but there are plenty of other good habits that one can adapt to his own situation, explained and well illustrated all along this talk.
For more details, watch the video and grab the slides.
Measuring and Summarizing Latencies using the Trace Event Subsystem – Tom Zanussi
Talk selected by Maxime Chevallier
Having some experience dealing with RT topics on Linux, I was looking forward to seeing Tom’s talk about these tracing features.
He gave really good examples on how to use the existing ‘latency histogram’ traces to get a cyclictest-like metric of wakeup latencies by measuring the time between sched_waking and sched_switch, and explaining how this could be re-used for other measurements such as network latencies.
What he presented was more than just having a trace in a buffer when a function is called. The tracing subsystem allows the use of handlers to perform actions when an event occurs. As an example, he demonstrated how to use the onmax handler to accumulate the maximum wakeup latency observed, each time saving crucial pieces of information on the execution context.
He then went on to describe the next-level features that are being merged, namely function events by Steven Rostedt, and Inter events by Tom himself. They allow the user to use any of the kernel functions as tracepoints, and build complex events and traces to pinpoint really specific sequences.
I recommend to read this LWN article on inter-event tracing, and of course have a look at Tom’s talk and slides.
Steering Xenomai into the Real-Time Linux Future – Jan Kiszka
Talk selected by Thomas Petazzoni
In this talk, long-term Xenomai developer and Siemens engineer Jan Kiszka gave a very interesting status of the Xenomai project and its roadmap. He started by refreshing the audience about what Xenomai is: an RTOS-to-Linux portability framework. It comes in two flavors: a co-kernel extension for a patched Linux kernel, and as libraries running for native Linux (including PREEMPT_RT). He then went on to compare the respective advantages and drawbacks of the two flavors, citing accurate modeling of legacy RTOS behavior and strong separation of real-time vs. non real-time code as the key advantages of the co-kernel approach.
Jan then summarized the history of Xenomai, from the early days as a sub-project of RTAI to the current status of Xenomai 3.0, released in 2015 after more than 5 years of development. However, even though Xenomai is widely used in the industry, its development relies on just a few individuals. Siemens is a heavy user of Xenomai, and in 2017, they started a discussion: should they migrate away from Xenomai or invest into it. Siemens made the decision to invest in the project. The same year, Xenomai main developer Philippe Gerum published an e-mail RTnet, Analogy and the elephant in the room also calling for help to maintain some parts of Xenomai.
Following those discussions, some changes were decided in the Xenomai project: Philippe Gerum will step back from the project lead, and Jan Kiszka will take over his role.
Regarding the I-Pipe kernel patch (which allows to support the co-kernel approach), the Xenomai project will discontinue a number of architectures (nios2, SH, Blackfin, PPC64, ARM < v7) and will only maintain patches for the latest Linux kernel LTS, in order to reduce the maintenance effort.
Jan announced that Xenomai 3.0.7 is soon to be released, that Xenomai 3.1 will introduce ARM64 support, and that Xenomai 2 is unmaintained and therefore users should migrate to Xenomai 3. He also gave a status on the driver stacks, citing that RTnet needs more love, and that Analogy is orphaned and needs a new maintainer.
Towards the end of his talk, Jan then started discussing the more distant future of Xenomai. The future version of Xenomai has the goal of improving the integration of the co-kernel approach, to simplify maintenance and possibly provide a chance to be upstreamed in Linux. This new approach will be split in two elements, called Dovetail (interrupt routing, co-kernel hooks) and Steely (co-kernel implementation). He made it clear that this is currently not production-ready at all. He noted that this new implementation allows a significant reduction of the code base, about 50% smaller than the current implementation. The code is already available in two Git repositories: Dovetail and Steely.
All in all, Jan’s talk was a very interesting one, providing a good coverage of Xenomai’s status and future. The video of his talk is definitely worth watching, and the slides are also available.
An Introduction to Asymmetric Multiprocessing: When this Architecture can be a Game Changer and How to Survive It – Nicola La Gloria & Laura Nao
Talk selected by Mylène Josserand
In this talk, Nicola La Gloria and Laura Nao from Kynetics presented how to handle communication between a micro-controller running bare metal code and a CPU with a full OS (such as GNU/Linux or Android).
They showed the different approaches for communication (supervised or not supervised: i.e. CPU and MCU can communicate using an hypervisor or directly) and presented the Inter-Processing Communication.
After this introduction, Laura told us about their use-case, running on an NXP i.MX7, which comprises a Cortex-M4 micro-controller and a Cortex-A7 processor: the MCU retrieves data from a sensor, which will be displayed by the CPU.
She gave feedback on how they implemented this communication and the different mechanisms used (Message Unit, RPMsg, RDC, kexec/kdump, etc). The explanation of the different mechanisms was really interesting, and particularly relevant for those who had never heard about them.
They did a short tutorial and gave some tips that would definitely be appreciated by people who start this kind of project. And finally, they did a demonstration of all the work they have done.
So if you are interested in the subject or even only for your general knowledge, have a look at their talk (video and slides).
System-in-Package Technology: Making it Easier to Build Your Own Linux Computer – Erik Welsh & Jason Kridner
Talk selected by Alexandre Belloni
Eric Welsh started to talk about how software influences hardware design and why open source hardware matters. He then presented the System-in-Package technology and in particular the Octavo OSD3358. It includes a TI AAM335x SoC, DDR3 SDRAM, a PMIC and all the related power circuitry, components which are always required. This allows the hardware engineers to concentrate on the added value of the final product.
Great pictures and videos of the SiP internals and its manufacturing process were shown.
Jason then came on stage to present the OSD3358 integration on the PocketBeagle.
Eric finally explained how easy it is to assemble the OSD3358 on a PCB, even by hand with a video to prove it. He finally concluded by summing up the benefits of using a SiP: easy bring-up, lower cost of PCB, easy manufacturing and migration from SBC prototyping to custom PCB.
It was quite enlightening for software engineers as it showed the hardware internals with some great details.
Have a look at the video and slides.
In conclusion, this was again a really nice opportunity to share and acquire knowledge from other engineers deeply involved in the Open Source community, as well as meeting people that we sometimes know only by their name on a mailing list. Next year this event will happen in Monterey Bay, California (March 19 – 21, 2019). See you there!
Like every year for more than 10 years, Bootlin engineers will participate to the next Embedded Linux Conference, which takes place in Portland on March 12-14. Of course, it will be our first ELC with our new company name! In total, eight engineers from Bootlin will participate to the event. Maxime Chevallier, who joined Bootlin last Monday, will be attending the conference, his first one with a Bootlin hat (but Maxime has already been a speaker at the last Embedded Linux Conference Europe).
We will also be giving a number of talks, tutorials or moderating Bird of a Feather sessions:
Miquèl Raynal will give a talk titled Drive your NAND with Linux, sharing his experience rewriting the NAND controller driver for Marvell platforms, significantly improving the NAND core subsystem along the way, making it more flexible to support advanced NAND controllers.
Continuing a long-standing tradition, Michael Opdenacker will moderate a BoF on Embedded Linux Size, an area that has seen interesting developments over the last year.
Alexandre Belloni, at the very end of the event, will give a talk titled Ethernet switch support in the Linux kernel, in which he will share his experience using the Linux kernel switchdev subsystem to support an Ethernet switch found in some Microsemi MIPS processors.
We’re really happy to again meet the embedded Linux open-source community at this event! It is worth mentioning that following this event, Bootlin CTO Thomas Petazzoni will be in the Silicon Valley on March 15-16, available for business meetings: do not hesitate to contact us if you’re interested.
 This talk was given by Bootlin engineer Maxime Ripard, who has worked since spring 2018 with Paul Kocialkowski on adding support in the upstream Linux kernel for hardware-accelerated video decoding on Allwinner platforms. This project was the topic of the successful crowd-funding campaign we launched in February 2018, and for which we regularly posted updates on our blog.
This talk was given by Bootlin engineer Maxime Ripard, who has worked since spring 2018 with Paul Kocialkowski on adding support in the upstream Linux kernel for hardware-accelerated video decoding on Allwinner platforms. This project was the topic of the successful crowd-funding campaign we launched in February 2018, and for which we regularly posted updates on our blog.
 This talk was given by Bootlin engineers Maxime Chevallier and Antoine Ténart, who shared their knowledge and experience working on enabling network hardware in Linux, trying to clarify how Ethernet MAC and PHYs interact, how PHYs communicate with their link partner, what are the protocols involved, etc.
This talk was given by Bootlin engineers Maxime Chevallier and Antoine Ténart, who shared their knowledge and experience working on enabling network hardware in Linux, trying to clarify how Ethernet MAC and PHYs interact, how PHYs communicate with their link partner, what are the protocols involved, etc. This talk was given by Miquèl Raynal, who has worked with Bootlin engineer Boris Brezillon on adding support for SPI NAND in U-Boot and Linux, as well as improving in general the support for SPI flash memory, see our previous blog post.
This talk was given by Miquèl Raynal, who has worked with Bootlin engineer Boris Brezillon on adding support for SPI NAND in U-Boot and Linux, as well as improving in general the support for SPI flash memory, see our previous blog post.