Better late than never: we are finally publishing a set of videos of 24 talks from the last Embedded Linux Conference, which took place earlier this year in San Francisco, California. These videos are coming in addition to the videos that the Linux Foundation had posted from this conference on video.linux.com.
Better late than never: we are finally publishing a set of videos of 24 talks from the last Embedded Linux Conference, which took place earlier this year in San Francisco, California. These videos are coming in addition to the videos that the Linux Foundation had posted from this conference on video.linux.com.
Our videos are the ones from other talks, covering topics such as I2C, the BeagleBone, the Common Display Framework, Kernel debugging, Memory management in the kernel, usage of SPDX in Yocto, the SCHED_DEADLINE scheduler, the management of ARM SoC support in the kernel, real-time, kernel testing, and more. We’re also including below the full set of videos from the Linux Foundation, so that this page nicely gives links to all the videos from Embedded Linux Conference 2013.
Our videos
David Anders
Texas Instruments
Board Bringup: You, Me and I2C
Slides
Video (38 minutes):
full HD (269M), 800×450 (151M)
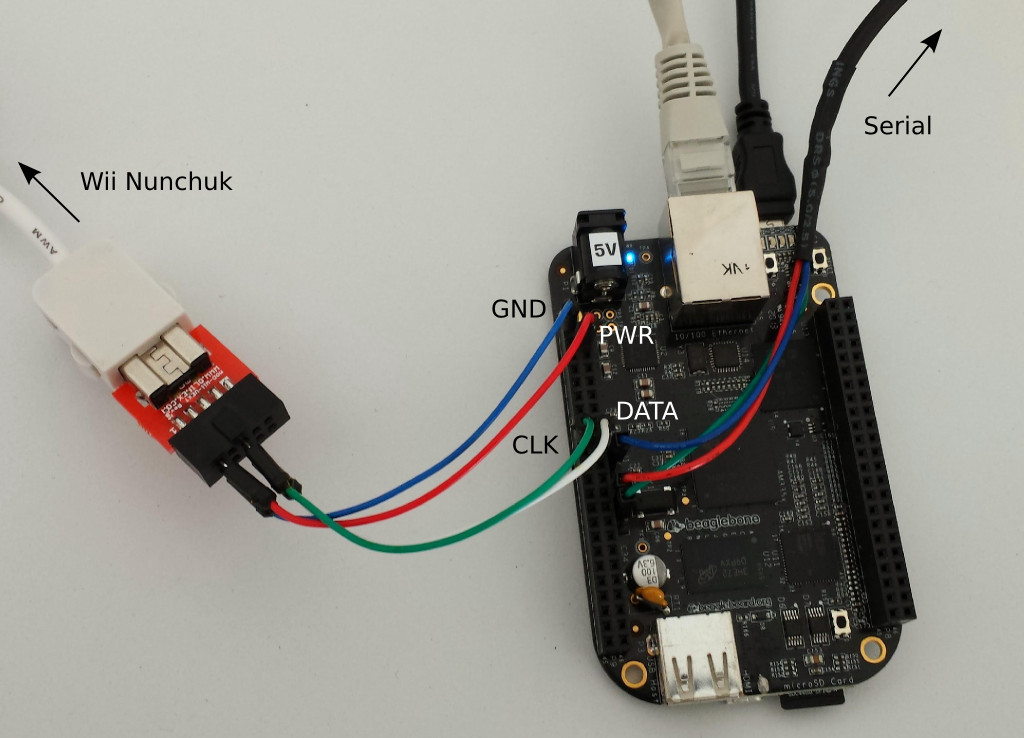
Jayneil Dalal
Texas Instruments
Beaglebone Hands-On Tutorial
Slides
Video (66 minutes):
full HD (444M), 800×450 (249M)
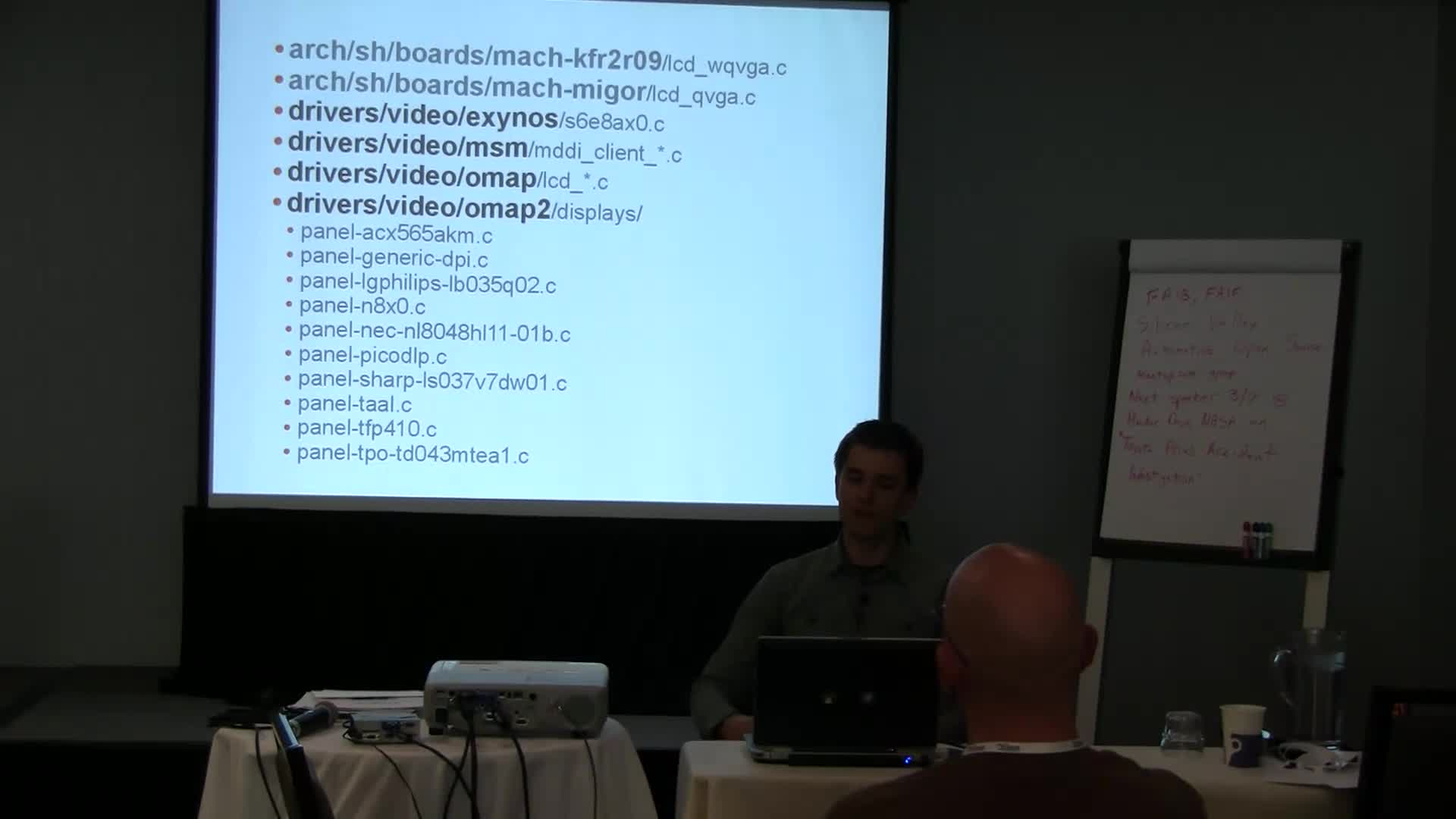
Jesse Barker
Linaro
Common Display Framework BoF
Video (113 minutes):
full HD (761M), 800×450 (389M)
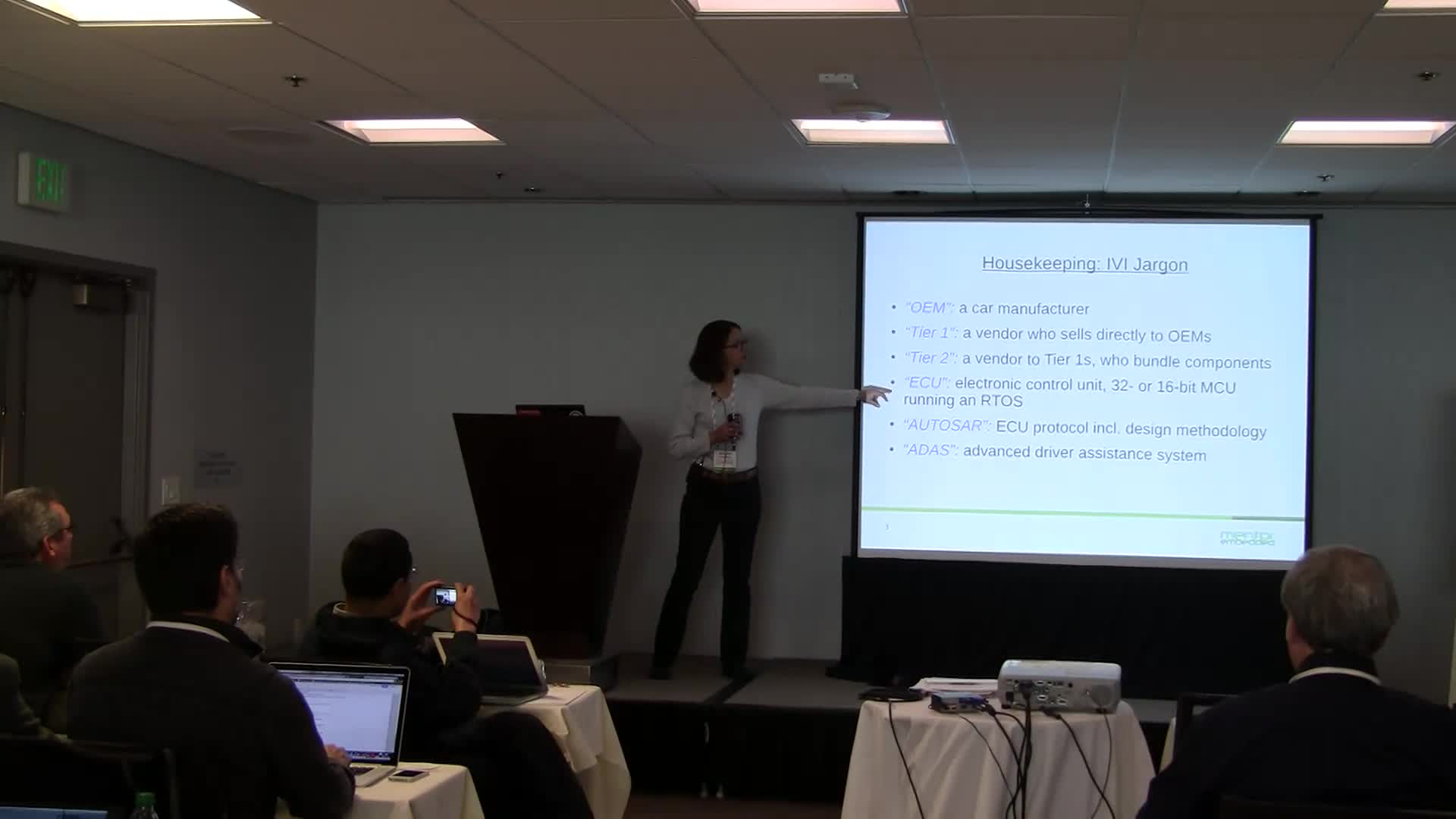
Alison Chaiken
Mentor Embedded Software Division
Embedded Linux Takes on the Hard Problems of Automotive
Slides
Video (54 minutes):
full HD (359M), 800×450 (152M)
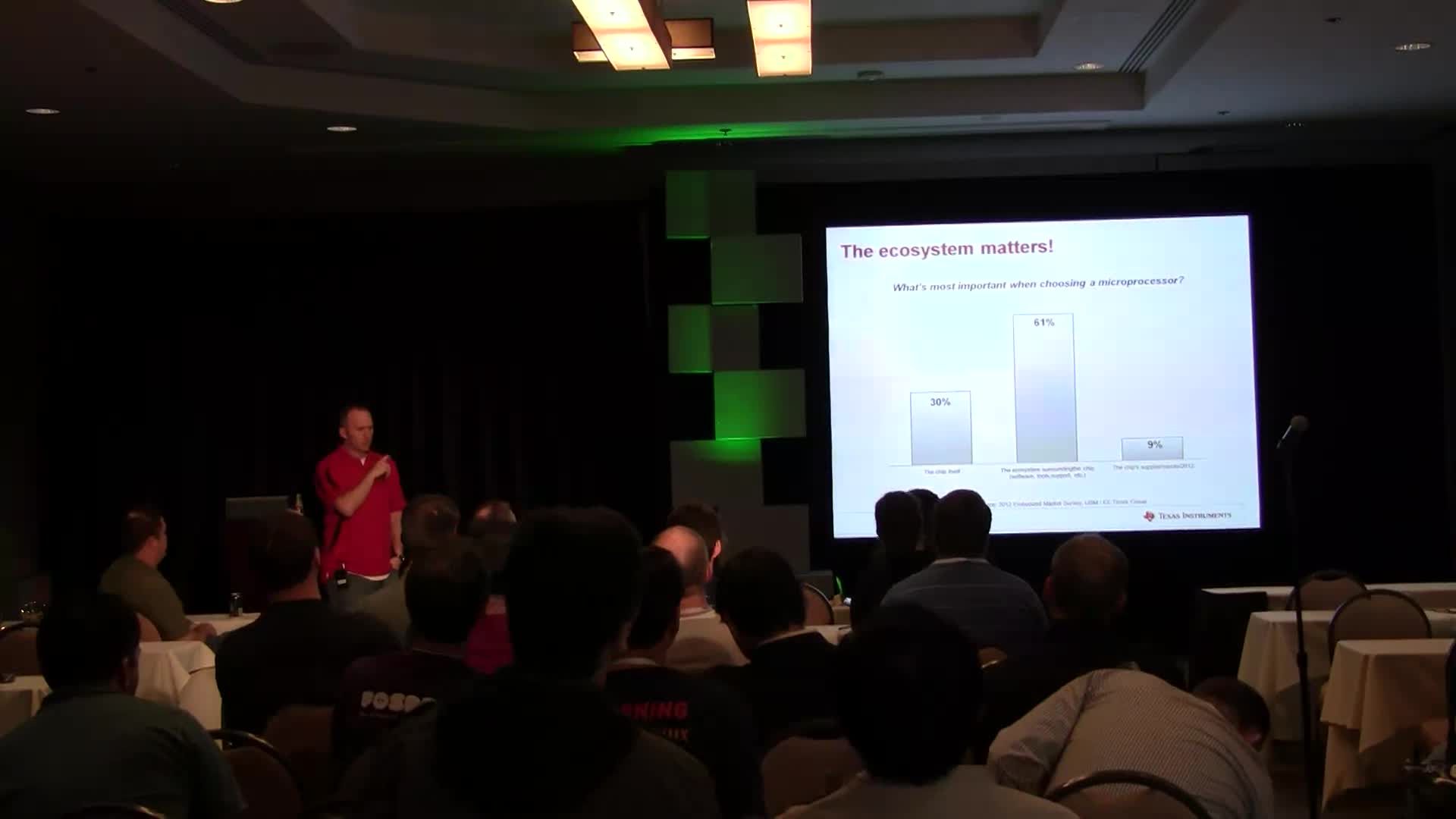
Kevin Chalmers
Texas Instruments
RFC: Obtaining Management Buy-in for Mainline Development
Slides
Video (36 minutes):
full HD (253M), 800×450 (140M)
Michael Christofferson
Enea
Yocto Meta-Virtualization Layer Project
Slides
Video (47 minutes):
full HD (330M), 800×450 (187M)
Kevin Dankwardt
K Computing
Survey of Linux Kernel Debugging Techniques
Slides
Video (50 minutes):
full HD (350M), 800×450 (206M)
Ezequiel Alfredo Garcia
VanguardiaSur
Kernel Dynamic Memory Allocation Tracking and Reduction
Slides
Video (56 minutes):
full HD (398M), 800×450 (235M)
Christopher Friedt
Research In Motion
Gentoo-Bionic: We Can Rebuild Him. Better. Stronger. Faster.
Slides
Video (39 minutes):
full HD (272M), 800×450 (154M)
Gregoire Gentil
Always Innovating
Lessons Learned in Designing a Self-Video, Self-Hovering Nano Copter
Video (56 minutes):
full HD (391M), 800×450 (225M)
Mark Gisi, Mark Hatle
Wind River Systems
Leveraging SPDX with Yocto
Video (53 minutes):
full HD (376M), 800×450 (204M)
Yoshitake Kobayashi
TOSHIBA Corporation
Deadline Miss Detection with SCHED_DEADLINE
Slides
Video (38 minutes):
full HD (274M), 800×450 (158M)
Tetsuyuki Kobayashi
Kiyoto Microcomputer
Tips of Malloc and Free
Slides
Video (39 minutes):
full HD (277M), 800×450 (163M)
Tristan Lelong
Adeneo Embedded
Debugging on a Production System
Slides
Video (51 minutes):
full HD (354M), 800×450 (195M)
Noor UI Mubeen
Intel Technology India Pvt Ltd
Making Gadgets Really “cool”
Slides
Video (45 minutes):
full HD (298M), 800×450 (122M)
Hisao Munakata
Renesas Electronics
How to Cook the LTSI Kernel with Yocto Recipe
Slides
Video (42 minutes):
full HD (295M), 800×450 (166M)
Olof Johansson
Google
Anatomy of the arm-soc git tree
Slides
Video (50 minutes):
full HD (348M), 800×450 (192M)
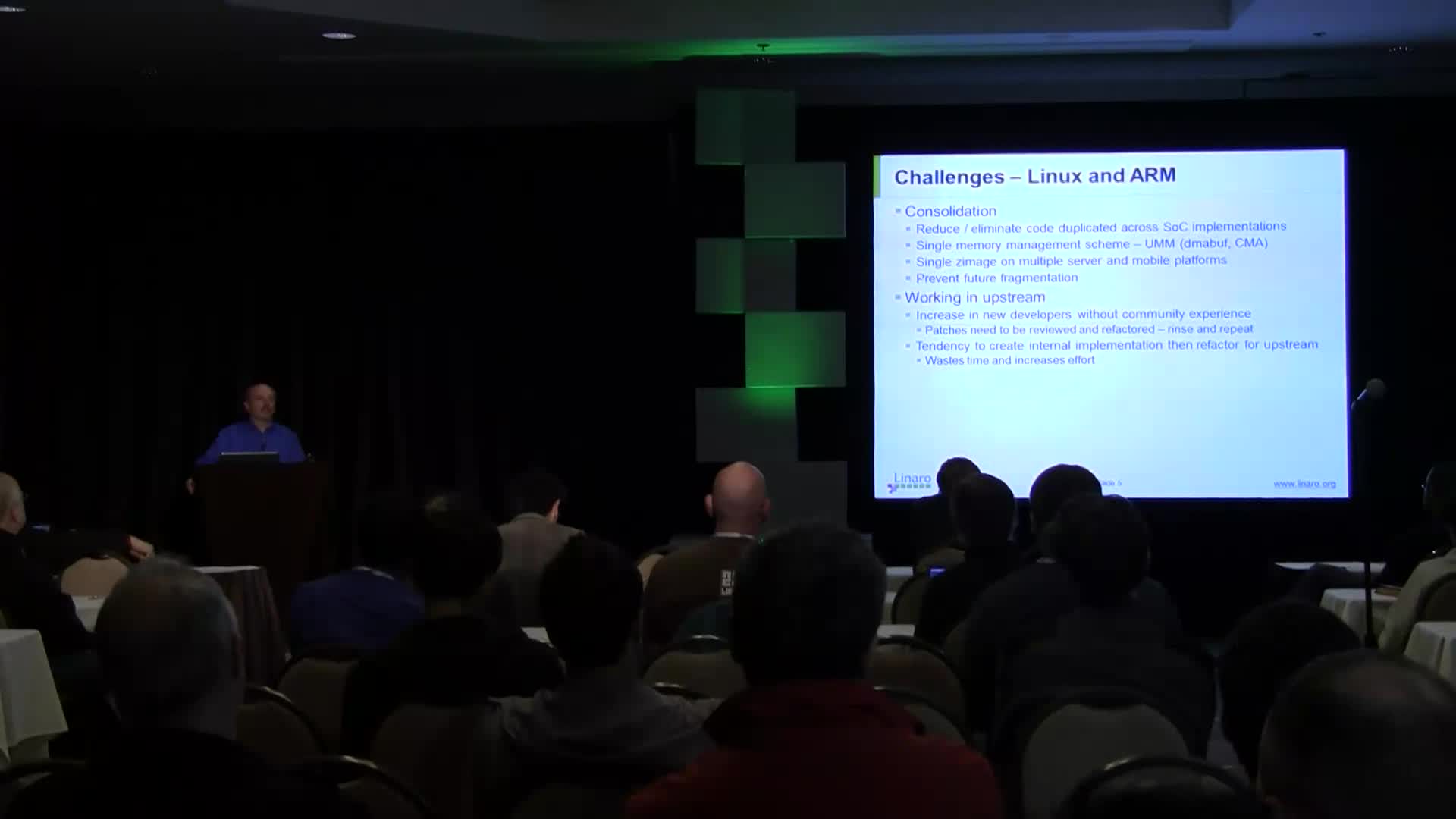
Mark Orvek
Linaro
Application Diversity Demands Accelerated Linux Innovation
Slides
Video (38 minutes):
full HD (273M), 800×450 (158M)
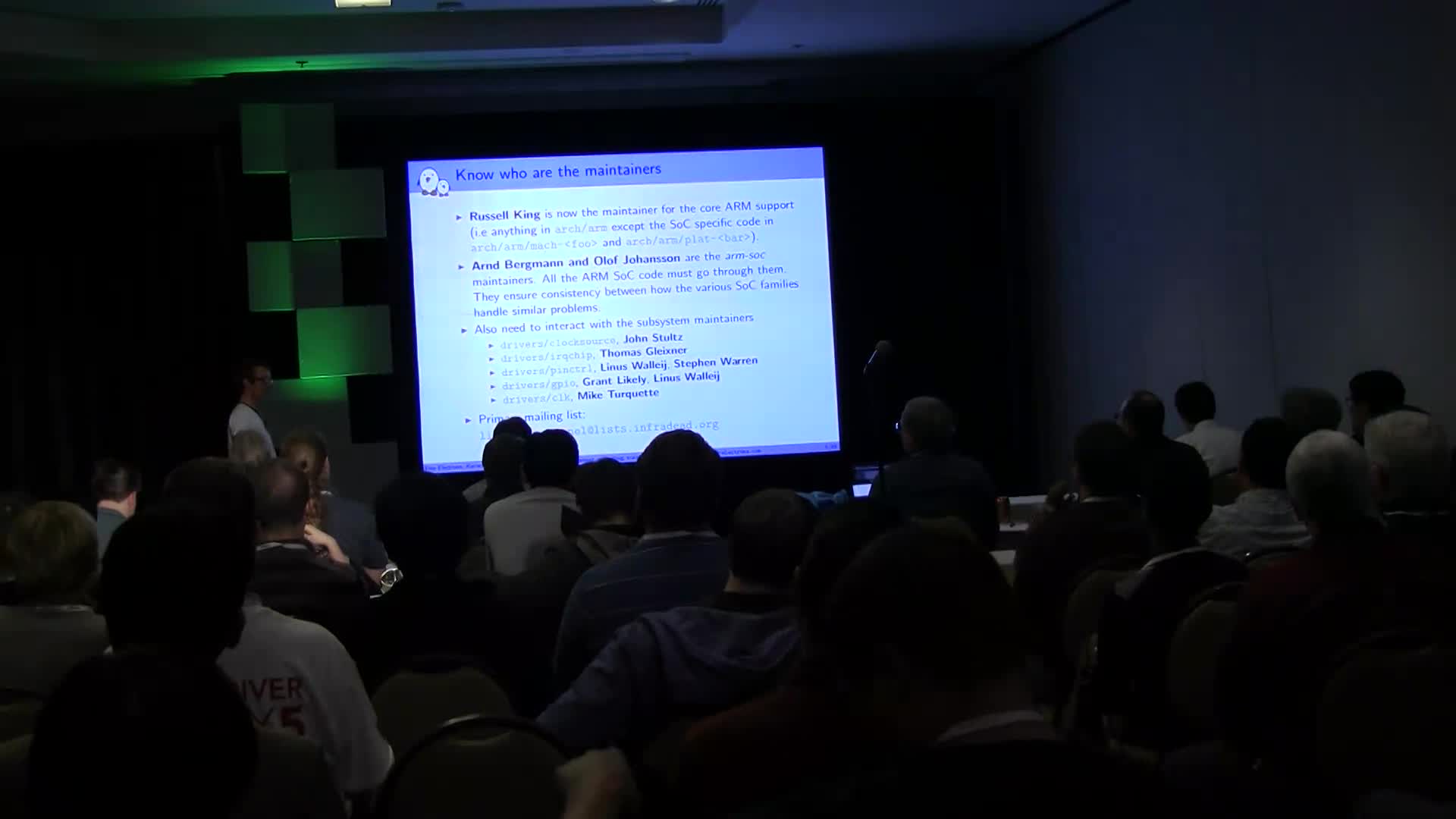
Thomas Petazzoni
Bootlin
Your New ARM SoC Linux Support Checklist!
Slides
Video (60 minutes):
full HD (418M), 800×450 (231M)
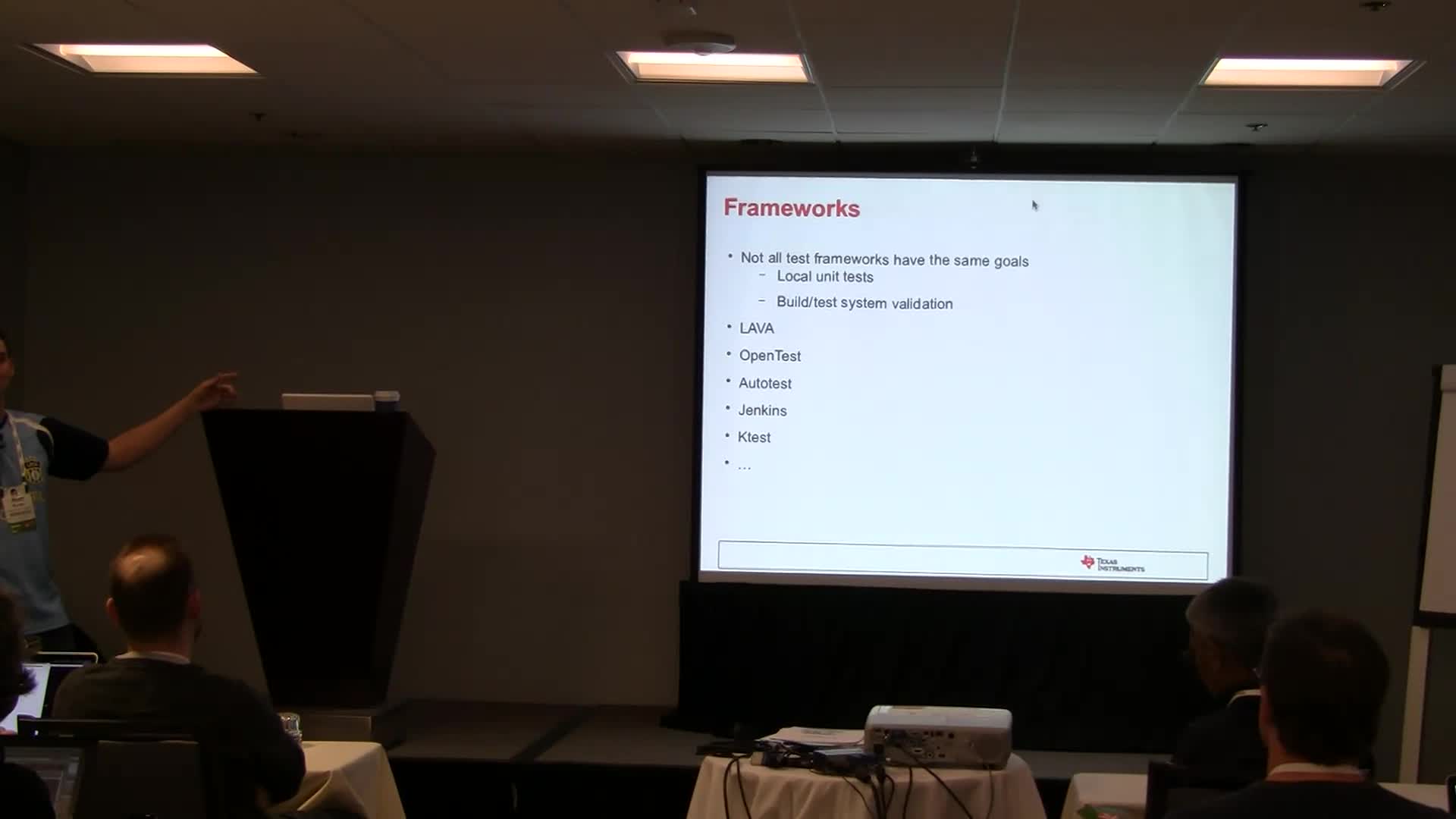
Matt Porter
Texas Instruments, Inc.
Kernel Testing Tools and Techniques
Slides
Video (60 minutes):
full HD (405M), 800×450 (230M)
Brent Roman
Monterey Bay Aquarium Research Institute
Making Linux do Hard Real-Time
Slides
Video (24 minutes):
full HD (173M), 800×450 (101M)
Mans Rullgard
ARM/Linaro
Designing for Optimisation
Slides
Video (50 minutes):
full HD (353M), 800×450 (202M)
Chris Simmonds
2net Limited
The End of Embedded Linux (as we know it)
Video (46 minutes):
full HD (293M), 800×450 (137M)
Hunyue Yau
HY Research LLC
uCLinux for Custom Mobile Devices
Slides
Video (40 minutes):
full HD (283M), 800×450 (151M)
Linux Foundation videos
Joo-Young Hwang
Samsung Electronics Co., Ltd.
F2FS, Flash-Friendly File System
Slides
Video : on video.linux.com
Linus Walleij
ST-Ericsson
Pin Control and GPIO Update
Slides
Video : on video.linux.com
Mark Gross
Intel
The ‘Embedded Problem’ as Experienced by Intel’s Reference Phones
Video : on video.linux.com
Gap-Joo Na
Electronics and Telecommunications Research Institute (ETRI)
Task Scheduling for Multicore Embedded Devices
Slides
Video : on video.linux.com
Joel Fernandes
Texas Instruments, Inc
FIT Image Format: Inspired by Kernel’s Device Tree
Slides
Video : on video.linux.com
Steven Rostedt
Red Hat
Understanding PREEMPT_RT (The Real-Time Patch)
Slides
Video : on video.linux.com
Ruud Derwig
Synopsys
Using GStreamer for Seamless Off-loading Audio Processing to a DSP
Slides
Video : on video.linux.com
Rob Landley
Multicelluar
Toybox: Writing a new Linux Command Line from Scratch
Slides
Video : on video.linux.com
Denys Dmytriyenko
Texas Instruments
Pre-built Binary Toolchains in Yocto Project
Slides
Video : on video.linux.com
Anna Dushistova
Me, Myself and I
Target Communication Framework: One Link to Rule Them All
Slides
Video : on video.linux.com
Jim Huang
0xlab
olibc: Another C Runtime Library for Embedded Linux
Slides
Video : on video.linux.com
Jake Edge
LWN.net
Namespaces for Security
Slides
Video : on video.linux.com
Beth Flanagan
Intel
Listening to your Users: Refactoring the Yocto Project Autobuilder
Video : on video.linux.com
Katsuya Matsubara
– , IGEL Co., Ltd.
Optimizing GStreamer Video Plugins: A Case Study with Renesas SoC Platform
Slides
Video : on video.linux.com
Behan Webster
Converse in Code Inc
LLVMLinux: Compiling the Linux Kernel with LLVM
Slides
Video : on video.linux.com
Jim Zemlin, George Grey
The Linux Foundation, Linaro
Working Together to Accelerate Linux Development
Video : on video.linux.com
Andrew Chatham
Google
Google’s Self-Driving Cars: The Technology, Capabilities & Challenges
Video : on video.linux.com
Laurent Pinchart
Ideas on board SPRL
Anatomy of an Embedded KMS Driver
Slides
Video : on video.linux.com
Scott Garman
Intel Open Source Technology Center
Atom for Embedded Linux Hackers and the DIY Community
Video : on video.linux.com
Mike Anderson
The PTR Group, Inc.
Controlling Multi-Core Race Conditions on Linux/Android
Video : on video.linux.com
Tracey Erway, Nithya Ruff
Intel Corporation, Synopsys
Can You Market an Open Source Project?
Video : on video.linux.com
Dave Stewart
Intel
Code Sweat: Embed with Nightmares
Video : on video.linux.com
Gregory Clement
Bootlin
Common Clock Framework: How to Use It
Slides
Video : on video.linux.com
Sean Hudson
Mentor Graphics
Building a Custom Linux Distribution with the Yocto Project
Slides
Video : on video.linux.com
Tzugikazu SHibata
NEC
How to Decide the Linux Kernel Version for the Embedded Products to Keep Maintaining Long Term
Slides
Video : on video.linux.com
Mathieu Poirer
Linaro
In Kernel Switcher: A Solution to Support ARM’s New big.LITTLE implementation
Slides
Video : on video.linux.com
Russell Dill
Texas Instruments
Extending the swsusp Hibernation Framework to ARM
Slides
Video : on video.linux.com
John Mehaffey
Mentor Graphics
Security Best Practices for Embedded Systems
Slides
Video : on video.linux.com
Leandro Pereira
ProFUSION Embedded System
EasyUI: No Nonsense Mobile Application Development with EFL
Video : on video.linux.com
Khem Raj
OpenEmbedded
Bringing kconfig to EGLIBC
Slides
Video : on video.linux.com
Aaditya Kumar
Sony India Software Centre Pvt Lltd
An Insight into the Advanced XIP Filesystem (AXFS)
Slides
Video : on video.linux.com
Pantelis Antoniou
Antoniou Consulting
Adventures in (simulated) Assymmetric Scheduling
Slides
Video : on video.linux.com
Mike Anderson, The PTR group; Zach Pfeffer, Linaro; Tim Bird, Sony Network Entertainment; David Stewart, Intel; Karim Yaghmour, Opersys (Moderator)
Is Android the new Embedded Linux
Video : on video.linux.com
George Grey, CEO, Linaro, Jim Zemlin, Executive Director, The Linux Foundation
Working Together to Accelerate Linux Development
Video : on video.linux.com
Frank Rowand
Sony Network Entertainment
Using and Understanding the Real-Time Cyclictest Benchmark
Slides
Video : on video.linux.com
 As usual, our training materials are available under the terms of the Creative Commons Attribution-ShareAlike 3.0 license. This essentially means that you are free to download, distribute and even modify them, provided you mention us as the original authors and that you share these documents under the same conditions.
As usual, our training materials are available under the terms of the Creative Commons Attribution-ShareAlike 3.0 license. This essentially means that you are free to download, distribute and even modify them, provided you mention us as the original authors and that you share these documents under the same conditions.
 The 3.12 kernel has
The 3.12 kernel has