Linux 6.4 was released on June 25, just before the start of the Embedded Open Source Summit in Prague. As usual, lots of changes in Linux 6.4, and we recommend reading LWN coverage of the merge window (part 1, part 2). Sadly, the usual KernelNewbies page hasn’t received a lot of attention, contributions are probably welcome to revive this useful resource.
With 59 commits from Bootlin engineers, Bootlin is ranked as the #28 contributing company by number of commits for this 6.4 release, according to contribution statistics. Our main contributions have been:
Alexis Lothoré and Clément Léger contributed a few fixes to the Renesas RZ/N1 A5PSW Ethernet switch driver
Luca Ceresoli improved the fsl-ldb driver, used on NXP i.MX8MP and i.MX93 for the built-in DPI-to-LVDS encoder. Luca’s improvement allows to use LVDS channel 1 only, while the driver initially supported using either LVDS channel 0, or LVDS channel 0 and 1 combined.
Maxime Chevallier contributed an improvement to the regmap code, which allows upshifting register addresses before performing operations
Maxime Chevallier also contributed some small fixes to the phylink code related to previous work on QUSGMII support
Miquèl Raynal contributed the support for Real-While-Write in the MTD SPI-NOR subsystem. This allows to perform read operations while erase/program operations are on-going, which helps to reduce read latencies. This of course only works on SPI NOR chips that support this feature.
Miquèl Raynal contributed several improvements to the NVMEM subsystem. First, a brand new NVMEM driver capable of parsing the ONIE TLV information, as defined by the ONIE spec used on network equipment. Second, he contributed changes that allow NVMEM layout drivers to be compiled as kernel modules rather than being built-in
At Bootlin, we contributed a total of 122 patches to this release, making Bootlin the 21st contributing company by number of commits according to statistics. Also Bootlin engineer Paul Kocialkowski appears in the top developers by changed lines in the Linux 6.2 statistics.
Back in December 2021, we announced the buildroot-external-st project, which is an extension of the Buildroot build system with ready-to-use configurations for the STMicroelectronics STM32MP1 platforms. Later on, in July 2022, we updated it to the lastest Buildroot LTS 2022.02 and version 4.0 of ST BSP version.
More specifically, this project is a BR2_EXTERNAL repository for Buildroot, with a number of defconfigs that allow to quickly build embedded Linux systems for the STM32MP1 Discovery Kit platforms. It’s a great way to get started with Buildroot on those platforms.
Today, we are happy to announce an updated version of this project, published under the branch st/2022.02.7 at https://github.com/bootlin/buildroot-external-st. This new version brings the following changes:
Linux 6.1 has been released yesterday, a week later than expected. Head over to LWN (part 1, part 2) or KernelNewbies for an overview of the major features merged in this release.
For this release, Bootlin contributed a total of 38 patches, with the following highlights:
Maxime Chevallier added initial support for the QUSGMII PHY mode, together with supporting code in the lan966x MAC driver and lan966x PHY driver.
Maxime Chevallier added a new PCS driver for the Altera PSE
Maxime Chevallier converted the Altera TSE MAC driver to phylink
Paul Kocialkowski contributed many improvements to the Allwinner sun6i camera interface driver, which are preparation commits to introduce support for interacting with the Allwinner ISP
Linux 6.0 has been released two weeks ago, and Linux 6.1-rc1 is already out of the door, but we didn’t get the chance to look at the contributions made by Bootlin to the Linux 6.0 release. Before we do that, let’s provide our usual must-read articles on Linux 6.0: the Linux 6.0 merge window part 1 and Linux 6.0 merge window part 2 LWN.net articles and the KernelNewbies.org article.
On Bootlin side, our significant contributions to this release have been:
Clément Léger contributed a new driver for the Ethernet switch found in the Renesas RZ/N1 processor, as well as a PCS driver for the MII converter of the same processor. Obviously, this came with the related Device Tree bindings and Device Tree changes, but also with a few small changes in the DSA subsystem.
Hervé Codina enabled support for the PCIe controller found in the same Renesas RZ/N1 processor, which in fact does not allow to use PCIe devices, but USB devices: this PCIe controller is only used to connect to an internal USB controller in the chip, which therefore allows to use USB devices.
Köry Maincent extended the existing mpc4922 DAC IIO driver to also support the mpc4921 variant, which has only one output channel instead of two.
Luca Ceresoli contributed several improvements to the I2C subsystem documentation.
Paul Kocialkowski contributed two new V4L drivers for the MIPI CSI-2 camera interfaces available in the Allwinner A31 family of processors (sun6i) and the Allwinner A83T family of processors (sun8i).
Here is the full details of our contributions, commit by commit:
As part of a team effort to improve the upstream Linux kernel support for the Renesas RZ/N1 ARM processor, we had to write from scratch a new RTC driver for this SoC. The RTC subsystem API is rather straightforward but, as most kernel subsystems, the documentation about it is rather sparse. So what are the steps to write a basic RTC driver? Here are some pointers.
The registration
The core expects drivers to allocate, initialize and then register a struct rtc_device with the device managed helpers: devm_rtc_allocate_device() and devm_rtc_register_device(). Between these two function calls, one will be required to provide at least a set of struct rtc_class_ops which contains the various callbacks used to access the device from the core, as well as setting a few information about the device.
The kind of information expected is the support for various features (rtcdev->features bitmap) as well as the maximum continuous time range supported by your RTC. If you do not know the actual date after which your device stops being reliable, you can use the rtc-range test tool from rtc-tools, available at https://git.kernel.org/pub/scm/linux/kernel/git/abelloni/rtc-tools.git (also available as a Buildroot package). It will check the consistency of your driver against a number of common known-to-be-failing situations.
Time handling
The most basic operations to provide are ->read_time() and ->set_time(). Both functions should play with a struct rtc_time which describes time and date with members for the year, month, day of the month, hours (in 24-hour mode), minutes and seconds. The week day member is ignored by userspace and is not expected to be set properly, unless it is actively used by the RTC, for example to set alarms. There are then three popular ways of storing time in the RTC world:
either using the binary values of each of these fields
or using a Binary Coded Decimal (BCD) version of these fields
or, finally, by storing a timestamp in seconds since the epoch
In BCD, each decimal digit is encoded using four bits, eg. the number 12 could either be coded by 0x0C in hexadecimal, or 0x12 in BCD, which is easier to read with a human eye.
The three representations are absolutely equivalent and you are free to convert the time from one system to another when needed:
#1 <-> #2 conversions are done with bcd2bin() and bin2bcd() (from linux/bcd.h)
#1 <-> #3 conversions are done with rtc_time64_to_tm() and rtc_tm_to_time64() (from linux/rtc.h)
While debugging, it is likely that you will end up dumping these time structures. Note that struct rtc_time is aligned on struct tm, this means that the year field is the number of years since 1900 and the month field is the number of months since January, in the range 0 to 11. Anyway, dumping these fields manually is a loss of time, it is advised instead to use the dedicated RTC printk specifiers which will handle the conversion for you: %ptR for a struct rtc_time, %ptT for a time64_t.
Of course, when reading the actual time from multiple registers on the device and filling those fields, be aware that you should handle possible wrapping situations. Either the device has an internal latching mechanism for that (eg. the front-end of the registers that you must read are all frozen upon a specific action) or you need to verify this manually by, for instance, monitoring the seconds register and try another read if it changed between the beginning and the end of the retrieval.
If your device continuous time range ended before 2000 you may want to shift the default hardware range further by providing the start-year device tree property. The core will then shift the Epoch further for you.
Finally, once done, you can verify your implementation by playing with the rtc test tool (also from rtc-tools).
Supporting alarms
One common RTC feature is the ability to trigger alarms at specific times. Of course it’s even better if your RTC can wake-up the system.
If the device or the way it is integrated doesn’t support alarms, this should be advertised at registration time by clearing the relevant bit (RTC_FEATURE_ALARM, RTC_FEATURE_UPDATE_INTERRUPT). In the other situations, it is relevant to indicate whether the RTC has a second, 2-seconds or minute resolution by setting the appropriate flag (RTC_FEATURE_ALARM_RES_2S, RTC_FEATURE_ALARM_RES_MINUTE). Mind when testing that querying an alarm time below this resolution will return a -ETIME error.
When implementing the ->read_alarm(), ->set_alarm() and ->alarm_irq_enable() hooks, be aware that the update and periodic alarms are now implemented in the core, using HR timers rather than with the RTC so you should focus on the regular alarm. The read/set hooks naturally allow to read and change the alarm settings. A struct rtc_wkalrm *alrm is passed as parameter, alrm->time is the struct rtc_time and alrm->enabled the state of the alarm (which must be set in ->set_alarm()). The third hook is an asynchronous way to enable/disable the alarm IRQ.
The interrupt handler for the alarm is required to call rtc_update_irq() to signal the core that an alarm happened, providing the RTC device, the number of alarms reported (usually one), and the RTC_IRQF flag OR’ed with the relevant alarm flag (likely, RTC_AF for the main alarm).
Oscillator offset compensation
RTC counters rely on very precise clock sources to deliver accurate times. To handle the situation where the source is not matching the expected precision, which is the case with most cheap oscillators on the market, some RTCs have a mechanism allowing to compensate for the frequency variation by incrementing or skipping the RTC counters at a regular interval in order to get closer to the reality.
The RTC subsystem offers a set of callbacks, ->read_offset() and a ->set_offset(), where a signed offset is passed in ppb (parts per billion).
As an example, if an oscillator is below its targeted frequency of 32768 Hz and is measured to run at 32767.7 Hz, we need to offset the counter by 1 - (32767.7/32768) = 9155 ppb. If the RTC is capable of offsetting the main counter once every 20s it means that every 20s, this counter (which gets decremented at the frequency of the oscillator to produce the “seconds”) will start at a different value than 32768. Adding 1 to this counter every 20s would basically mean earning 1 / (32768 * 20) = 1526 ppb. Our target being 9155 ppb, we must offset the counter by 9155 / 1526 = 6 every 20s to get a compensated rate of 32767.7 + (6 / 20) = 32768 Hz.
Upstreaming status of the RZ/N1 RTC driver
The RZ/N1 RTC driver has all the features listed above and made its way into the v5.18 Linux kernel release. Hopefully this little reference sheet will encourage others to finalize and send new RTC drivers upstream!
During the same week, also in Dublin albeit in a different location, will take place the Linux Plumbers conference. Bootlin engineer Miquèl Raynal will give a talk at Linux Plumbers, as part of the IoTs a 4-Letter Word micro-conference. Miquèl’s talk will discuss Linux IEEE 802.15.4 MLME improvements, as Miquèl has been working for several months on bringing improvements to the 802.15.4 stack in the Linux kernel.
Linux 5.19 has been released yesterday. We recommend the usual resources of LWN (part 1 and part 2) as well as KernelNewbies to get some high-level overview of the major additions. CNX-Software also has an article focused on the ARM/RISC-V/MIPS improvements.
At Bootlin, we contributed 68 patches to this release, the main highlights being:
Clément Léger contributed patches for the Microchip SAMA5 platform to support suspend operation while running in non-secure mode, with OP-TEE handling the necessary PCSI calls. This is related to our work to port OP-TEE on Microchip SAMA5D2, which we have covered in severalblogposts before.
Hervé Codina contributed device Tree updates to enable the PCI controller of the Renesas RZ/N1 platform, which allows to access the USB host controller that sits on an internal PCI bus. Some driver updates for the PCI driver are needed, and they will land in 5.206.0 kernel.
Miquèl Raynal contributed several improvements to the IIO subsystem, following his work on several IIO drivers and his related blog post. These improvements either touch the core IIO, or fix some incorrect API use in IIO drivers.
Miquèl Raynal contributed a new driver for the Renesas RZ/N1 DMA router (in drivers/dmaengine) as well as a new driver for the Renesas RZ/N1 Real Time Clock (in drivers/rtc). In addition, Miquèl modified the 8250 UART controller driver to be able to use the DMA capabilities available on the RZ/N1 processor.
Miquèl Raynal also contributed a number of improvements to the IEEE 802.15.4 stack in the Linux kernel.
Paul Kocialkowski contributed support for MIPI CSI-2 in the Allwinner phy-sun6i-mipi-dphy driver.
Paul Kocialkowski and Luca Ceresoli contributed a few misc fixes, touching the SPI core and SPI Rockchip driver and the dmaengine documentation.
Let’s jump right in! In the previous article, we went through a theoretical overview of PipeWire. Our goal will now be to install and configure a minimal Linux-based system that runs PipeWire in order to output audio to an ALSA sink. The hardware for this demo will be a SAMA5D3 Xplained board and a generic USB sound card (a Logitech USB Headset H340 in our case, as reported by /sys/bus/usb/devices/MAJOR-MINOR/product).
We will rely on Buildroot for the root filesystem, and compile our Linux kernel outside Buildroot for ease of development. In the chronological order, here are the steps we’ll follow:
Download Buildroot and configure it. This step will provide us with two things: a cross-compiling toolchain and a root filesystem. We will use a pre-compiled toolchain as compiling a GCC toolchain is a slow process.
Download, configure and build the kernel. This will require small tweaks to ensure the right drivers are compiled-in. We will rely upon the Buildroot-provided toolchain, which will make allow our project to be self-contained and reduce the number of dependencies installed system-wide. This also leads to a more reproducible routine.
Boot our board; this requires a kernel image and a root filesystem. We’ll rely upon U-Boot’s TFTP support to retrieve the kernel image and Linux’s NFS support for root filesystems to allow for quick changes.
Iterate on 1, 2 and 3 as needed! We might want to change kernel options or add packages to our root filesystem.
Feel free to skip the steps that are not required for you if you plan to follow along, this probably assumes some small configuration changes here and there on your side.
Buildroot: toolchain & root filesystem
Let’s start with Buildroot:
$ export WORK_DIR=PATH/TO/WORKING/DIRECTORY/
$ cd $WORK_DIR
# Download and extract Buildroot
$ export BR2_VERSION=2022.02
$ wget "https://buildroot.org/downloads/buildroot-$BR2_VERSION.tar.gz"
$ tar xf buildroot-$BR2_VERSION.tar.gz
$ mv buildroot-$BR2_VERSION buildroot
# Hop into the config menu
$ cd buildroot
$ make menuconfig
# nconfig, xconfig and gconfig are also available options
It’s config time! We’ll use a pre-compiled glibc-based toolchain.
In “Target options”:
“Target architecture” should be “ARM (little endian)” (BR2_arm symbol);
“Target architecture variant” should be “cortex-A5” (BR2_cortex_a5);
“Enable VFP extension support” should be true (BR2_ARM_ENABLE_VFP);
In “Toolchain”:
“Toolchain type” should be “External toolchain” (BR2_TOOLCHAIN_EXTERNAL);
“Toolchain” should be “Bootlin toolchains” (BR2_TOOLCHAIN_EXTERNAL_BOOTLIN);
“Bootlin toolchain variant” should be “armv7-eabihf glibc stable 2021.11-1” (BR2_TOOLCHAIN_EXTERNAL_BOOTLIN_ARMV7_EABIHF_GLIBC_STABLE);
“Copy gdb server to the target” can be set to true, this might come in useful in such experiments (BR2_TOOLCHAIN_EXTERNAL_GDB_SERVER_COPY).
In “Build options”, various options could be modified based on preferences: “build packages with debugging symbols”, “build packages with runtime debugging info”, “strip target binaries” and “gcc optimization level”.
In “System configuration”, the root password can be defined (BR2_TARGET_GENERIC_ROOT_PASSWD symbol). Changing this from the default empty password will allow us to login using SSH.
In “Target packages”, we’ll list them using symbol names as that is easier to search:
BR2_PACKAGE_ALSA_UTILS with its APLAY option, to enable testing devices directly using ALSA;
From this article’s introduction, we know that we still need a session manager to go along with PipeWire. Both pipewire-media-session and WirePlumber are packaged by Buildroot but we’ll stick with WirePlumber as its the recommended option. At the place it should appear in the menuconfig is a message that tells us that we are missing dependencies:
*** wireplumber needs a toolchain w/ wchar, threads and Lua >= 5.3 ***
If in doubt of what causes this message to appear as it lists multiple dependencies, we can find the exact culprit by searching for the BR2_PACKAGE_WIREPLUMBER symbol in menuconfig, which tells us on which symbols WirePlumber depends on:
The depends on entry tells us the boolean expression that needs to be fullfilled for BR2_PACKAGE_WIREPLUMBER to be available. Next to each symbol name is its current value in square brackets.
Note: this process could have been done manually, by looking for the WirePlumber symbol definition in buildroot/package/wireplumber/Config.in and grepping our current .config, seeing what was missing.
The conclusion is that we are missing Lua, which is the scripting used throughout WirePlumber. Enabling BR2_PACKAGE_LUA makes the BR2_PACKAGE_WIREPLUMBER option available, which we enable.
In the Buildroot version we selected, the WirePlumber package lists PACKAGE_DBUS as an unconditional dependency in the WIREPLUMBER_DEPENDENCIES variable, in package/wireplumber/wireplumber.mk. However, WirePlumber can be built fine without it and we therefore need to remove it manually to build successfully our image. This has been fixed for upcoming Buildroot versions.
As often in Buildroot, packages have optional features that get enabled if dependencies are detected. make menuconfig won’t tell us about those, the best way is to browse the package/$PKG/$PKG.mk files for $PKG that interests us and see what gets conditionnally enabled. By visiting PipeWire’s and WirePlumber’s makefiles, we can see that we might want to enable:
BR2_PACKAGE_DBUS for various D-Bus-related features which we have explored in the first article; this allows building the SPA D-Bus support plugin relied upon by both PipeWire and WirePlumber, which explains why WirePlumber doesn’t directly depend upon D-Bus;
BR2_PACKAGE_HAS_UDEV to support detection of events on ALSA, V4L2 and libcamera devices;
BR2_PACKAGE_SYSTEMD for systemd unit files to get generated and systemd-journald support (logging purposes);
BR2_PACKAGE_ALSA_LIB for ALSA devices support (which also requires BR2_PACKAGE_ALSA_LIB_{SEQ,UCM} and BR2_PACKAGE_HAS_UDEV);
BR2_PACKAGE_AVAHI_LIBAVAHI_CLIENT for network discovery in various PipeWire modules: search for the avahi_dep symbol in PipeWire’s meson.build files for the list;
BR2_PACKAGE_NCURSES_WCHAR to build the pw-top monitoring tool;
BR2_PACKAGE_LIBSNDFILE to build the pw-cat tool (equivalent of alsa-tools’ aplay);
and a few others.
One option that needs discussion is the BR2_PACKAGE_HAS_UDEV. It is required to have the -Dalsa=enabled option at PipeWire’s configure step. As can be seen in PipeWire’s spa/meson.build, this option enforces that ALSA support gets built:
This line seems to indicate that to have ALSA support, we could simply add ALSA as a dependency and rely on the fact that the build system will find it. However, later on in the same Meson build file, we notice:
libudev_dep = dependency(
'libudev',
required: alsa_dep.found() or
get_option('udev').enabled() or
get_option('v4l2').enabled())
This line means that if the ALSA dependency is found, the libudev dependency is required which would lead to a failing build if we don’t have udev support.
As we expect ALSA support, we’ll make sure BR2_PACKAGE_HAS_UDEV is enabled. To find out what provides this config entry, the easiest way is a search through Buildroot for the select BR2_PACKAGE_HAS_UDEV string, which returns two results:
We’ll stick with eudev and avoid importing the whole of systemd in our root filesystem. To do so, we tell Buildroot to use eudev for /dev management in the “System configuration” submenu (the BR2_ROOTFS_DEVICE_CREATION_DYNAMIC_EUDEV symbol, which automatically selects BR2_PACKAGE_EUDEV).
In turn, PipeWire’s build configuration automatically enables some options if specific dependencies are found. That is why the package/pipewire/pipewire.mk file has sections such as:
That means pw-top will get built if ncursesw is found; for ncurses the trailing w means wide.
In our specific case, two tools that get conditionally built interest us: pw-top and pw-cat (and its aliases pw-play, pw-record, etc.). The first one will help us monitor the state of active nodes (their busy time, time quantum, etc.) and the second one is capable of playing an audio file by creating a PipeWire source node; it’s the equivalent of aplay, arecord, aplaymidi and arecordmidi. We therefore enable BR2_PACKAGE_NCURSES, BR2_PACKAGE_NCURSES_WCHAR and BR2_PACKAGE_LIBSNDFILE.
One last thing: let’s include an audio test file in our root filesystem image, for easy testing later on. We’ll create a root filesystem overlay directory for this:
$ cd $WORK_DIR
# Create an overlay directory with a .WAV example file
$ mkdir -p overlay/root
# This file is available under a CC BY 3.0 license, see:
# https://en.wikipedia.org/wiki/File:Crescendo_example.ogg
$ wget -O example.ogg \
"https://upload.wikimedia.org/wikipedia/en/6/68/Crescendo_example.ogg"
# aplay only supports the .voc, .wav, .raw or .au formats
$ ffmpeg -i example.ogg overlay/root/example.wav
$ rm example.ogg
# Set BR2_ROOTFS_OVERLAY to "../overlay"
# This can be done through menuconfig as well
$ sed -i 's/BR2_ROOTFS_OVERLAY=""/BR2_ROOTFS_OVERLAY="..\\/overlay"/' \
buildroot/.config
We now have a Buildroot configuration that includes BusyBox for primitive needs, Dropbear as an SSH server, PipeWire and its associated session manager WirePlumber, with automatic /dev management and tools that will help us in our tests (aplay and pw-play for outputting audio and pw-top to get an overview on PipeWire’s state). WirePlumber comes with a tool called wpctl that gets unconditionally built. make can be run in Buildroot’s folder so that both the cross-compiling toolchain and the root filesystem get generated and put into Buildroot’s output folder; see the manual for more information about Buildroot’s output/ directory. The toolchain’s GCC and binutils programs in particular can be accessed in output/host/bin/, all prefixed with arm-linux-.
Linux kernel
As we now have an available toolchain, we can go ahead by fetching, configuring and compiling the kernel:
# Download and extract the Linux kernel
$ export LINUX_VERSION=5.17.1
$ wget "https://cdn.kernel.org/pub/linux/kernel/v5.x/linux-$LINUX_VERSION.tar.xz"
$ tar xf linux-$LINUX_VERSION.tar.xz
$ mv linux-$LINUX_VERSION linux
If we compile the kernel as such, it wouldn’t know what our target architecture is and what toolchain to use (it would use what can be found in our $PATH environment variable, which is most probably not right). We therefore need to inform it using three environment variables:
Update the $PATH to add access to the recently-acquired toolchain, the one available in Buildroot’s output/host/bin/;
Set the $ARCH to the target’s architecture, that is arm in our case;
Set $CROSS_COMPILE to the prefix on our binutils tools, arm-linux- in our scenario.
To avoid forgetting those every time we interact with the kernel’s build system, we’ll use a small script that throws us into a shell with the right variables:
#!/bin/sh
# Make sure $WORK_DIR is absolute
export WORK_DIR=$(dirname $(realpath $0))
export PATH="$WORK_DIR/buildroot/output/host/bin:$PATH"
export ARCH=arm
export CROSS_COMPILE=arm-linux-
This script will be called kernel.sh from now on.
We can now configure our kernel, using the SAMA5 defconfig as groundwork:
$ source kernel.sh
$ cd linux
$ make sama5_defconfig
$ make menuconfig
In “General setup”:
Set “Kernel compression mode” to “LZO” (optional, CONFIG_KERNEL_LZO symbol);
Set “Preemption model” to “Preemptible kernel” for a-bit-better latencies (optional, CONFIG_PREEMPT symbol); if low-latency audio is necessary the PREEMPT_RT patch is probably the first step, along with many other configuration tweaks; Bootlin’s PREEMPT_RT training might be of use;
Enable the CONFIG_SND_USB_AUDIO option, for support of USB sound cards in ALSA.
It’s time for compilation using make, without forgetting the -jN option to allow N simultaneous jobs.
Booting our board
We can now boot the kernel on our SAMA5D3 Xplained board. On the host side, that requires prepping a TFTP server with both the kernel image and the device tree binary as well as a NFS server (using the Linux kernel NFS server) for the root filesystem:
# Export the kernel image and device tree binary to the TFTP's
# root folder
$ sudo cp \
linux/arch/arm/boot/{zImage,dts/at91-sama5d3_xplained.dtb} \
/var/lib/tftpboot
# Create the root filesystem folder
$ mkdir rootfs
# Extract it from Buildroot's output
$ tar xf buildroot/output/images/rootfs.tar -C rootfs
# Allow read/write access to IP 192.168.0.100
$ echo "$WORK_DIR/rootfs 192.168.0.100(rw,no_root_squash,no_subtree_check)" \
| sudo tee -a /etc/exports
# Tell the NFS server about our changes to /etc/exports
$ sudo exportfs -a
Do not forget to configure your host’s network interface to use a static IP and routing table, with a command such as the following:
nmcli con add type ethernet ifname $DEVICE_NAME ip4 192.168.0.1/24
On the target side, we configure U-Boot’s network stack, boot command and boot arguments.
# Connect to the board using a serial adapter
$ picocom -b 115200 /dev/ttyUSB0
# In U-Boot's command line interface:
=> env default -a
=> env set ipaddr 192.168.0.100
=> env set serverip 192.168.0.1
=> env set ethaddr 00:01:02:03:04:05
=> env set bootcmd "tftp 0x21000000 zImage ;
tftp 0x22000000 at91-sama5d3_xplained.dtb ;
bootz 0x21000000 - 0x22000000"
=> # $WORK_DIR has to be substituted manually
=> env set bootargs "console=ttyS0 root=/dev/nfs
nfsroot=192.168.0.1:$WORK_DIR/rootfs,nfsvers=3,tcp
ip=192.168.0.100:::::eth0 rw"
=> env save
=> boot
Outputting audio
That leads to a successful kernel boot! Once connected through SSH we can start outputting sound, first using ALSA directly:
# The password comes from BR2_TARGET_GENERIC_ROOT_PASSWD
$ ssh root@192.168.0.100
$ aplay -l
**** List of PLAYBACK Hardware Devices ****
card 0: H340 [Logitech USB Headset H340], device 0: USB Audio [USB Audio]
Subdevices: 1/1
Subdevice #0: subdevice #0
$ cd /root
$ aplay example.wav
Playing WAVE 'example.wav' : Signed 16 bit Little Endian, Rate 44100 Hz, Mono
It’s time to start fiddling with PipeWire. The current Buildroot packaging for PipeWire and WirePlumber do not provide scripts for starting using the BusyBox init system’s scripts; it provides service and socket systemd units if that is what is used. We’ll have to start them both manually. Naively running pipewire won’t work but it will make the issue explicit:
$ pipewire
[W][00120.281504] pw.context | [ context.c: 353 pw_context_new()] 0x447970: can't load dbus library: support/libspa-dbus
[E][00120.313251] pw.module | [ impl-module.c: 276 pw_context_load_module()] No module "libpipewire-module-rt" was found
[E][00120.318522] mod.protocol-native | [module-protocol-: 565 init_socket_name()] server 0x460aa8: name pipewire-0 is not an absolute path and no runtime dir found. Set one of PIPEWIRE_RUNTIME_DIR, XDG_RUNTIME_DIR or USERPROFILE in the environment
[E][00120.320760] pw.conf | [ conf.c: 559 load_module()] 0x447970: could not load mandatory module "libpipewire-module-protocol-native": No such file or directory
[E][00120.322600] pw.conf | [ conf.c: 646 create_object()] can't find factory spa-node-factory
The daemon, during startup, tries to create the UNIX socket that will be used by clients to communicate with it; its default name is pipewire-0. However, without specific environment variables, PipeWire does not know where to put it. The fix is therefore to invocate pipewire with the XDG_RUNTIME_DIR variable set:
$ XDG_RUNTIME_DIR=/run pipewire
[W][03032.468669] pw.context | [ context.c: 353 pw_context_new()] 0x507978: can't load dbus library: support/libspa-dbus
[E][03032.504804] pw.module | [ impl-module.c: 276 pw_context_load_module()] No module "libpipewire-module-rt" was found
[E][03032.530877] pw.module | [ impl-module.c: 276 pw_context_load_module()] No module "libpipewire-module-portal" was found
Some warnings still occur, but they do not block PipeWire in its process:
The first line is to be expected, as we compiled PipeWire without D-Bus support.
The second one is because the default configuration invokes a PipeWire module that makes the daemon process realtime using setpriority(2) and threads using pthread_setschedparam(3) with SCHED_FIFO. This module, until recently, was not getting compiled if D-Bus support wasn’t available as it had a fallback upon RTKit (D-Bus RPC to ask for augmented process priority, used to avoiding giving the privileges to every process). This is fixed in newer versions as the module is now being compiled without RTKit fallback if D-Bus is not available, but the stable Buildroot version we are using is packaging an older version of PipeWire.
The third one refers to portal as in xdg-desktop-portal, a D-Bus based interface to expose various APIs to Flatpak applications. This does not matter to us for an embedded use.
The default PipeWire’s daemon configuration can be overridden to remove those warnings: support.dbus in context.properties controls the loading of the D-Bus library, and modules to be loaded are declared in context.modules. The default configuration is located at /usr/share/pipewire/pipewire.conf and a good way to override is it to touch a file with the same name in /etc/pipewire.
Tip: PipeWire’s logging is controlled using the PIPEWIRE_DEBUG environment variable, as described in the documentation.
We can therefore use various PipeWire clients and connect to the daemon: XDG_RUNTIME_DIR=/run pw-top should display both the dummy and freewheel drivers doing nothing, and XDG_RUNTIME_DIR=/run pw-dump gives us a JSON of the list of objects in PipeWire’s global registry.
The reason we do not see our ALSA PCM device is that PipeWire is not responsible for monitoring /dev and adding new nodes to the graph; that is our session manager’s responsability. WirePlumber’s configuration needs to be updated from the default to avoid it crashing because of the lack of a few optional dependencies. To update it, the recommended way is the same as for PipeWire: by overloading the configuration file with one located in /etc/wireplumber. Here are the issues with a default config:
It expects the SPA bluez library which has as unconditional dependencies libm, dbus, sbc and bluez. It therefore does not get built and cannot be found at runtime by WirePlumber. wireplumber.conf has a { name = bluetooth.lua, type = config/lua } component, which should be commented out to disable Bluetooth support.
v4l2 support, through the SPA v4l2 library, has not been built. This can be enabled using the BR2_PACKAGE_PIPEWIRE_V4L2 flag. Disabling the v4l2 monitor requires not calling the v4l2_monitor.enable(), which needs to be commented out in /usr/share/wireplumber/main.lua.d/90-enable-all.lua (Lua’s comments start with two dashes).
The ALSA monitor tries to reserve ALSA devices using the org.freedesktop.ReserveDevice1 D-Bus-based protocol.
Similarly to PipeWire’s libpipewire-module-portal, WirePlumber has support for Flatpak’s portal, which needs to be disabled as it relies on DBus.
The last two issues can be solved by using the following Lua configuration script, in /etc/wireplumber/main.lua.d/90-disable-dbus.lua:
The remaining warning can be gotted rid of by setting support.dbus = false in the context.properties section of WirePlumber’s primary configuration.
Tip: those modifications can be added to our filesystem overlay for persistance accross rebuilds of our root filesystem image.
That’s it! WirePlumber now has detected our ALSA sink and source, adding them as nodes to the PipeWire graph. It will detect source nodes that we add to the graph and will link them to the ALSA sink node, outputting audio for our ears to enjoy.
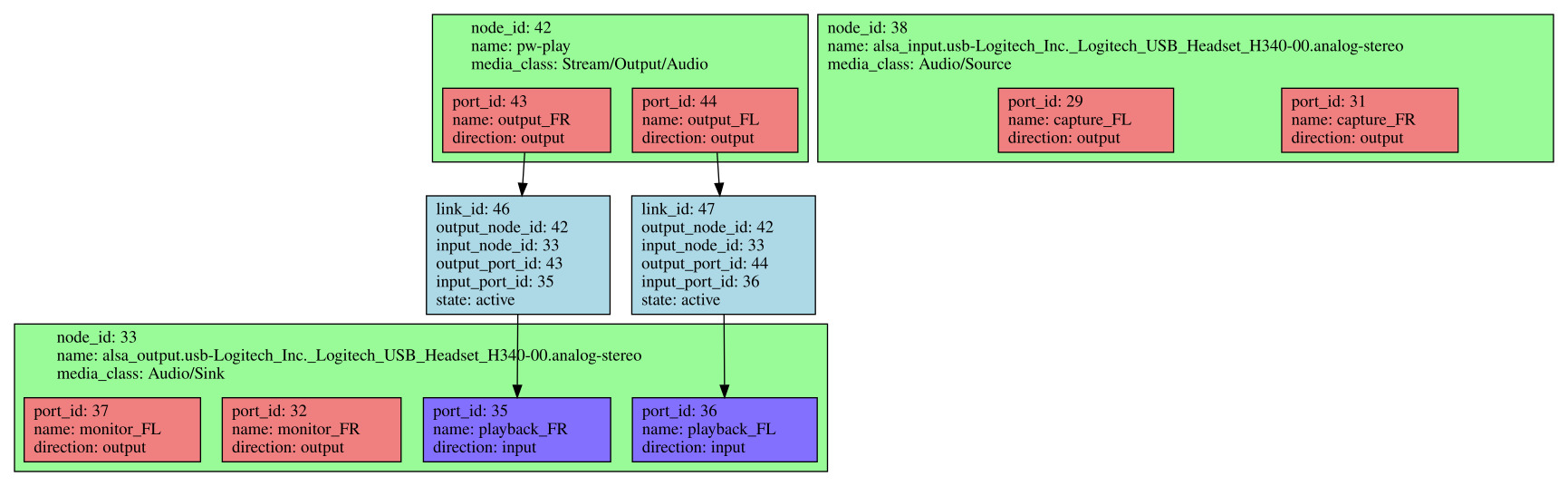
pw-dot, called without any argument, will generate a pw.dot file that represents the active nodes, their ports and the links in the current graph. A .dot file is a textual description of a graph which can be turned graphical using a tool from the Graphviz project. It is simpler to install Graphviz on your host PC, using your favorite package manager, and copy the pw.dot file from the target to the host (a simple local copy as we are using an NFS root filesystem). A SVG file can then be generated as such:
dot -Tsvg pw.dot > pw.svg
Here is what the graph looks like when audio is being outputted using a single source:
PipeWire graph generated by pw-dot, click to see in full size
Conclusion
We have managed to create a rather bare image, with WirePlumber monitoring ALSA devices and adding them as devices and nodes to the PipeWire graph. WirePlumber automatically creates links between source nodes and the default sink node, which means that audio is outputted.
The next step is to create our own custom PipeWire source node. We’ll be able to use the PipeWire API through libpipewire and see what information and capabilities it exposes relative to the overall graph.
This blog post is the first part of a series of 3 articles related to the PipeWire project and its usage in embedded Linux systems.
Introduction
PipeWire is a graph-based processing engine, that focuses on handling multimedia data (audio, video and MIDI mainly).
It has gained steam early on by allowing screen sharing on Wayland desktops, which for security reasons, does not allow an application to access any framebuffer that does not concern it. The PipeWire daemon was run with sufficient privileges to access screen data; giving access through a D-Bus service to requesting applications, with file-descriptor passing for the actual video transfer. It was as such bundled in the Fedora distribution, version 27.
Later on, the idea was to expand this to also allow handling audio streams in the processing graph. Big progress has been done by Wim Taymans on this front, and PipeWire is now the default sound server of the desktop Fedora distribution, since version 34.
The project is currently in active development. It happens in the open, lead by Wim Taymans. The API and ABI can both be considered stable, even though version 1.0 has not been released yet. The changelog exposes very few breaking changes (two years without one) and many bug fixes. It is developed in C, using a Meson and Ninja based build system. It has very few unconditional runtime dependencies, but we’ll go through those during our first install.
Throughout this series of blog articles, our goal will be to discover PipeWire and the possiblities it provides, focusing upon audio usage on embedded platforms. A detailed theoretical overview at the start will allow us to follow up with a hands-on approach. Starting with a minimal Buildroot setup on a Microchip SAMA5D3 Xplained board, we will create then our own custom PipeWire source node. We will then study how dynamic, low-latency routing can be done. We’ll end with experiments regarding audio-over-ethernet.
A note: we will start with many theoretical aspects, that are useful to get a good mental model of the way PipeWire works and how it can be used to implement any wanted behavior. This introduction might therefore get a little exhaustive at times, and it could be a good approach to skip even if a concept isn’t fully grasped, to come back later during hands-ons when details on a specific subject is required.
Sky-high overview
A PipeWire graph is composed of nodes. Each node takes an arbitrary number of inputs called ports, does some processing over this multimedia data, and sends data out of its output ports. The edges in the graph are here called links. They are capable of connecting an output port to an input port.
Nodes can have an arbitrary number of ports. A node with only output ports is often called a source, and a sink is a node that only possesses input ports. For example, a stereo ALSA PCM playback device can be seen as a sink with two input ports: front-left and front-right.
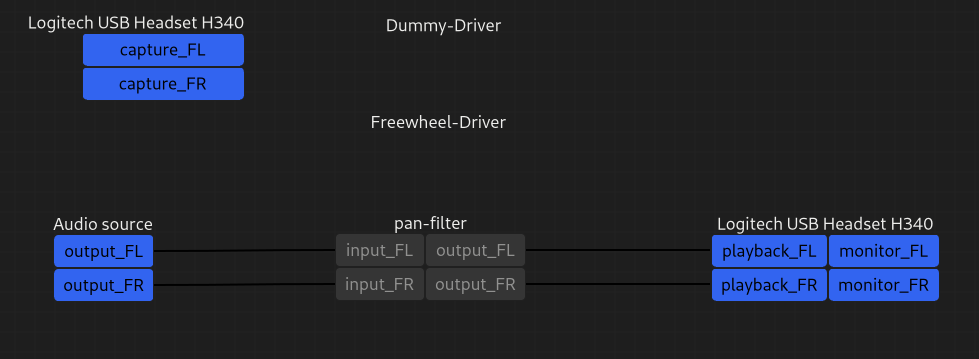
Here is a visual representation of a PipeWire graph instance, provided by the Helvum GTK patchbay:
Screenshot provided by the Helvum project
Visual attributes are used in Helvum to describe the state of nodes, ports and links:
Node names are in white, with their ports being underneath the names. Input ports are on the left while output ports are on the right.
“Dummy-Driver” and “Freewheel-Driver” nodes have no ports. Those two are particular sinks (with dynamic input ports, that appear when we connect a node to them) used in specific conditions by PipeWire.
Red means MIDI, yellow means video and blue means audio.
Links are solid when active (data is “passing-through” them) and dashed when in a paused state.
Note: if your Linux desktop is running PipeWire, trying installing Helvum to graphically monitor and edit your multimedia graph! It is currently packaged on Fedora, Arch Linux, Flathub, crates.io and others.
Design choices
There are a few noticeable design choices that explain why PipeWire is being adopted for desktop and embedded Linux use cases.
Session and policy management
One first design choice was to avoid tackling any management logic directly inside PipeWire; context-dependent behaviour such as monitoring for new ALSA devices, and configuring them so that they appear as nodes, or automatically connecting nodes using links is not handled. It rather provides an API that allows spawning and controlling those graph objects. This API is then relied upon by client processes to control the graph structure, without having to worry about the graph execution process.
A pattern that is often used and is recommended is to have a single client be a daemon that deals with the whole session and policy management. Two implementations are known as of today:
pipewire-media-session, which was the first implementation of a session manager. It is now called an example and used mainly in debugging scenarios.
WirePlumber, which takes a modular approach: it provides another, higher-level API compared to the PipeWire one, and runs Lua scripts that implement the management logic using the said API. In particular, this session manager gets used in Fedora since version 35. It ships with default scripts and configuration that handle linking policies as well as monitoring and automatic spawning of ALSA, bluez, libcamera and v4l2 devices. The API is available from any process, not only from WirePlumber’s Lua scripts.
Individual node execution
As described above, the PipeWire daemon is responsible for handling the proper processing of the graph (executing nodes in the right order at the right time and forwarding data as described by links) and exposing an API to allow authorized clients to control the graph. Another key point of PipeWire’s design is that the node processing can be done in any Linux process. This has a few implications:
The PipeWire daemon is capable of doing some node processing. This can be useful to expose a statically-configured ALSA device to the graph for example.
Any authorized process can create a PipeWire node and be responsible for the processing involved (getting some data from input ports and generating data for output ports). A process that wants to play stereo audio from a file could create a node with two output ports.
A process can create multiple PipeWire nodes. That allows one to create more complex applications; a browser would for example be able to create a node per tab that requests the ability to play audio, letting the session manager handle the routing: this allows the user to route different tab sources to different sinks. Another example would be an application that requires many inputs.
API and backward compatibility
As we will see later on, PipeWire introduces a new API that allows one to read and write to the graph’s overall state. In particular, it allows one to implement a source and/or sink node that will be handling audio samples (or other multimedia data).
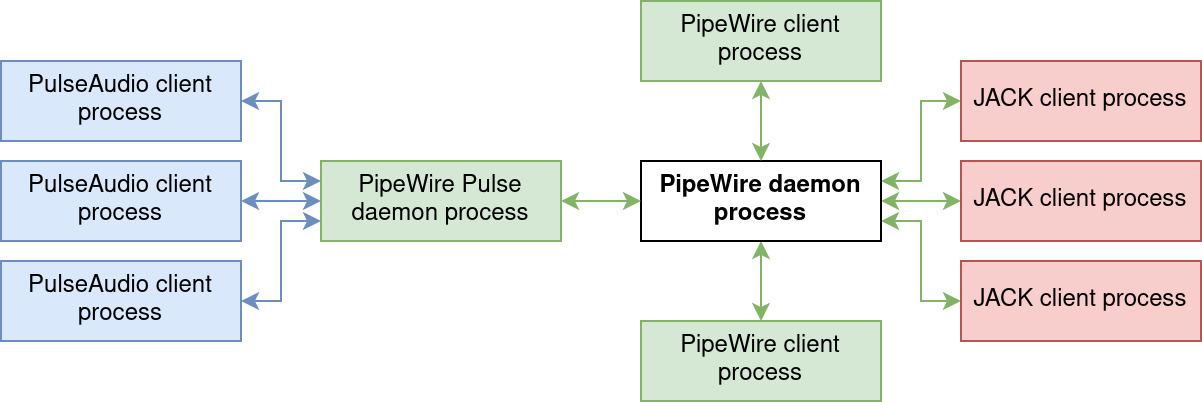
One key point for PipeWire’s quick adoption is a focus on providing a shim layer to currently-widespread audio API in the Linux environment. That is:
It can obviously expose ALSA sinks or sources inside the graph. This is at the heart of what makes PipeWire useful: it can interact with local audio hardware. It uses alsa-lib as any other ALSA client. PipeWire is also capable of creating virtual ALSA sinks or sources, to interface with applications that rely solely upon the alsa-lib API.
It can implement the PulseAudio API in place of PulseAudio itself. This simply requires starting a second PipeWire daemon, with a specific pulse configuration. Each PulseAudio sink/source will appear in the graph, as if native. PulseAudio is the main API used by Linux desktop users and this feature allows PipeWire to be used as a daily-driver while supporting all standard applications. An anecdote: relying on the PulseAudio API is still recommended for simple audio applications, for its more widespread and simpler API.
It also implements the JACK Audio Connection Kit (or JACK); this API has been in use by the pro-audio audience and targets low-latency for audio and MIDI connections between applications. This requires calling JACK-based applications using pw-jack COMMAND, which does the following according to its manual page:
pw-jack modifies the LD_LIBRARY_PATH environment variable so that applications will load PipeWire’s reimplementation of the JACK client libraries instead of JACK’s own libraries. This results in JACK clients being redirected to PipeWire.
Schema illustrating the way PulseAudio and JACK applications are supported
About compatibility with Linux audio standards, the PipeWire FAQ has an interesting answer to the expected question whenever something new appears: why another audio standard, Linux already has 13 of them? For exhaustiveness, here is a quick rundown of the answer: it describes how Linux has one kernel audio subsystem (ALSA) and only two userspace audio servers: PulseAudio and JACK. Others are either frameworks relying on various audio backends, dead projects or wrappers around audio backends. PipeWire’s goal, on the audio side, is to provide an alternative to both PulseAudio and JACK.
Real-time execution: push or pull?
In the simple case of a producer and a consumer of data, two execution models are in theory possible:
Push, where the producer generates data when it can into a shared buffer, from which the consumer reads. This is often associated with blocking writes to signal the producer when the buffer is full.
Pull, where the producer gets signaled when data is needed for the consumer, at which point the producer should generate data as fast as possible into the given shared buffer.
In a real-time case scenario, latency is optimal when the data quantity in the shared buffer is minimised: when the producer adds data to the buffer, all the data already present in the buffer needs to be consumed before the new data gets processed as well. As such, the pull method allows the system to monitor the shared buffer state and signal the producer before the shared buffer gets empty; this guarantees data that is as up-to-date as possible as it was generated as late as possible.
That was for a generic overview of pushed versus pulled communication models. PipeWire adopts the pull model as it has low latencies as a goal. Some notes:
The structure is more complex compared to a single producer and single consumer architecture, as there can be many more producers and consumers, possibly with nodes depending on multiple other nodes.
The PipeWire daemon handles the signaling of nodes. Those get woken up, fill a shared memory buffer and pass it onto its target nodes; those are the nodes that take its output as an input (as described by link objects).
The concept of driver nodes is introduced; other nodes are called followers. For each component (subgraph of the whole PipeWire graph), one node is the driver and is responsible for timing information. It is the one that signals PipeWire when a new execution cycle is required. For the simple case of an audio source node (the producer) and an ALSA sink node (the consumer), the ALSA sink will send data to the hardware according to a timer, signaling PipeWire to start a new cycle when it has no more data to send: it pulls data from the graph by telling it that it needs more.
Note: in this simple example, the buffer size provided to ALSA by PipeWire determines the time we have to generate new data. If we fail to execute the entire graph in time before the timer, the ALSA sink node will have no data and this will lead to an underrun.
Implementation overview
This introduction and the big design decisions naturally lead us to have a look at the actual implementation concepts. Here are the questions we will try to answer:
How is the graph state represented?
How can a client process get access to the graph state and make changes?
How is IPC communication handled?
Graph state representation: objects, objects everywhere
As said previously, PipeWire’s goal is to maintain, execute and expose a graph-structured multimedia execution engine. The graph state is maintained by the PipeWire daemon, which runs the core object. A fundamental principle is the concept of an object. Clients communicate with the core using IPC, and can create objects of various types, which can then be exported. Exporting an object means telling the core and its registry about it, so that the object becomes a part of the graph state.
Every object have at least the following: a unique integer identifier, some permissions flags for various operations, an object type, string key-value pairs of properties, methods and event types.
Object types
There is a fixed type list, so let’s go through the main existing types to understand the overall structure better:
The core is the heart of the PipeWire daemon. There can only be one core per graph instance and it has the identifier zero. It maintains the registry, which has the list of exported objects.
A client object is the representation of an open connection with a client process, from within the daemon process.
A module is a shared object that is used to add functionality to a PipeWire client. It has an initialisation function that gets called when the module gets loaded. Modules can be loaded in the core process or in any client process. Clients do not export to the registry the modules they load. We’ll see examples of modules and how to load them later on.
A node is a producer and/or consumer of data; its main characteristic is to have input and output port objects, which can be connected using link objects to create the graph structure.
A port belongs to a node and represents an input or output of data. As such, it has a direction, a data format and can have a channel position if it is audio data that is being transferred.
A link object connects two ports of opposite direction together; it describes a graph edge.
A device is a handle representing an underlying API, which is then used to create nodes or other devices. Examples of devices are ALSA PCM cards or V4L2 devices. A device has a profile, which allows one to configure them.
A factory is an object whose sole capability is to create other objects. Once a factory is created, it can only emit the type of object it declared. Those are most often delivered as a module: the module creates the factory and stays alive to keep it accessible for clients.
A session object is supposed to represent the session manager, and allow it to expose APIs through the PipeWire communication methods. It is not currently used by WirePlumber but this is planned.
An endpoint is the concept of a (possibly empty) grouping of nodes. Associated with endpoint streams and links, they can represent a higher-level graph that is handled by the session manager. Those would allow modeling complex behaviors such as mutually-exclusive sinks (think laptop speakers and line-out port) or nodes to which PipeWire cannot send audio streams, such as analog peripherals for which the streams do not go through the CPU. Those peripherals would therefore appear in the graph, be controlled with the same API (routing using links, setting volume, muting, etc.) but the processing would be done outside PipeWire’s reach. See PipeWire’s documentation for more information on the potential of those advanced features.
Permissions
The session and policy manager (most often WirePlumber) is also responsible for defining the list of permissions each client has. Each permission entry is an object ID and four flags. A special PW_ID_ANY ID means that those permissions are the default, to be used if a specific object is not described by any other permission. Here are the four flags:
Read: the object can be seen and events can be received;
Write: the object can be modified, usually through methods (which requires the execute flag);
eXecute: methods can be called;
Metadata: metadata can be set on the object.
This isn’t well leveraged upon yet, as all clients get default permissions of rwxm: read, write, execute, metadata.
Properties
All objects also have properties attributed to them, which is a list of string key-value pairs. Those are abitrary and various keys are expected for various object types. An example link object has the following properties (as reported by pw-cli info LINK_ID):
# Link ID
object.id = "95"
# Source port
link.output.node = "91"
link.output.port = "93"
# Destination port
link.input.node = "80"
link.input.port = "86"
# Client that created the link
client.id = "32"
# Factory that was called to create the link
factory.id = "20"
# Serial identifier: an incremental identifier that guarantees no
# duplicate across a single instance. That exists because standard
# IDs get reused to keep them user-friendly.
object.serial = "677"
Parameters
Some object types also have parameters (often abbreviated as params), which is a fixed-length list of parameters that the object possesses, specific to the object type. Currently, nodes, ports, devices, sessions, endpoints and endpoint streams have those. Those params have flags that define if they can be read and/or written, allowing things like constant parameters defined at the object creation.
Parameters are the key that allow WirePlumber to negotiate data formats and port configuration with nodes: hardware that supports multiple sample rates? channel count and positions? sample format? enable monitor ports? etc. Nodes expose enumerations of what they are capable of, and the session manager writes the format/configuration it chose.
Methods & events
An object’s implementation is defined by its list of methods. Each object type has a list of methods that it needs to implement. One note-worthy method is process, that can be found on nodes. It is the one that eats up data from input ports and provides data for each output port.
Every object implement at least the add_listener method, that allows any client to register event listeners. Events are used through the PipeWire API to expose information about an object that might change over time (the state of a node for example).
Exposing the graph to clients: libpipewire and its configuration
Once an object is created in a process, it can be exported to the core’s registry so that it becomes a part of the graph. Once exported, an object is exposed and can be accessed by other clients; this leads us into this new section: how clients can get access and interact with the graph.
The easiest way to interact with a PipeWire instance is to rely upon the libpipewire shared object library. It is a C library that allows one to connect to the core. The connection steps are as follows:
Initialise the library using pw_init, whose main goal is to setup logging.
Create an event-loop instance, of which PipeWire provides multiple implementations. The library will later plug into this event-loop to register event listeners when requested.
Create a PipeWire context instance using pw_context_new. The context will handle the communication process with PipeWire, adding what it needs to the event-loop. It will also find and parse a configuration file from the filesystem.
Connect the context to the core daemon using pw_context_connect. This does two things: it initialises the communication method and it returns a proxy to the core object.
Proxies
A proxy is an important concept. It gives the client a handle to interact with a PipeWire object which is located elsewhere but which has been registered in the core’s registry. This allows one to get information about this specific object, modify it and register event listeners.
Event listeners are therefore callbacks that clients can register on proxy objects using pw_*_add_listener, which takes a struct pw_*_events defining a list of function pointers; the star should be replaced by the object type. The libpipewire library will tell the remote object about this new listener, so that it notifies the client when a new event occurs.
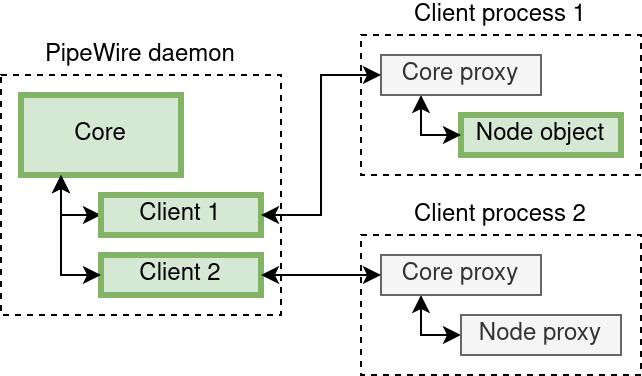
We’ll take an example to describe the concept of proxies:
Schema of a daemon and two clients, with one client having a proxy pointing to the remote node
In this schema, green blocks are objects (the core, clients and a node) and grey ones are proxies. Dotted blocks represent processes. Here is what would happen, in order, assuming client process 2 wants to get the the state of a node that lives in client process 1:
Client process 2 creates a connection with the core, that means:
On the daemon side, a client object is created and exported to the registry;
On the client side, a proxy to the core object is acquired, which represents the connection with the core.
It then uses the proxy to core and the pw_core_get_registry function to get a handle on the registry.
It registers an event listener on the registry’s global event, by passing a struct pw_registry_events to pw_registry_add_listener. That event listener will get called once for each object exported to the registry.
The global event handler will therefore get called once with the node as argument. When this happens, a proxy to the node can be obtained using pw_registry_bind and the info event can be listened upon using pw_node_add_listener on the node proxy with a struct pw_client_events containing the list of function pointers used as event handlers.
The info event handler will therefore be called once with a struct pw_node_info argument, that contains the node’s state. It will then be called each time the state changes.
The same thing is done in tutorial6.c to print every clients’ information.
Context configuration
When a PipeWire context is created using pw_context_new, we mentioned that it finds and parses a configuration file from the filesystem. To find a configuration file, PipeWire requires its name. It then searches for this file in following locations, $sysconfdir and $datadir being PipeWire build variables:
Firstly, it checks in $XDG_CONFIG_HOME/pipewire/ (most probably ~/.config/pipewire/);
Then, it looks in $sysconfdir/pipewire/ (most probably /etc/pipewire/);
As a last resort, it tries $datadir/pipewire/ (most probably /usr/share/pipewire/).
PipeWire ships with default configuration files, which are often put in the $datadir/pipewire/ path by distributions, meaning those get used as long as they have not been overriden by custom global configuration files (in $sysconfdir/pipewire/) or personal configuration files (in $XDG_CONFIG_HOME/pipewire/). Those are namely:
pipewire-pulse.conf, for the daemon process that implements the PulseAudio API;
client.conf, for processes that want to communicate using the PipeWire API;
client-rt.conf, for processes that want to implement node processing, RT meaning realtime;
jack.conf, used by the PipeWire implementation of the JACK shared object library;
minimal.conf, meant as an example for those that want to run PipeWire without a session manager (static configuration of an ALSA device, nodes and links).
The default configuration name used by a context is client.conf. This can be overriden either through the PIPEWIRE_CONFIG_NAME environment variable or through the PW_KEY_CONFIG_NAME property, given as an argument to pw_context_new. The search path can also be modified using the PIPEWIRE_CONFIG_PREFIX environment variable.
Make sure to go through one of them to get familiar with them! The format is described as a “relaxed JSON variant”, where strings do not need to be quoted, the key-value separator is an equal symbol, commas are unnecessary and comments are allowed starting with an hash mark. Here are the sections that can be found in a configuration file:
context.properties, that configures the context (log level, memory locking, D-Bus support, etc.). It is also used extensively by pipewire.conf (the daemon’s configuration) to configure the graph default and allowed settings.
context.spa-libs defines the shared object library that should be used when a SPA factory is asked for. The default values are best to be kept alone.
context.modules lists the PipeWire modules that should be loaded. Each entry has an associated comment that explains clearly what each modules does. As an example, the difference between client.conf and client-rt.conf is the loading of libpipewire-module-rt that turns on real-time priorities for the process and its threads.
context.objects allows one to statically create objects by providing a factory name associated with arguments. This is what is used by the daemon’s pipewire.conf to create the dummy node, or by minimal.conf to statically create an ALSA device and node as well as a static node.
context.exec lists programs that will be executed as childs of the process (using fork(2) followed by execvp(3)). This was primarily used to start the session manager; it is however recommended to handle its boot separately, using your init system of choice.
filter.properties and stream.properties are used in client.conf and client-rt.conf to configure node implementations. Filters and streams are the two abstractions that can be used to implement custom nodes, which we will talk in detail in a later article.
Inter-Process Communication (IPC)
Being a project that handles multimedia data, transfers it in-between processes and aims for low-latency, the inter-process communication it uses is at the heart of its implementation.
Event loop
The event-loop described previously is the scheduling mechanism for every PipeWire process (the daemon and every PipeWire client process, including WirePlumber, pipewire-pulse and others). This loop is an abstraction layer over the epoll(7) facility. The concept is rather simple: it allows one to monitor multiple file descriptors with a single blocking call, that will return once one file descriptor is available for an operation.
The main entry point to this event loop is pw_loop_add_source or its wrapper pw_loop_add_io, which adds a new file descriptor to be listened for and a callback to take action once an operation is possible. In addition to the loop instance, the file descriptor and the callback, it takes the following arguments:
A mask describing the operations for which we should be waken up: read(2) is possible (SPA_IO_IN), write(2) is possible (SPA_IO_OUT), an error occured (SPA_IO_ERR) and a hang-up occured (SPA_IO_HUP);
A boolean describing whether the file descriptor should be closed automatically at the end of not;
A void pointer given to the callback; this is often called user data which means we can avoid static global variables.
Note: this event loop implementation is not reserved to PipeWire-related processing; it can be used as a main event loop in your processes.
That leads us to the other synchronisation and communication primitives used, which are all file-descriptor-based for integration with the event loop.
File-descriptor-based IPC
eventfd(2) is used as the main wake-up method when that is required, such as with node objects that must run their process method. signalfd(2) is used to register signal callbacks in the event-loop.
epoll(7), eventfd(2) and signalfd(2) being Linux-specific, it should be noted that there is an abstraction layer that allows one to use other primitives for implementations. Currently, Xenomai primitives are supported through this layer.
The main communication protocol is based upon a local streaming socket(2): socket(PF_LOCAL, SOCK_STREAM | SOCK_CLOEXEC | SOCK_NONBLOCK, 0). The encoding scheme used is called Plain Object Data (POD) and is a rather simple format; a POD has a 32-bits size, a 32-bits type followed by the content. There are basic types (none, bool, int, string, bytes, etc.) and container types (array, struct, object and sequence). In top of this encoding scheme is provided the Simple Plugin API (SPA) which implements a sort of Remote Procedure Call (RPC). See this PipeWire under the hood blog article that has a detailed section on POD, SPA and example usage of the provided APIs.
D-Bus
PipeWire and WirePlumber also optionally depend on the higher-level D-Bus communication protocol for specific features:
Flatpaks are desktop sandboxed applications, that rely on portal (a process that exposes D-Bus interfaces) to access system-wide features such as printing and audio. In our case, libpipewire-module-portal allows the portal process to handle permission management relative to audio for Flatpak applications. See module-portal.c and xdg-desktop-portal for more information.
WirePlumber, through its module-reserve-device, supports the org.freedesktop.ReserveDevice1 D-Bus interface. It allows one to reserve an audio device for exclusive use. See the quick and to-the-point specification about the interface for more information.
D-Bus support is required if Bluetooth is wanted, to allow communication with the BlueZ process. See the SPA bluez5 plugin.
Conclusion
Now that the overall concepts as well as design and implementation choices have been covered, it is time for some hands-on! We will carry on with a bare install based upon a Linux kernel and a Buildroot-built root filesystem image. Our goal will be to output sound to an USB ALSA PCM sink, from an audio file.
Do not hesitate to come back to this article later on, that might help you clear-up some blurry concepts if needed!