Thomas Petazzoni is Bootlin's co-owner and CEO. Thomas joined Bootlin in 2008 as a kernel and embedded Linux engineer, became CTO in 2013, and co-owner/CEO in 2021. More details...
The Embedded Linux Conference Europe edition 2018 took place last week in Edinburgh, Scotland, and no less than 9 engineers from Bootlin attended the conference. In this blog post, we would like to share the slides, materials and videos of the talks, tutorials and demos we gave during this conference.
Talk: Supporting Hardware Codecs in a Linux system – Maxime Ripard
This talk was given by Bootlin engineer Maxime Ripard, who has worked since spring 2018 with Paul Kocialkowski on adding support in the upstream Linux kernel for hardware-accelerated video decoding on Allwinner platforms. This project was the topic of the successful crowd-funding campaign we launched in February 2018, and for which we regularly posted updates on our blog.
Talk: Networking: From the Ethernet MAC to the Link Partner – Maxime Chevallier & Antoine Ténart
This talk was given by Bootlin engineers Maxime Chevallier and Antoine Ténart, who shared their knowledge and experience working on enabling network hardware in Linux, trying to clarify how Ethernet MAC and PHYs interact, how PHYs communicate with their link partner, what are the protocols involved, etc.
Talk: SPI Memory support in Linux and U-Boot – Miquèl Raynal
This talk was given by Miquèl Raynal, who has worked with Bootlin engineer Boris Brezillon on adding support for SPI NAND in U-Boot and Linux, as well as improving in general the support for SPI flash memory, see our previous blog post.
The video will be published later, as it was not recorded by the Linux Foundation, but by the E-ALE track organizers.
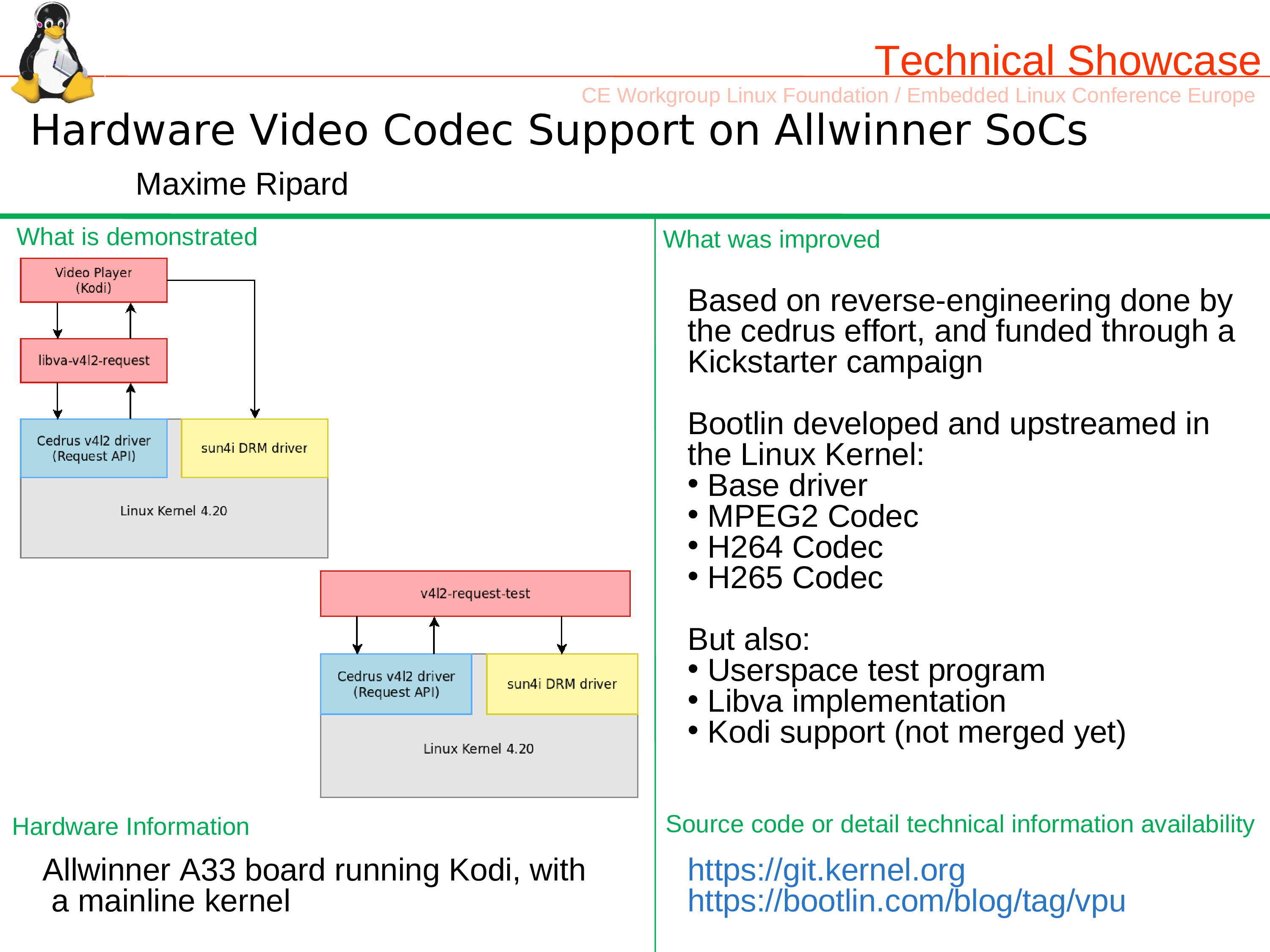
Demo: Hardware Video Codec Support on Allwinner SoCs – Maxime Ripard
In this demonstration, Maxime Ripard was showing the upstream Linux kernel support for the Allwinner VPU, which provides hardware-accelerated video decoding for MPEG2, H264 and H265 within the Kodi media player on Allwinner platforms.
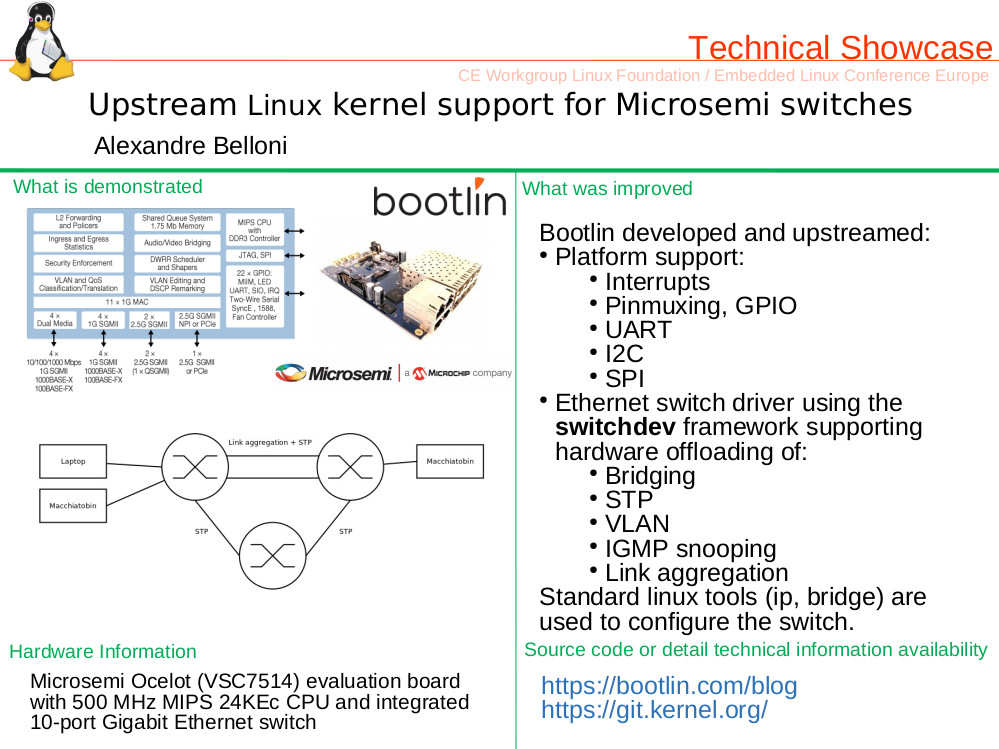
Demo: Upstream Linux kernel support for Microsemi switches – Alexandre Belloni
Alexandre Belloni showing upstream Linux kernel support for Microsemi Ethernet switches at the Embedded Linux Conference Europe 2018
In this demonstration, Bootlin engineer Alexandre Belloni was showing the upstream Linux kernel support for the VSC5713 and VSC7514 Microsemi Ethernet switches, which we presented in a previous blog post. Thanks to this support in upstream Linux, the different ports of the switch are seen as regular Linux network interfaces, and standard Linux user-space tools can be used to bridge the ports, set up VLAN filtering, and more. This makes such switches a lot easier to use than vendor-specific SDKs.
Even though the bulk of the development on the Allwinner VPU support is done, we are still working on completing the upstreaming of the kernel driver, and some progress has been made recently on this topic:
On September 10, core Video4Linux developer Hans Verkuil sent a pull request to Video4Linux maintainer Mauro Carvalho Chehab to get the Cedrus driver merged. This means we’re getting closer and closer to have the driver merged. Unfortunately, some last minute issues were found in the patch series, so this pull request wasn’t merged.
On September 13, Bootlin engineer Maxime Ripard sent a new iteration of the Cedrus driver, version 10, which addresses those issues.
In addition, as the Allwinner platform maintainer, Maxime Ripard has merged the patches adding the Device Tree description of the Allwinner VPU, which reduces the Cedrus patch series to just 5 patches. They are now in the branch sunxi/dt-for-4.20, which should be part of the upcoming 4.20 Linux release.
T-Shirt for Allwinner VPU campaign supporters
In addition to this progress on the Linux kernel driver upstreaming process, we also moved forward with delivering the perks to the companies and individuals who supported our campaign:
A CREDITS file has been added to the libva-v4l2-request base, thanking all our backers who pleged more than 16 EUR.
The T-Shirts for the backers who pledged more than 128 EUR have been sent to those in the EU. We are also working on sending the t-shirts to those outside the EU, but it takes a bit more time due to the need for customs declarations. Don’t hesitate to take a picture of you with the T-Shirt, and post it on Twitter with the hashtag #VPULinuxDriverSupporter.
Last year, a number of Bootlin engineers attended the Linux Plumbers conference. This year again, Bootlin will participate to the event, with engineer Antoine Ténart traveling to Vancouver, Canada on November 13-15 for this conference.
The Kernel Recipes conference, to be held in Paris on September 26-28, has become over the years a very popular conference on kernel topics, with its atypical single-track format and limitation to 100 attendees. With this conference taking place in Paris, France, Bootlin engineers obviously never missed the chance to attend, and this year again, several of us will participate to the event.
The Embedded Linux Conference is one of the most important events in the embedded Linux industry, and Bootlin has been participating to this event non-stop since its creation in 2007. So it should be no surprise that we will once again be participating to the 2018 edition of this conference, which will take place on October 22-24 in Edinburgh, Scotland.
Of course, we are not only attending, but also giving a number of talks and tutorials:
Monday 22 October at 11:15, Maxime Ripard is giving a talk Supporting Hardware Codecs in a Linux system, in which he will explain how HW video decoders/encoders are supported in the Video4Linux kernel subsystem, and share his experience working on the Allwinner VPU support in Linux.
Monday 22 October at 12:05, Antoine Ténart and Maxime Chevallier are giving a common talk Networking: From the Ethernet MAC to the Link Partner, in which they will demystify a number of acronyms and technologies used in networking hardware, and detail how Ethernet MAC and PHY are represented and managed in Linux.
Tuesday 23 October at 12:20, Miquèl Raynal is giving a talk SPI Memory support in Linux and U-Boot, in which he will explain how SPI NAND and SPI NOR memories are supported.
Thomas Petazzoni will be giving a tutorial as part of the Embedded Apprentice Linux Engineer track, titled Getting started with Buildroot. This tutorial has not been scheduled yet.
Michael Opdenacker will also be giving a tutorial as part of the Embedded Apprentice Linux Engineer track, titled Introduction to Linux kernel driver programming. This tutorial has not been scheduled yet.
Maxime Chevallier will participate to the Real Time Summit, also on October 25
While Bootlin CEO Michael Opdenacker was in the Embedded Linux Conference Europe Program Commitee for a number of years, he’s been replaced this year by Bootlin CTO Thomas Petazzoni. Bootlin was thus involved in the daunting but very interesting task of reviewing and selecting the talks to compose the program of this year’s event.
This is going to be a very busy week for us, and we are looking forward to attending the great talks proposed by all other speakers, and meeting the embedded Linux community once again!
Bootlin engineer Maxime Ripard will be attending the X.org Developer Conference 2018, from September 26 to September 28 in A Coruña, Spain. This conference is the main event to discuss Linux graphics and display related topics and meet the Linux kernel and userspace developers working in this field.
At Bootlin, Maxime has been involved over the last few years in a number of display related developments:
He is the initial author and the maintainer of the DRM display controller driver for the Allwinner processors, to which he has progressively added numerous features over the years, including parallel RGB support, HDMI support, DSI support and TV-out support, for many different Allwinner platforms.
He has worked on enabling OpenGL support on Allwinner platforms using the open-source kernel driver and the closed-source binary blob provided by ARM, making OpenGL work using a mainline and upstream Linux kernel on Allwinner hardware. As part of this, Maxime designed and upstreamed a Device Tree binding to describe the Mali GPU and maintains sunxi-mali, a fork of the ARM-provided kernel driver for Mali, modified to work with the upstream Linux kernel.
Maxime has been involved in setting up automated testing of the RaspberryPi display subsystem, using the Chamelium platform and the intel-gpu-tools test suite. See our blog post on this topic.
As part of Bootlin’s work on the Linux support for the Allwinner VPU (funded by our crowdfunding campaign earlier this year), Maxime got involved into issues related to feeding the output of the VPU into the display pipeline found on Allwinner platforms.
A group of Linux kernel developers is organizing on September 11-14 the Alpine Linux Persistence and Storage Summit, a meeting of kernel developers to discuss the hot topics in Linux storage and file systems, such as persistent memory, NVMe, multi-pathing, raw or open channel flash and I/O scheduling.
Bootlin engineers Boris Brezillon, who is the co-maintainer of the MTD subsystem in the Linux kernel, and Miquèl Raynal, who is the co-maintainer of the NAND subsystem in the Linux kernel, will be attending this event. Through this participation, Bootlin is supporting the work done by its engineers acting as Linux kernel maintainers: they will have the chance to meet other kernel developers and discuss the current issues and future of storage-related subsystems. After the event, we will be reporting on our blog about the discussions that took place.
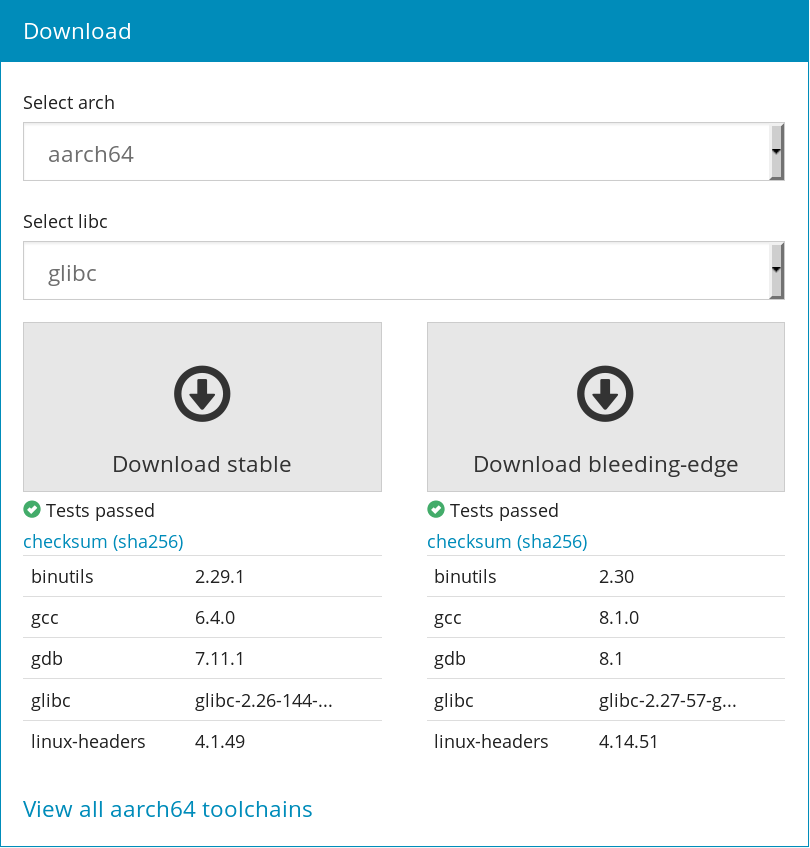
Since last year, our site toolchains.bootlin.com provides a large selection of ready-to-use cross-compilation toolchains, covering a wide range of CPU architectures and C libraries. We have just deployed today a new update to all our bleeding-edge toolchains. Those toolchains are now based on:
GCC 8.1.0
Binutils 2.30
glibc 2.27 (plus fixes) or uClibc-ng 1.0.30 or musl 1.1.19
Linux headers 4.14
GDB 8.1
All our 77 bleeding-edge toolchains built successfully with those component versions, and many of them received runtime testing under Qemu. We would like to do a special thanks to Romain Naour from Smile, who contributed a lot to this update by adding GCC 8.1 and GDB 8.1 support in Buildroot, and fixing a number of issues discovered when building those toolchains.
We will continue to regularly update our toolchains, and we are very interested in receiving feedback about those toolchains, to fix any issue or extend the range of configurations that are covered. Do not hesitate to get in touch!
During a 3-day week-end, between March 31 and April 2, the Buildroot project organized a hackathon in Paris with six core/active developers of the project. The goal of this meeting was to make progress on outstanding patch series and reduce the backlog of contributions waiting in the project patchwork. Thomas Petazzoni, CTO and embedded Linux engineer at Bootlin participated to the event, joining Arnout Vandecappelle, Peter Korsgaard, Yann E. Morin, Romain Naour and Maxime Hadjinlian in the fantastic location provided by Scaleway.
Buildroot developers in the Jungle Room
Thomas summarized the progress day by day in three separate e-mails sent on the mailing list:
Merge of a patch series from Yann E. Morin that reworks how filesystem images are generated, to make this process compatible with top-level parallel build.
Merge of a patch series from Maxime Hadjinlian (with significant contributions from Yann E. Morin) that implements caching of Git downloads, significantly reducing the time needed to clone different versions of the same project through Git, especially big projects like the Linux kernel. An extensive summary of the changes was posted by Thomas on the mailing list.
Merge of a golang-package infrastructure, contributed by Angelo Compagnucci, to help building packages written in Go, and using the standardized Go build system.
The check-package tool was extended to validate the coding style of files outside the package/ folder, thanks to a contribution from Ricardo Martincoski.
Arnout worked on a significant number of pending Qt5 patches, and specifically merged the bump to Qt 5.10.
The LLVM patch series from Valentin Korenblit was reviewed, and thanks to this work, the initial LLVM package was merged a few days after the hackathon.
Last but not least, a large number of patches sitting in patchwork have been discussed, and either applied (after some rework) or reviewed (with comments made on the mailing list).
Working at Scaleway
In total, 222 commits have been pushed to the master branch during this meeting, and the backlog of patches has reduced from ~350 patches to ~175 patches.
Once again, the Buildroot community would like to thank Scaleway for hosting this event! The next Buildroot meeting will most likely take place right before the Embedded Linux Conference in Edinburgh, on October 20-21.
Early February, we announced the launch of our first Kickstarter campaign, whose goal was to add support for the video decoding unit found in most Allwinner processors to the official Linux kernel.
We were very pleased to see that in just one day, enough companies and individuals participated to fund the main goal of the campaign, collecting more than 17,600 EUR. And now that the campaign is over since March 18, we are even more pleased, as we have reached a funding level sufficient to cover not only our main goal, but also our two first stretch goals.
Thanks to the participation of all those companies and individuals, we will be able to:
Deliver our main goal, which we expect to deliver by the end of June 2018, which includes:
Making sure that the codec works on the older Allwinner SoCs that are still widely used: A10 (Cubieboard), A13 (A13-Olinuxino), A20 (Cubieboard 2, A20-Olinuxino), A33 (A33-Olinuxino, BananaPi M2-Magic), R8 (CHIP) and R16 (NES and Super NES classic). Support for the newer SoCs (H3, H5 and A64) requires more work, and is part of our first stretch goal below.
Polishing the existing MPEG2 decoding support to make it fully production ready.
Implementing H264 video decoding, since H264 is by far one of the most popular video codec.
Modifying the Allwinner display driver in order to be able to directly display the decoded frames instead of converting and copying those frames, which is very inefficient from a CPU consumption point of view
Providing a user-space library easy to integrate in the popular open-source video players
Upstreaming those changes to the official Linux kernel
Deliver our two first stretch goals, which we expect to deliver by the end of 2018, which includes:
Supporting the newer Allwinner SoCs, such as the H3 (Most of the Orange Pis, Nano Pi M1, ..), H5 (Orange Pi PC2, NanoPi NEO2, …) and A64 (Pine64, BananaPi M64, …).
H265 video decoding support
Unfortunately, our third stretch goal, which consisted in adding support for H264 encoding was not reached, so we don’t know yet if we will have enough time to look into this topic.
Maxime Ripard and Paul Kocialkowski working on Allwinner VPU support
However, the work on the other topics has already started, with our intern Paul Kocialkowski has started to work since March 1st on this Allwinner VPU effort, and Maxime Ripard has started this week. We have already published, will continue to publish a report every week: week 10, week 11 and week 12. You can follow the progress of this project by reading our blog, our Twitter feed or the Kickstarter updates. You can also read the Sunxi-cedrus Wiki page to get all the details about this project and its progress.
Beyond the specific topic of the Allwinner VPU support, we are very happy to see that the model of funding upstream Linux kernel work through crowd-funding has worked. Most Kickstarter projects, in exchange for the participants contribution, provide to the participant a specific product (a book, a device) that only benefits to the contributor. Here, the result of this campaign will be shared freely with everybody, both Kickstarter contributors and non-contributors, and we’re proud to see that our experience has convinced numerous companies and individuals to support our project. Of course, we will be organizing in the near future the shipment of the t-shirts as well as the beer drinking sessions with Bootlin engineer Maxime Ripard.
To conclude, we would like to thank all our participants (we’re naming only the ones who baked at a level above 16 EUR, as above this level contributors are going to be mentioned in the CREDITS file, which clarifies their intent to be publicly named). First a number of companies supported our work: OrangePi, Libre Computer, neutis.io, FriendlyArm, Pine64, Olimex and of course a huge number of individuals: Abe Lacker, Adam Morris, Adam Oberbeck, Alerino Reis, Alex, Alexander A. Istomin, Alexander Kamm, Alexandru Nedel, Alex Kaplan, Amarpreet Minhas, André, Andreas, Andreas Färber, Andreas Rozek, Andre Przywara, Andrew Langley, Angel Rua Amo, Anssi Kolehmainen, Antony, Appreciation of Efforts, Aron Somodi, Artur Huhtaniemi, Atsushi Sasaki, Bastien Nocera, Bavay, Benjamin Glass, Benjamin Larsson, Ben Young, Bernard D’Havé, Bert Lindner, Bert Vermeulen, BESSIERES MARC, Biji-san, Bob Black, brot, Bruce Shipman, Butterkeks, Carla Sella, Carl Wall, Carsten Tolkmit, cbrocas, chae, Charlie Bruce, Christian Gnägi, Christian Pellegrin, Christian Stalp, Christophe Vaillot, Christoph Kröppl, Conan Kudo (ニール・ゴンパ), D1don, Dale Cousins, Daniel, Daniel Hrynczenko, Daniel Kulesz, Daniel Mühlbachler, David Pottage, David Willmore, defsy, Denis Bodor, DESSARD Guy, Dimitrios Bogiatzoules, Dominique Dumont, Doyle Young, Dubouil, Eelco Wesemann, eineki, Emil Karlson, Emmanuel Fusté, Erdem MEYDANLI, Eric des Courtis, Eric Jensen, Eric Koorn, Éric Périé, Erik, erikf, Evaryont, Fabian Korak, Felix Eickeler, Flo, Florian Beier, Florian Kempf, Frank, Frank van Kesteren, Frederir, G40, Gabor, Gabriel Ortiz, Garrett Gee, Georg Ottinger, Gerald Hochegger, Geralt, ghostpatch, Gianpaolo Macario, Giulio Benetti, Guenther Gassner, Guilhem, Guilhem Saurel, hackman, Hamish, Hanno Helge, Hans-Frieder Vogt, Heinz Thölecke, Henrik Kuhn, hook, Hugh Reynolds, Ian Daniher, iav, Inapplicable, Ingo Strauch, Ioan Rogers, Irvel Nduva, James, James Cloos, James Valleroy, jan koopmanschap, Jared Smith, Jari-Matti, Jarkko Pöyry, Jasper Horn, jean, Jean-Pierre Rivière, Jeffrey Sites, Jernej, Jerome Hanoteau, JK, John Kelley, Johnny Sorocil, Juanjo Marin, Jussi Pakkanen, Justin Ross, Karl Palsson, Kazım Rıfat Özyılmaz, Kean, Kevin Fowlks, Kevin Read, kicklix, Kiesel, Koen Kooi, Korbinian Probst, kratz00, Laurent GUERBY, Lee Donaghy, liushuyu, Logicite, luigi, Lukas Schauer, lzrmzz, Maksims Matjakubovs, Manuel, Marcel Sarge, Marcus Cooper, Mario Villarreal, Mark Dietzer, Markus Härer, Martijn Bosgraaf, mateuszkj, Mathias Brossard, mathieu, Matsumoto Kenichi, Matthew Zhang, Matthias, Matthias Lamm, Matt Mets, Maxime Brousse, Me, MESNIL Mikaël, Michael Gregorowicz, Michael Thalmeier, Michal Zatloukal, Mirko Vogt, mouren, N/A, naguirre, Neil Davenport, Nick Crasci, Nick Richards, Oleksij Rempel, oliver, Oliver Heyme, OSAKANA TARO, othiman, ozcoder, Pablo, Patrick, Paul Philippov, Paul Sykes, Per Larsson, Peter Gnodde, Peter Robinson, Philip-Dylan Gleonec, Phipli, Phoenix Chen, Pierce Lopez, Priit Laes, Prisma, Rainer Stober, Reignier, René Kliment, Reto Haeberli, Ricardo Salveti de Araujo, Richard Cote, Richard Ferlazzo, Riku Voipio, Robert Lukierski, Robert McQueen, roens, Rui Gu, Ryan Casey, Salvatore Bognanni, Samuel Frederick, Scott Devaney, Sebastian Krzyszkowiak, Sébastien DA ROCHA, Sergey Kopalkin, Sertac Tulluk, Shelby Cruver, Shervin Emami, SIMANCAS, Simon Josefsson, Spas Kyuchukov, ssam, Stan, Stanislav Bogatyrev, Stas, Stefan Bethke, Stefan Monnier, Steffen Elste, Stephan, Stephan Bärwolf, Stephen Kelly, Steven Seifried, Stokes Gresh, Sven Kasemann, SvOlli, Tarjei Solvang Tjønn, Tetsuyuki Kobayashi, Texier Pierre-jean, Thomas Monjalon, Thomas Samson, Tim Symossek, Todd Zebert, Tomas Virgl, tpc010, Tyler Style, Valentin Hăloiu, valhalla, Vasily Evseenko, Vitaly Shukela, Xavier Duret, Yannick Allard, Yves Serrano, Zoltan Herpai, ZotoPatate, zym060050.
 This talk was given by Bootlin engineer Maxime Ripard, who has worked since spring 2018 with Paul Kocialkowski on adding support in the upstream Linux kernel for hardware-accelerated video decoding on Allwinner platforms. This project was the topic of the successful crowd-funding campaign we launched in February 2018, and for which we regularly posted updates on our blog.
This talk was given by Bootlin engineer Maxime Ripard, who has worked since spring 2018 with Paul Kocialkowski on adding support in the upstream Linux kernel for hardware-accelerated video decoding on Allwinner platforms. This project was the topic of the successful crowd-funding campaign we launched in February 2018, and for which we regularly posted updates on our blog.
 This talk was given by Bootlin engineers Maxime Chevallier and Antoine Ténart, who shared their knowledge and experience working on enabling network hardware in Linux, trying to clarify how Ethernet MAC and PHYs interact, how PHYs communicate with their link partner, what are the protocols involved, etc.
This talk was given by Bootlin engineers Maxime Chevallier and Antoine Ténart, who shared their knowledge and experience working on enabling network hardware in Linux, trying to clarify how Ethernet MAC and PHYs interact, how PHYs communicate with their link partner, what are the protocols involved, etc. This talk was given by Miquèl Raynal, who has worked with Bootlin engineer Boris Brezillon on adding support for SPI NAND in U-Boot and Linux, as well as improving in general the support for SPI flash memory, see our previous blog post.
This talk was given by Miquèl Raynal, who has worked with Bootlin engineer Boris Brezillon on adding support for SPI NAND in U-Boot and Linux, as well as improving in general the support for SPI flash memory, see our previous blog post.