Thomas Petazzoni is Bootlin's co-owner and CEO. Thomas joined Bootlin in 2008 as a kernel and embedded Linux engineer, became CTO in 2013, and co-owner/CEO in 2021. More details...
Every year, the X.Org community organizes the X.Org Developers Conference, the main conference to discuss graphics support in Linux. Despite the name, the conference is no longer restricted to X.Org topics, but also covers Wayland, Mesa3D and many other topics.
The 2019 edition will take place on October 2-4 in Montréal, Canada, and the schedule of this event is already available.
Bootlin engineer Paul Kocialkowski will participate to this conference. Paul is Bootlin’s display and graphics expert, he is one of the developer of the Allwinner VPU support in Linux and has made several contributions to the Allwinner DRM driver, as well as worked on the RaspberryPi graphics controller automated testing. Participating to this conference allows us to stay up-to-date with the latest developments in the Linux graphics community.
If you’re attending the conference, do not hesitate to get in touch with Paul!
We’ll call our application qt-sensor-demo, so create a directory with this name, outside of Buildroot. It’s important to not mix up your application code with your build system: you could very well decide to use another build system one day, while keeping your application code. To keep things simple, create this qt-sensor-demo side-by-side with Buildroot, as this will be important for a future step in this blog post.
In this directory, create a main.cpp file with the following code:
It should be fairly straight-forward to understand that this program creates a QApplication object, a push button with the Hello world! label, sets the button size to 100 by 30 pixels, shows the button, and enters the application event loop. It is obviously a very basic application, because it doesn’t do anything useful, but that’s good enough as a starting point.
Now, we need to build this application. Building Qt applications by hand is definitely not reasonable, as Qt may need to run several tools on the source code before it gets built, and requires a number of compiler and linker flags. So, we won’t write a Makefile by hand, but instead use a build tool that generates the Makefile for us. We have a number of options here:
In this blog post, we’ll simply stick to qmake, which is good enough for a number of Qt-based applications. qmake takes as input one or several .pro files describing the project, and uses that to generate Makefiles (on Linux systems).
In our case, the qt-sensor-demo.pro file will be as simple as:
QT += widgets
SOURCES = main.cpp
Building our application
We have two ways to build our application:
Manually outside of Buildroot. In this case, we’ll use the Buildroot-provided compiler and tools, but we will trigger the build of our application separately from the Buildroot build.
Using Buildroot. In this case, our application would have a corresponding Buildroot package, that would automate building the application as part of the complete system build process.
Ultimately, we definitely want to have a Buildroot package for our application, to make sure the entire build is fully automated. However, during the active development of the application, it may be useful to build it manually outside of Buildroot, so we are going to see both solutions, which are not mutually exclusive: you can have a Buildroot package for your application, and still build it manually when you’re doing active development/debugging.
Building manually outside of Buildroot
To build manually, we simply need to first invoke Buildroot’s provided qmake:
/path/to/buildroot/output/host/bin/qmake
This will generate a Makefile, that we can use to build our application:
make
At this point, you should have:
$ ls
main.cpp main.o Makefile qt-sensor-demo qt-sensor-demo.pro
The qt-sensor-demo executable is compiled for ARM, and linked against the various libraries built by Buildroot.
Now, we need this executable on our STM32MP15 target. For now, we’ll simply add it to the SD card image:
cp qt-sensor-demo /path/to/buildroot/output/target/usr/bin/
cd /path/to/buildroot/
make
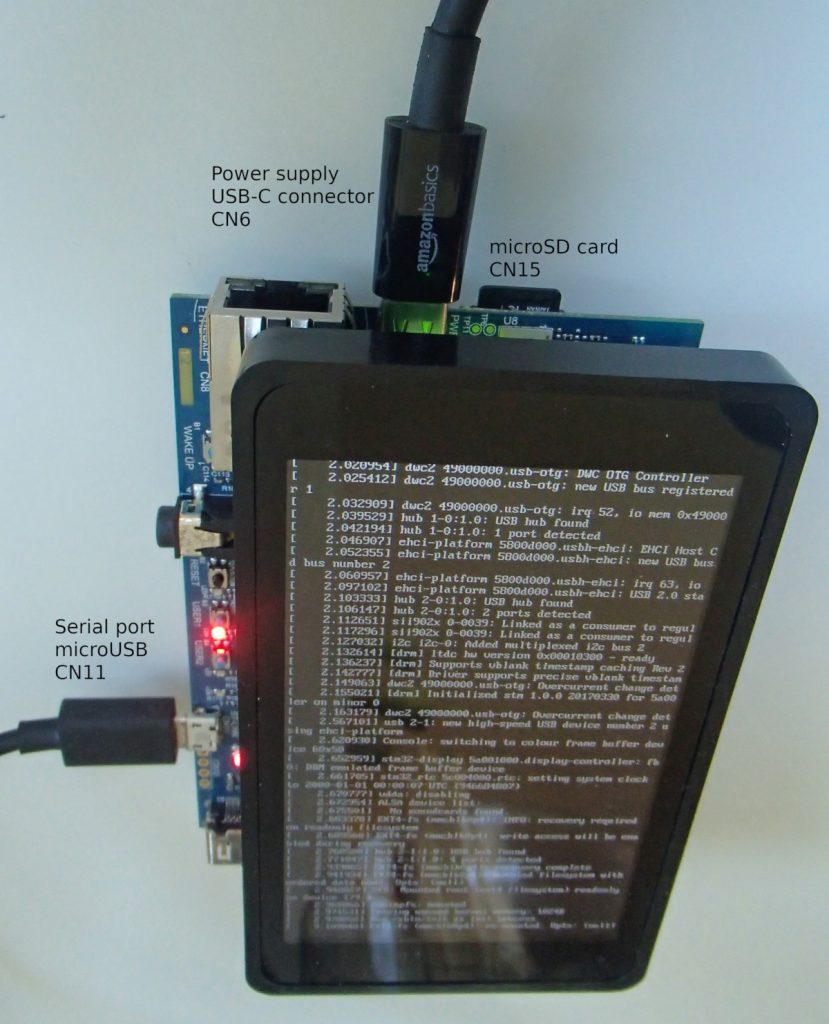
Hello World Qt application running on the STM32MP15 Discovery platformThis will copy the executable to the output/target folder, which contains the root filesystem produced by Buildroot. Then invoking Buildroot’s make will ensure that the root filesystem and SD card images get re-generated. Of course, beware that if you run a Buildroot make clean, all the contents of output/, including output/target/ get removed. So this technique is only suitable for temporary changes. This is fine since anyway as discussed above, ultimately we’ll have a proper Buildroot package to build our qt-sensor-demo application.
Reflash your SD card with the new image, and on the target, run the demo:
# qt-sensor-demo -platform linuxfb
Setting SSH for communication with the board
Regenerating the SD card image and reflashing the entire SD card every time we want to change our application is not going to be very efficient during the application development/debugging. So instead, we’ll set up networking communication with the board, and use SSH to transfer files. This will also be useful for Qt Creator, as it uses SFTP to deploy files to the target.
Let’s start by enabling a small SSH client/server, called Dropbear. Go in Buildroot menuconfig, and enable the BR2_PACKAGE_DROPBEAR option (in Target packages, Networking applications, dropbear). While Dropbear provides SSH access, it does not support SFTP which will be needed by Qt Creator, so we’ll also enable an SFTP server, gesftpserver. So, we’ll enable BR2_PACKAGE_GESFTPSERVER as well (in Target packages, Networking applications, gesftpserver).
Then, in order to log in through SSH as root, we must have a non-empty root password, so set BR2_TARGET_GENERIC_ROOT_PASSWD (in System configuration, Root password) to a value you like.
You can now exit menuconfig, as we have enabled all features we needed. Before restarting the build, we need to do one last thing: set up a network configuration file so that our STM32MP15 system configures an IP address. To do this, we’ll create a /etc/network/interfaces file, and add it to the root filesystem using the root filesystem overlay mechanism, which was presented in the first post of this series. So, in your Buildroot sources, just create a file board/stmicroelectronics/stm32mp157-dk/overlay/etc/network/interfaces, with the following contents:
auto lo
iface lo inet loopback
auto eth0
iface eth0 inet static
address 192.168.42.2
netmask 255.255.255.0
This will ensure the eth0 interface of our target gets configured with the 192.168.42.2 IP address. Of course, feel free to use a different IP address.
Then, run make in Buildroot, reflash your SD card, and boot your system. At boot time, you should see:
Starting dropbear sshd: OK
You can also run ip addr show dev eth0 to check the IP address of the eth0 interface:
2: eth0: mtu 1500 qdisc mq qlen 1000
link/ether 00:80:e1:42:4d:e3 brd ff:ff:ff:ff:ff:ff
inet 192.168.42.2/24 scope global eth0
valid_lft forever preferred_lft forever
inet6 fe80::280:e1ff:fe42:4de3/64 scope link
valid_lft forever preferred_lft forever
So the IPv4 address is properly set to 192.168.42.2, as expected.
Now, on your workstation, we need to configure the 192.168.42.1 static IP address so that you can connect to your board. It is very likely that the Linux system on your workstation is using NetworkManager. Let’s add a connection:
$ nmcli con add con-name buildroot-target type ethernet ifname enp57s0u1u3 ip4 192.168.42.1/24
Connection 'buildroot-target' (234e0d9a-5c4f-4eac-9277-c3587bbd370d) successfully added.
Make sure to replace enp57s0u1u by the name of your PC wired interface, to which the board is connected. We of course assume you have an Ethernet cable directly connecting your PC to the board.
Finally, enable the connection:
$ nmcli con up id buildroot-target
Connection successfully activated (D-Bus active path: /org/freedesktop/NetworkManager/ActiveConnection/10)
We can now ping our target:
$ ping 192.168.42.2
PING 192.168.42.2 (192.168.42.2) 56(84) bytes of data.
64 bytes from 192.168.42.2: icmp_seq=1 ttl=64 time=1.33 ms
Log-in over SSH:
$ ssh root@192.168.42.2
root@192.168.42.2's password:
# uname -a
Linux buildroot 4.19.26 #1 SMP PREEMPT Wed Aug 28 15:54:58 CEST 2019 armv7l GNU/Linux
# cat /etc/issue
Welcome to Buildroot
#
So, now we can make a change to our Qt5 application, for example changing the label of the button, recompile by running make in the application directory, and directly copy the application using scp, and run it over ssh:
Much nicer, we don’t have to reflash our SD card every time we want to test a change in our application!
Note that we could create a public/private key pair, with the public key on our target, and this way not have to enter our password every time we want to transfer a file or log-in to the target. Since this blog post is already very long, we’ll live that as an exercise for the reader, there are plenty of resources on the Web about this topic.
Setting up Qt Creator
Some people (such as your author) are happy with using a powerful text editor (such as Vim or Emacs) and a terminal to do their application development. But others are sometimes more comfortable with an integrated development environment (IDE). So in this section, we’ll see how to set up Qt Creator to write, build, deploy and debug a Qt5 application.
Installing Qt Creator
First of all, you’ll have to install Qt Creator, which you can do using the package management system of your distribution. On Fedora systems, this would be:
$ sudo dnf install qt-creator
On Debian/Ubuntu systems:
$ sudo apt install qtcreator
The following instructions have been written and tested against Qt Creator version 4.9.2.
Creating a kit
After starting Qt Creator, the first thing to do is to create a kit, which describes the cross-compiler and Qt installation provided by Buildroot. Go to Tools -> Options, and the first item should be Kits:
Click on Add, and fill in the different fields as follows:
Name: Buildroot ARM
Device type: Generic Linux Device
Sysroot: /path/to/buildroot/output/host/arm-buildroot-linux-gnueabihf/sysroot/. Of course, replace /path/to/buildroot/ with the appropriate path on your system.
For the compiler, click on Manage, then in the Compiler panel:
Add one GCC C compiler, with the name Buildroot GCC and pointing to /path/to/buildroot/output/host/bin/arm-linux-gnueabihf-gcc
Add one GCC C++ compiler, with the name Buildroot G++ and pointing to /path/to/buildroot/output/host/bin/arm-linux-gnueabihf-g++
Back in the Kits panel, select Buildroot GCC and Buildroot G++ as the C and C++ compilers, respectively.
For the debugger, click on Manage, then in the debugger panel add one debugger named Buildroot GDB, and pointing to /path/to/buildroot/output/host/bin/arm-linux-gnueabihf-gdb. Back in the Kits panel, select Buildroot GDB as our debugger.
For the Qt version, click on Manage, then on Add, and point to the qmake binary in /path/to/buildroot/output/host/bin/. It will auto-detect that Buildroot has built Qt 5.11.3. You may want to adjust the version name from Qt %{Qt:Version} (host) to Qt %{Qt:Version} (Buildroot), as this Qt version is clearly not built for our host PC. Then back in the Kits panel, select this new Qt version.
For the Qt mkspec, enter devices/linux-buildroot-g++, which is the name of the mkspec configuration Buildroot generates.
You’ll find below screenshots of the various panels, with the details related to the Buildroot cross-compiler, cross-debugger and Qt installation:
Qt Creator Kits panel, filled in with the details of the Buildroot cross-compiler, cross-debugger and Qt installationQt Creator compiler panel, filled in with the details of the Buildroot C compilerQt Creator compiler panel, filled in with the details of the Buildroot C++ compilerQt Creator debugger panel, filled in with the details of the Buildroot cross-debuggerQt Creator Qt version panel, filled in with the details of the Buildroot Qt installation
We’re now done configuring a Kit!
Creating a device
In order to allow Qt Creator to deploy our application to the device, run it and debug it, we need to create a Device. Go again in Tools -> Options, and this time go to the Devices panel.
In the first window, select Generic Linux Device.
Then, for the device name, use STM32MP15 Discovery board for example, for the IP address, 192.168.42.2 and for the user, root, which should give:
In the next step about Key deployment, simply skip to the next section, as we have not created a private/public key pair, as explained previously in this blog post. You can then finalize the device creation. Qt Creator will now test that it can communicate as expected with our device:
As you can see, it doesn’t find rsync on the target, because we have not installed it. It will use sftp instead, which is fine.
Back in the Device panel, you should see our device definition as follows:
Qt Creator device panel, filled in with the details of our STM32MP15 Discovery board
You can click on Open Remote Shell to directly open a shell over SSH to your target, or Show Running processes.
Our device is now set up correctly, time to create our first application!
Importing our project
We now want to import our qt-sensor-demo project in Qt Creator. To do so, go in File -> Open File or Project, then browse to the directory containing our qt-sensor-demo application, and select both the main.cpp and qt-sensor-demo.pro files, and click Open. Qt Creator should now switch to a Configure project window, where it asks you to select the Kit to use for this project. Obviously, select the Buildroot ARM kit we have just created, and validate by clicking Configure Project:
You should now see our project imported, with both of its files, and main.cpp is opened by default:
If we now use Build -> Build All, and then go in the Compile Output panel, we see:
13:11:58: Running steps for project qt-sensor-demo...
13:11:59: Starting: "/home/thomas/projets/outputs/st/host/bin/qmake" /home/thomas/qt-sensor-demo/qt-sensor-demo.pro -spec devices/linux-buildroot-g++ CONFIG+=debug CONFIG+=qml_debug
Info: creating stash file /home/thomas/build-qt-sensor-demo-Buildroot_ARM-Debug/.qmake.stash
13:11:59: The process "/home/thomas/projets/outputs/st/host/bin/qmake" exited normally.
13:11:59: Starting: "/usr/bin/make" -f /home/thomas/build-qt-sensor-demo-Buildroot_ARM-Debug/Makefile qmake_all
make: Nothing to be done for 'qmake_all'.
13:11:59: The process "/usr/bin/make" exited normally.
13:11:59: Starting: "/usr/bin/make" -j4
/home/thomas/projets/outputs/st/host/bin/arm-linux-gnueabihf-g++ -c -pipe -D_LARGEFILE_SOURCE -D_LARGEFILE64_SOURCE -D_FILE_OFFSET_BITS=64 -Os -Og --sysroot=/home/thomas/projets/outputs/st/host/arm-buildroot-linux-gnueabihf/sysroot -g -Wall -W -D_REENTRANT -fPIC -DQT_QML_DEBUG -DQT_WIDGETS_LIB -DQT_GUI_LIB -DQT_CORE_LIB -I../qt-sensor-demo -I. -I../projets/outputs/st/host/arm-buildroot-linux-gnueabihf/sysroot/usr/include/qt5 -I../projets/outputs/st/host/arm-buildroot-linux-gnueabihf/sysroot/usr/include/qt5/QtWidgets -I../projets/outputs/st/host/arm-buildroot-linux-gnueabihf/sysroot/usr/include/qt5/QtGui -I../projets/outputs/st/host/arm-buildroot-linux-gnueabihf/sysroot/usr/include/qt5/QtCore -I. -I../projets/outputs/st/host/mkspecs/devices/linux-buildroot-g++ -o main.o ../qt-sensor-demo/main.cpp
/home/thomas/projets/outputs/st/host/bin/arm-linux-gnueabihf-g++ --sysroot=/home/thomas/projets/outputs/st/host/arm-buildroot-linux-gnueabihf/sysroot -o qt-sensor-demo main.o -lQt5Widgets -lQt5Gui -lQt5Core -lrt -ldl -latomic -lpthread
13:12:00: The process "/usr/bin/make" exited normally.
13:12:00: Elapsed time: 00:02.
So we see that it is invoking qmake from Buildroot, and then running make, which builds our application, with the appropriate cross-compiler provided by Buildroot!
The application has been built in /home/thomas/build-qt-sensor-demo-Buildroot_ARM-Debug, which contains:
-rw-rw-r-- 1 thomas thomas 620760 30 août 13:12 main.o
-rw-rw-r-- 1 thomas thomas 31522 30 août 13:11 Makefile
-rwxrwxr-x 1 thomas thomas 516504 30 août 13:12 qt-sensor-demo
Running the application on the target
In order for Qt to deploy our application on the target, we need to adjust our .pro file so that it has directives to install the application. We’ll simply make our .pro file look like this:
We invite you to read the relevant part of the Qt documentation to get details about the INSTALLS directive and the special target keyword.
Before we can really deploy on your target, we need to adjust the Run configuration, so click on the Project icon in the left bar, which should bring you to:
We’re seeing the Build settings, so click on Run to see the Run settings. Everything should already be auto-detected: we want to deploy qt-sensor-demo to /usr/bin on the target, the target is STM32MP15 Discovery board. The only thing we need to change is to set Command line arguments to -platform linuxfb. Your settings should then look like this:
Now, you can finally do Build -> Run. Qt Creator will prompt you for the root password of your target, and automatically deploy and run the application!
Just to test it, make a change to the QPushButton label, and do Build -> Run again. You’ll see the new version of your application running!
Debugging your application
The last part in setting up our development environment is to be able to debug our application from Qt Creator. This involves remote debugging, where the debugger runs on your workstation, while the program being debugged runs on a separate target. As part of the Kit definition done previously, we have already told Qt Creator where the cross debugger provided by Buildroot is.
Now, we need to have gdbserver on the target, which is the program with which the cross-debugger will communicate to control the execution of our application on the target. To achieve this, go to the Buildroot menuconfig, and enable the option BR2_TOOLCHAIN_EXTERNAL_GDB_SERVER_COPY, in Toolchain -> Copy gdb server to the Target. With this done, we now need to have Buildroot take this change into account. Unfortunately simply running make will not take this change into account (see here for more details). We could do a full clean rebuild of Buildroot (make clean all), but that would take quite some time, so we’ll ask Buildroot to only reinstall the toolchain package and regenerate the root filesystem image:
make toolchain-external-arm-arm-reinstall all
Reflash your SD card, and reboot the system. You should now have gdbserver available on the target:
# ls -l /usr/bin/gdbserver
-rwxr-xr-x 1 root root 355924 Aug 29 2019 /usr/bin/gdbserver
We’ll now change a bit our program with some additional dummy code to play around with the debugger:
Place a breakpoint on the line QApplication app(argc, argv) by clicking to the left of this line, it should show a red dot, like this:
Then you can start debugging by clicking on the following button in the left bar:
It will switch to the debug view, with the program stopped at our breakpoint:
At the bottom of the screen, click on Application Output so that we can see the stdout of the application running on the target. Now hit F10 to step through our code line by line. You should then see the value of the variable a updated in the top right panel, and the Test 1 and then Test 2 messages printed in the application output:
So, as expected, we are able to debug our application! This concludes the setup of Qt Creator, which allows us to very easily make a change to our application, build it, deploy it on the target and debug it.
Building using a Buildroot package
Before we conclude this article, we want to see how to integrate the build of our application with Buildroot. Indeed, building the application manually or through Qt Creator is perfectly fine during the active development of the application. But in the end, we want Buildroot to be able to build our complete system, including all the applications and libraries we have developed, in a fully automated and reproducible fashion.
To achieve this, in this section, we’ll create a Buildroot package for our qt-sensor-demo application. A package in Buildroot speak is a small set of metadata that tells Buildroot how to retrieve and build a particular piece of software.
To learn how to create a Buildroot package, we suggest you to read the relevant section of the Buildroot manual, or to read the slides of our Buildroot training course. The following steps will however guide you in the process of creating our qt-sensor-demo package.
First, in the Buildroot source tree, create a package/qt-sensor-demo/ directory. Then, create a file named package/qt-sensor-demo/Config.in, which describes one configuration option to be able to enable/disable this package from Buildroot’s menuconfig:
config BR2_PACKAGE_QT_SENSOR_DEMO
bool "qt-sensor-demo"
depends on BR2_PACKAGE_QT5
select BR2_PACKAGE_QT5BASE_WIDGETS
help
This is the qt-sensor-demo application.
Note that the bool, depends on, select and help keywords need to be prefixed with a tab (not spaces), and that the BR2_PACKAGE_QT_SENSOR_DEMO string should be exactly as-is, as it needs to match the name of the directory qt-sensor-demo.
This Config.in file basically creates a boolean option which will appear as qt-sensor-demo in menuconfig. The depends on BR2_PACKAGE_QT5 definition ensures that our option will only be selectable if Qt5 is available, while select BR2_PACKAGE_QT5BASE_WIDGETS makes sure Qt5 will be built with QtWidgets support, as we use them.
Now, edit the existing package/Config.in file, and at a relevant place (perhaps Graphic libraries and applications, submenu Graphic applications), you need to add:
source "package/qt-sensor-demo/Config.in"
So that Buildroot’s menuconfig properly includes and reads our new package Config.in file. Now, if you run make menuconfig in Buildroot, you should be able to see our new option and enable it. Of course for now, it doesn’t do anything useful.
The next step is to create a qt-sensor-demo.mk file in package/qt-sensor-demo/ to teach Buildroot how to build our package. This .mk file is a Makefile, which uses a number of Buildroot-specific variables and macros, to a point where it doesn’t really look like a typical Makefile. In our case, qt-sensor-demo.mk will look like this:
The first two variables, QT_SENSOR_DEMO_SITE and QT_SENSOR_DEMO_SITE_METHOD tell Buildroot how to retrieve the source code for this application. Most Buildroot packages retrieve tarballs of source from HTTP servers, or clone source code from Git repositories. But in the case of our package, we are simply taking the source from the qt-sensor-demo directory, located just one level up from the main Buildroot source directory.
The QT_SENSOR_DEMO_DEPENDENCIES variable tells Buildroot that the qt5base package needs to be built before qt-sensor-demo gets built.
The QT_SENSOR_DEMO_CONFIGURE_CMDS variable describes the commands to run to configure our package. Here, we simply call Qt’s qmake utility, using the Buildroot-provided variable QT5_QMAKE.
The QT_SENSOR_DEMO_BUILD_CMDS variable describes the commands to run to build our package. In our case, we invoke make in the application directory, $(@D), passing appropriate variables in the environment ($(TARGET_MAKE_ENV)).
Then, the QT_SENSOR_DEMO_INSTALL_TARGET_CMDS variable describes the commands to run to install our package. We simply copy the qt-sensor-demo executable from the build directory ($(@D)) to usr/bin in the target directory.
Finally, the generic-package macro invocation is what triggers the Buildroot machinery to create a package. Read the Buildroot manual and/or our Buildroot training slides for more details.
With this in place, if you have already enabled qt-sensor-demo in menuconfig, when you run make in Buildroot, you should see:
Buildroot copying the source code from its original location to the Buildroot build directory
Buildroot configuring the build of our package by invoking qmake
Buildroot building our application
Buildroot installing our application
The application being installed in Buildroot’s target directory, it is automatically part of the root filesystem image, and consequently the SD card image sdcard.img. You can flash it again, and see that you have the same application.
Now, if you want to change the source code of your application, you can simply change it in its original location, the qt-sensor-demo directory, and issue the following command in Buildroot:
$ make qt-sensor-demo-rebuild all
Buildroot will synchronize again the source code from its original directory to Buildroot’s build directory, and rebuild the application. It will only transfer the files that have changed, and only rebuild the files that have changed. The all target ensures that the root filesystem and SD card images get regenerated with the new version of the code.
Conclusion
In this article, we’ve seen many things:
How to create and manually build our first Qt5 application
How to deploy our application to the target by adding it to the SD card
How to set up network communication, and SSH, to deploy our application more efficiently during development
How to set up Qt Creator as a development environment to write, build, deploy and debug our application
How to create a Buildroot package to automate the build of our application
You can find the Buildroot changes corresponding to this blog post in the 2019.02/stm32mp157-dk-blog-4 branch of our repository. The qt-sensor-demo application code can be found in the blog-4 branch of this application Git repository.
In our next blog post, we’ll extend our qt-sensor-demo application to make it really useful!
Kernel Recipes has become over the past few years a well-known conference, with an interesting line-up of speakers and an audience limited to 100-150 attendees giving a particular atmosphere to this event. Bootlin engineers have regularly participated and gave several talks at Kernel Recipes or Embedded Recipes in previous editions (2013, 2016, 2017, 2018).
This year, Bootlin engineer Grégory Clement will participate to the 3 days of Kernel Recipes in Paris, on September 25-27. Do not hesitate to get in touch with Grégory during the event, to discuss Linux kernel development, embedded Linux, career or business opportunities with Bootlin.
The next edition of the Linux Plumbers conference will take place from September 9 to September 11 in Lisbon, Portugal. A number of engineers from Bootlin will participate to Linux Plumbers, to attend the Networking Summit track and many of the other micro-conferences organized as part of this event.
Drawing from Mylène Josserand, based on a picture from Samuel Blanc (https://commons.wikimedia.org/wiki/File:Manchot_royal_-_King_Penguin.jpg)Linux 5.2 was released not long ago, and as usual it is time to have a look at the contributions that Bootlin engineers did to this kernel release. But before that, if you’re interested in having an overview of the major new features of this kernel, we recommend reading LWN articles covering the 5.2 merge window period: part 1 and part 2. KernelNewbies also has an interesting page about Linux 5.2.
With 350 patches contributed by Bootlin engineers, Bootlin is the 10th contributing company by number of commits for the Linux 5.2 release. With 186 commits, Alexandre Belloni is the second contributor to this release by number of commits (see also the detailed statistics from LWN.net).
Here are the highlights of our contributions:
In the RTC subsystem
Alexandre Belloni (maintainer of the subsystem) was very active in fixing a large number of drivers to use more modern APIs/mechanisms of the RTC core: use of rtc_time64_to_tm()/rtc_tm_to_time64(), use of devm_rtc_allocate_device(), etc.
Alexandre Belloni improved the pcf85063 driver with new features: alarm support, Micro Crystal RV8263 support, nvram support, offset correction support, RTC_VL_READ/RTC_VL_CLR support
In the support for the Microchip MPU (formerly Atmel) platforms
Alexandre Belloni continued the rework of the AT91/SAMA5 clock drivers, adding support for the new sam9x60 SoC using the new clock driver logic and DT binding
Alexandre Belloni dropped support for the AVR32 architecture and platform_data probing in the atmel_lcdfb driver, since AVR32 has been removed from the kernel
Alexandre Belloni also worked on the clocksource support on Microchip platforms. First, he made the TCB clocksource driver independent from the common atmel_tclib driver, so that TCB timers can be registered early enough in the kernel boot process. Then, he introduced the possibility of selecting the clocksource between TCB and PIT on Microchip platforms that support both. And finally modified the atmel_tclib driver to no longer use TCB timers that are used by the TCB clocksource driver registered early at boot time. The main motivation for this work is that some of the latest Microchip SoCs only have TCB timers available, and no longer the PIT, so we really needed to be able to use TCB as clocksource.
In the support for Marvell platforms
Maxime Chevallier contributed a number of patches to the mvpp2 Ethernet controller driver, adding support for classification offloading. This allows the HW to directly classify received network packets according to various details of their header, and steer them to the appropriate RX queue.
Maxime Chevallier contributed 2500Base-X support for the mvneta Ethernet controller driver.
In the support for Allwinner platforms
Miquèl Raynal contributed DMA support in the sunxi NAND controller driver, for the A23 and A33 SoC, significantly improving NAND read/write performance.
Paul Kocialkowski contributed a new Device Tree to support the RerVision H3-DVK platform
Quentin Schulz added support for the AXP813 PMIC in the axp20x_usb_power driver, and made a few other related contributions
Maxime Ripard made several improvements in the Allwinner DRM sun4i driver, especially improving the support for MIPI DSI display panels: the driver will now support a wider range of panels connected over DSI.
Maxime Ripard contributed many new DT bindings written in YAML, and as part of this, fixed a number of issues in the Allwinner platform Device Trees.
In the support for the NXP LPC3250 platform
Alexandre Belloni fixed a number of issues in the lpc32xx USB gadget driver, and added support for using the stotg04 USB PHY
Grégory Clement made a few cleanups in the lpc32xx IIO ADC driver, and added support for providing a scaled value and not just the raw ADC value
In the support for RaspberryPi platforms
Paul Kocialkowski finalized some work initially started by Boris Brezillon, to be able to track and detect the memory bandwidth used by the configuration of the RaspberryPi display engine, and prevent from making configurations that exhaust the available memory bandwidth.
In the MTD subsystem
Miquèl Raynal has become one of the co-maintainers of the MTD subsystem. He was already a co-maintainer for the NAND subsystem, which sits “under” MTD in the maintainer tree.
In the GPIO subsystem
Alexandre Belloni added support for the PCA6416 I2C GPIO expander to the existing gpio-pca953x driver
In the networking subsystem
Antoine Ténart implemented suspend/resume support in the Marvell 10G PHY driver, implemented a work-around for a HW errata in the Micrel PHY driver, and fixed an initialization issue in the same Micrel PHY driver.
In the IIO subsystem
Grégory Clement contributed a brand new IIO driver for the TI ADS8344 ADC chip, connected over SPI
Other topics
Maxime Ripard contributed some changes to the Device Tree address translation logic. Indeed, the Allwinner display engine does its DMA operations through a bus different from the bus used by the CPU core to access the display engine registers, and due to this, it sees the RAM at a different address. Thanks to the changes from Maxime, the DMA address translation now follows the interconnects property if it exists, instead of assuming the parent Device Tree node should be used.
Also, several of the engineers working at Bootlin are maintainers of specific parts of the kernel, and as part of their maintainer work, they review and merge patches from other contributors, before sending them to another upstream maintainer.
Miquèl Raynal, as one of the maintainers of the NAND and MTD subsystems, reviewed and merged 83 patches from other contributors
Maxime Ripard, one of two co-maintainers of the support for Allwinner processors, reviewed and merged 68 patches from other contributors
Alexandre Belloni, as the maintainer of the RTC subsystem and co-maintainer of the support for Microchip MPU processors, reviewed and merged 38 patches from other contributors
Grégory Clement, as the co-maintainer of the support for Marvell EBU processors, reviewed and merged 10 patches from other contributors
And as usual, the details of all contributions, commit by commit:
First of all, it is very important to distinguish the display controller from the GPU, as many people getting started with embedded systems and Linux tend to confuse both, while they are completely different things, both in terms of functionality and software support.
A display controller is an hardware block that takes the content of a memory area containing values representing the color of all pixels on your screen (a framebuffer) and sends it out to a display panel over hardware interfaces such as HDMI, DisplayPort, parallel interfaces or MIPI DSI. Some display controllers can take several framebuffers as input and compose them, potentially rescaling the size of some of them, and overlaying them with transparency. For example, some display controllers can take a framebuffer containing video frames, overlay another framebuffer that contains transparent pixels (to see the video) and some other pixels showing the UI of a video player, and another framebuffer overlayed on top of the two other ones that contains the mouse cursor. There are no 3D rendering or OpenGL operations involved: a display controller’s job is purely about taking framebuffer(s) contents and showing them on a display.
A GPU (or Graphics Processing Unit) is a very flexible programmable hardware unit, which among other things can be used to implement the OpenGL 3D rendering API, but also other APIs such as OpenCL. OpenGL and a GPU allow to offload in hardware the complex calculations that need to be done to render a 3D scene into a framebuffer of pixels. But a GPU by itself is not responsible at all for displaying on a screen what was rendered: it is the responsibility of a display controller.
Some system-on-chips only have a display controller, and no GPU at all, so you can display contents on one or several display panels, but you cannot benefit from hardware acceleration for 3D rendering. There are also use-cases where GPUs are used, but never to render anything looking like a 3D scene: that is for example the use-case for the OpenCL API, which allows to leverage the processing power of GPUs for general purpose programming.
In Linux, both display controllers and GPUs are managed by a Linux kernel subsystem called DRM, for Direct Rendering Manager. The DRM drivers are located in drivers/gpu/drm in the Linux kernel source code. If the hardware also has a GPU in addition to the display controller, then the most significant part of handling the GPU is done in user-space libraries implementing OpenGL. In the open-source world, the de-facto standard OpenGL implementation is Mesa3D, which has support for a number of different GPUs. From a GPU driver perspective, the kernel mainly serves as a way for the user-space OpenGL library to allocate buffers and send commands to the GPU.
The STM32MP15 has both a display controller and a GPU, but in this blog post, we are only going to make use of the display controller. The Linux kernel DRM driver used for the display controller of the STM32MP15 is in drivers/gpu/drm/stm. The driver can be enabled using the CONFIG_DRM_STM kernel configuration option.
In addition, the display panel used on the STM32MP15 Discovery Kit is connected to the SoC using the MIPI DSI interface. The STM32MP15 SoC contains a DSI encoder hardware block from Synopsys, and a glue driver for the DSI encoder is available in drivers/gpu/drm/stm/dw_mipi_dsi-stm.c and can be enabled using the CONFIG_DRM_STM_DSI option.
It turns out that the kernel configuration file we’re using since our initial blog post does have both of these options enabled, as well as the option providing support for the specific DSI display panel used on the Discovery board:
The user-space interface of DRM is detailed in its documentation. Typical applications do not use directly this interface, and instead rely on a display stack in user-space such as X.org or Wayland, or directly on a graphical toolkit like Qt.
In addition, the DRM subsystem implements a compatibility layer that emulates the Linux framebuffer user-space interface, as documented in framebuffer.txt. This allows to support older applications/libraries that don’t use DRM directly.
In our case, we are going to use the Qt graphical toolkit, and on embedded Linux systems, it has four main display backends: eglfs (which requires an OpenGL/EGL graphics stack), linuxfb (which uses a simple legacy framebuffer interface), wayland (for Wayland, obviously) and xcb (for X.org). To keep things simple for this series and blog post, and because we don’t require OpenGL support, we will use the linuxfb backend.
Touch panel support in the Linux kernel
The Linux kernel has a subsystem called input for all input devices, such as keyboards, mice, touchscreens, joysticks and more. Its user-space interface is described in details in the kernel documentation, and this interface is used by most display stacks in user-space. For example, Qt supports it through the backend called evdev.
In terms of hardware, the Discovery Kit display panel integrates a touch panel that uses a Focaltech FT6236 controller, connected over I2C. The Device Tree describes this touch panel device as follows:
The corresponding driver in the Linux kernel is drivers/input/touchscreen/edt-ft5x06.c, which can be enabled using the CONFIG_TOUCHSCREEN_EDT_FT5X06 kernel configuration option.
The input subsystem, its evdev interface, and the specific driver for our touch panel are all already enabled in the kernel configuration file we are using since our first blog post:
To test the touch panel and display, we can start with very simple tools instead of using directly a complex graphical stack. The tools we recommend to use are:
The evtest program from the project of the same name. It allows to dump input events from any input device.
The modetest program that comes from the libdrm project. It allows to test a display by showing some pre-defined pictures.
Let’s add those two software components in our Buildroot configuration: go to menuconfig, and enable the BR2_PACKAGE_EVTEST, BR2_PACKAGE_LIBDRM and BR2_PACKAGE_LIBDRM_INSTALL_TESTS options. Restart the build of the Buildroot system by running make, and once the build has completed, write the new SD card image to your SD card.
On the system, let’s have a look at available input device (output edited to fit in the blog post):
So input0 is our touch panel (connected on I2C bus 0, at address 0x2A), and event0 is its evdev user-space interface. This evdev interface is accessible through the /dev/input/event0 device file:
# ls -l /dev/input/event0
crw------- 1 root root 13, 64 Jan 1 1970 /dev/input/event0
Now we can run evtest. With no arguments, it shows the list of available input devices, their name, and allows use to chose the one we would like to test:
# evtest
No device specified, trying to scan all of /dev/input/event*
Available devices:
/dev/input/event0: generic ft5x06 (11)
/dev/input/event1: pmic_onkey
Select the device event number [0-1]: 0
Once evtest is running, press the touch panel, and you will see events reported like this:
Event: time 946685148.736402, type 3 (EV_ABS), code 57 (ABS_MT_TRACKING_ID), value 0
Event: time 946685148.736402, type 3 (EV_ABS), code 53 (ABS_MT_POSITION_X), value 259
Event: time 946685148.736402, type 3 (EV_ABS), code 54 (ABS_MT_POSITION_Y), value 428
Event: time 946685148.736402, type 1 (EV_KEY), code 330 (BTN_TOUCH), value 1
Event: time 946685148.736402, type 3 (EV_ABS), code 0 (ABS_X), value 259
Event: time 946685148.736402, type 3 (EV_ABS), code 1 (ABS_Y), value 428
These events show the coordinates of the press, and the actual press event (BTN_TOUCH).
With the touch panel working, let’s move on to the display. In fact, you know the display is already working: the fbcon kernel driver provides a console over the framebuffer, which is why you are seeing the Linux kernel messages on the screen. Nevertheless, let’s use the modetest program from libdrm. Without any argument, it just prints out some details about the available display hardware. First the encoders:
Encoders:
id crtc type possible crtcs possible clones
28 0 DPI 0x00000001 0x00000000
30 33 DSI 0x00000001 0x00000000
So the display controller has two encoders: one with a DPI interface (i.e parallel RGB interface) and one with a (MIPI) DSI interface.
We have a HDMI connector, which can be used with the encoder of id 28, that is the DPI encoder. Indeed, the RGB parallel interface of the STM32 processor is fed on the board into an HDMI transceiver, that goes out with HDMI signals on connector CN9. So from the point of view of the SoC, it is a parallel RGB interface, but thanks to the HDMI transceiver on the Discovery board, it is in fact usable as an HDMI connector.
The second connector is the DSI connector, which can be used with encoder of id 30, i.e the DSI encoder, which makes sense.
So let’s ask modetest to display its test picture on the DSI connector, which has id 31. The DSI panel resolution is 480×800, so we’ll use the following command:
# modetest -s 31:480x800
And voilà:
Now if we plug an HDMI screen to the HDMI connector, the modetest output about connector 29 changes as the connector is no longer disconnected:
So we can ask modetest to display a 1280×720 picture on the HDMI screen:
# modetest -s 29:1280x720
Enabling Qt5 support in Buildroot
Now that we have successfully tested the display and touchscreen, it is time to move on and use a powerful graphical toolkit for embedded Linux systems: Qt. Qt is already packaged in Buildroot, and therefore very easy to add to our system, including some examples. Simply enable the following options in your Buildroot configuration:
BR2_PACKAGE_QT5, which enables Qt as a whole, and automatically selects the core Qt module called qt5base
BR2_PACKAGE_QT5BASE_GUI, which enables GUI support in qt5base. The linuxfb backend is automatically selected, but provided the appropriate dependencies are enabled, other display backends can be enabled as well. In our case, we’ll use the linuxfb backend so the default selection will work for us.
BR2_PACKAGE_QT5BASE_WIDGETS, which enables the Qt5 Widget library, which allows to easily write graphical applications with buttons, text boxes, drop down lists and other familiar graphical widgets
BR2_PACKAGE_QT5BASE_EXAMPLES, to enable the example Qt5 applications
BR2_PACKAGE_QT5BASE_FONTCONFIG, to enable the fontconfig support in Qt. This allows Qt to discover the fonts available on our system to render text.
BR2_PACKAGE_DEJAVU, which will provide one font to render text. Without this, Qt applications would run, but no text would be rendered
Once these options are enabled, restart the build with make and rewrite the new image to your SD card.
Test Qt5 application
All the Qt examples are installed in /usr/lib/qt/examples/, so you can try all of them. Let’s start with the analogclock for example:
And a more “complete” and useful application, which as you can see does not fit very well on a 480×800 screen in portrait mode, but also allows to use the touchscreen:
To conclude this article, let’s have a look at the size of our filesystem size. After a completely clean build (make clean all), Buildroot can generate a nice graph of the filesystem size using make graph-size. In our case, it generates the following graph:
So the overall filesystem size is 58.7 MB, on which 34.4 MB come from Qt. But our Qt is compiled with examples, and the examples take up 16.7 MB (this is not visible on the graph, it was calculated by looking at the size of /usr/lib/qt/examples/) on the target). Also, the dejavu font package is quite large, with 9.6 MB.
Conclusion
You can find the exact Buildroot source code used to reproduce the system used in this article in the branch at 2019.02/stm32mp157-dk-blog-3.
In this article, we learned about how Linux manages display and input devices and how to test them with simple applications such as modetest and evtest. Then we looked at how to add the Qt library to our Buildroot configuration, and verify it is working using Qt example applications.
Our next blog post will cover how to build a real Qt application!
Over the past years, Bootlin engineers have accumulated significant knowledge and experience on the topic of display and graphics support in the Linux kernel, and based on this knowledge and experience, we have created a new training course: Displaying and rendering graphics with Linux.
This course targets engineers who need a detailed level of understanding of graphics concepts, graphics hardware and how the graphics stack is organized with Linux. The main topics covered are:
This course has a duration of two days, and is composed of lectures and demonstrations made by the trainer. It does not include practical labs, unlike all our other training courses. The development of the training materials is in progress, and they will be released under the same Creative Commons license that we use for all our training materials, once the first course has taken place (September 2019).
We can deliver this course on-site, anywhere in the world, please contact us for more details.
After showing how to build and run a minimal Linux system for the STM32MP157 Discovery board in a previous blog post, we are now going to see how to connect an I2C sensor, adjust the Device Tree to enable the I2C bus and I2C device, and how to adjust the kernel configuration to enable the appropriate kernel driver.
For this project, we wanted an I2C sensor that was at least capable of measuring the temperature, so we simply started by searching i2c temperature sensor on Amazon. After a bit of research, we found that the BME280 sensor from Bosch was available on several inexpensive break-out boards, and it already had a device driver in the upstream Linux kernel. When choosing hardware, it is always important to check whether it is already supported or not in the upstream Linux kernel. Having a driver already integrated in the upstream Linux kernel has a number of advantages:
The driver is readily available, you don’t have to integrate a vendor-provided driver, with all the possible integration issues
The driver has been reviewed by the Linux kernel maintainers, so you can be pretty confident of the code quality
The driver is using standard Linux interfaces, and not some vendor-specific one
The driver will be maintained in the long run by the kernel community, so you can continue to update your Linux kernel to benefit from security updates, bug fixes and new features
In addition, it also turns out that the BME280 sensor not only provides temperature sensing, but also pressure and humidity, which makes it even more interesting.
Among the numerous inexpensive BME280 break-out boards, we have chosen specifically this one, but plenty of others are available. The following details will work with any other BME280-based break-out board.
Connecting the I2C sensor
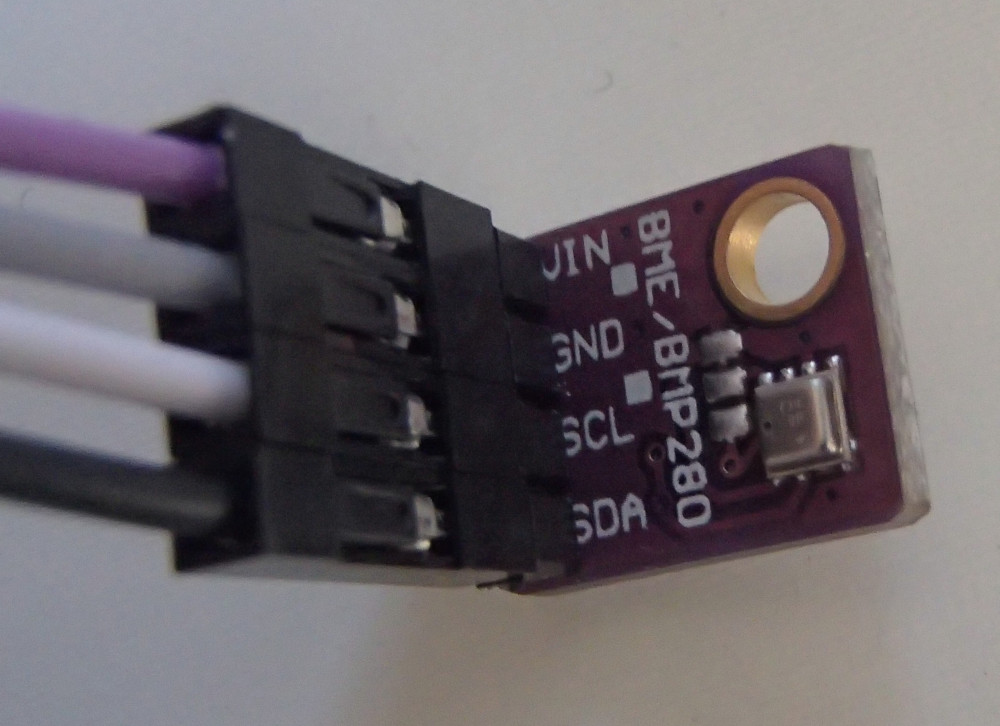
From a connectivity point of view, our I2C sensor is pretty simple: a VIN signal for power, a GND signal for ground, a SCL for the I2C clock and a SDA for the I2C data.
To understand how to connect this sensor to the Discovery board, we need to start with the board user manual.
The Discovery board has two main expansion connectors: CN2 and the Arduino connectors.
Connector CN2
Connector CN2 is a 40-pin male header on the front side of the board:
Section 7.17 of the board user manual documents the pin-out of this connector. There is one I2C bus available, through the I2C1_SDA (pin 27) and I2C1_SCL (pin 28) signals.
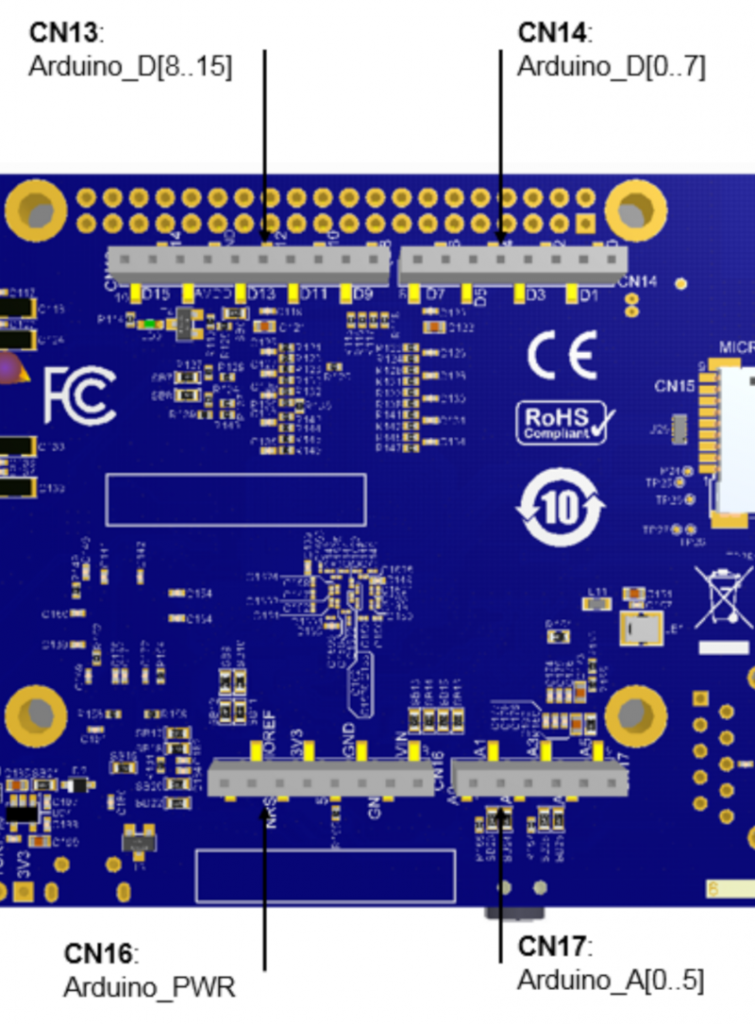
Arduino connectors
Connectors CN13, CN14, CN16, CN17 are female connectors on the back side of the board. They are compatible in pin-out and form-factor with the Arduino connector:
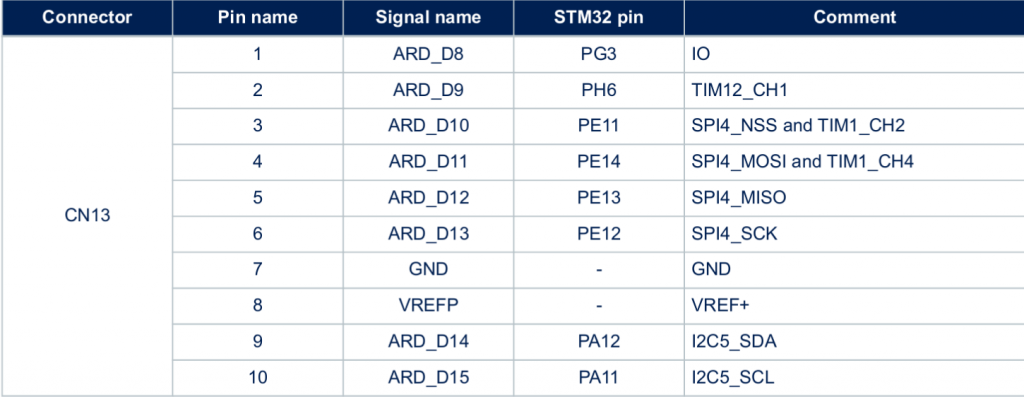
Section 7.16 of the board user manual documents the pin-out for these connectors. There is one I2C bus available as well in CN13, through the I2C5_SDA (pin 9) and I2C5_SCL (pin 10) signals.
Choosing the connector
According to the block diagram in Figure 3 of the board user manual, the I2C1 bus is already used to connect the touchscreen, the USB hub, the audio codec and the HDMI transceiver. However, I2C5 doesn’t seem to be used at all. In addition, with the screen mounted on the Discovery board, the CN2 connector is beneath the screen, which makes it a bit more difficult to use than the Arduino connectors on the back side.
We will therefore use the I2C5 bus, through the Arduino connector CN13. Pin 9 will be used to connect the data signal of our sensor, and pin 10 will be used to connect the clock signal of our sensor.
Finalizing the connectivity
We still have to find out how to connect the VIN and GND pins. According to the BME280 datasheet, VDDmain supply voltage range: 1.71V to 3.6V. The Arduino connector CN16 provides either 3.3V or 5V, so we’ll chose 3.3V (pin 4). And this connector also has multiple ground pins, among which we will chose pin 6.
Overall, this gives us the following connections:
Sensor signal
Arduino connector
Pin
VIN
CN16
pin 4
GND
CN16
pin 6
SDA
CN13
pin 9
SCL
CN13
pin 10
Here are a few pictures of the setup. First, on the sensor side, we have a purple wire for VIN, a grey wire for GND, a white wire for SCL and a black wire for SDA:
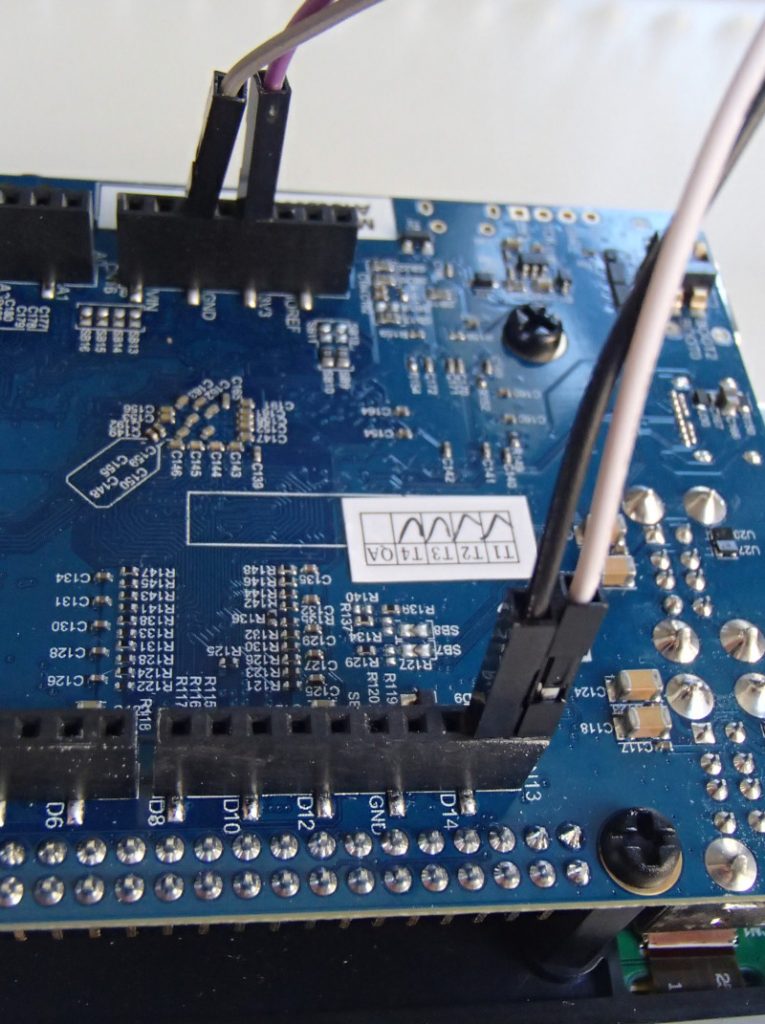
On the board side, we can see the purple wire (VIN) going to pin 4 of CN16, the grey wire (GND) going to pin 6 of CN16, the white wire (SCL) going to pin 10 of CN13 and the black wire (SDA) going to pin 9 of CN13.
With this we’re now all set in terms of hardware setup, let’s move on to enabling the I2C bus in Linux!
Enabling the I2C bus
An introduction to the Device Tree
In order to enable the I2C bus, we’ll need to modify the Device Tree, so we’ll first need to give a few details about what Device Tree is. If you read again our previous blog post in this series, we already mentioned the Device Tree. As part of the Buildroot build process, a file called stm32mp157c-dk2.dtb is produced, and this file is used at boot time by the Linux kernel: it is the Device Tree.
On most embedded architectures, devices are connected using buses that do not provide any dynamic enumeration capabilities. While buses like USB or PCI provide such capabilities, popular buses used on embedded architectures like memory-mapped buses, I2C, SPI and several others do not allow the operating system to ask the hardware: what peripherals are connected ? what are their characteristics ?. The operating system needs to know which devices are available and what their characteristics are. This is where the Device Tree comes into play: it is a data structure that describes in the form of a tree all the devices that we have in our hardware platform, so that the Linux kernel knows the topology of the hardware.
On ARM platforms, each particular board is described by its own Device Tree file. In our case, the STM32MP157 Discovery Kit 2 is described by the Device Tree file arch/arm/boot/dts/stm32mp157c-dk2.dts in the Linux kernel source code. This human-readable source file, with a .dts extension, is compiled during the Linux kernel build process into a machine-readable binary file, with a .dtb extension.
This stm32mp157c-dk2.dts describes the hardware of our Discovery Kit 2 platform. In fact, it only describes what is specific to the Discovery Kit 2: the display panel, the touchscreen, the WiFi and Bluetooth chip. Everything else is common with the Discovery Kit 1 platform, which is why the stm32mp157c-dk2.dts file includes the arm/boot/dts/stm32mp157a-dk1.dts file. Indeed, stm32mp157a-dk1.dts describes the hardware on the Discovery Kit 1, which is the same as the Discovery Kit 2, without the display, touchscreen and WiFi/Bluetooth chip.
In turn, the stm32mp157a-dk1.dts includes three other Device Tree files:
arm/boot/dts/stm32mp157c.dtsi, which describes all the devices inside the STM32MP157 system-on-chip. It will be used by all Device Tree files describing boards based on the STM32MP157 processor.
At this point, we won’t give much more generic details about the Device Tree, as it’s an entire topic on its own. For additional details, you could check the Device Tree for Dummies presentation from your author (slides, video) or the devicetree.org web site.
I2C controllers in the Device Tree
Zooming in to the topic of I2C, we can see that arm/boot/dts/stm32mp157c.dtsi describes 6 I2C controllers through six different nodes in the Device Tree:
i2c1: i2c@40012000
i2c2: i2c@40013000
i2c3: i2c@40014000
i2c4: i2c@5c002000
i2c5: i2c@40015000
i2c6: i2c@5c009000
This list of six I2C controllers nice matches the list of I2C controllers in the STM32MP157 datasheet, and their base address in the memory map, section 2.5.2:
In the file arm/boot/dts/stm32mp157a-dk1.dts, we can see that the I2C1 bus is enabled, and that a cs42l51 audio codec (I2C address 0x4a) and a sii9022 HDMI transceiver (I2C address 0x39) are connected to it:
to enable the bus. This piece of code adds the following Device Tree properties to the I2C5 Device Tree node:
status = "okay" which simply tells the Linux kernel: I really intend to use this device, so please enable whatever driver is needed to use this device
clock-frequency = <100000> tells Linux at which frequency we want to operate the I2C bus: in this case, 100 kHz
The pinctrl properties configure the pin muxing, so that the pins are configured in the I2C function when the system is running (the default state) and into a different state to preserve power when the system is in suspend to RAM (sleep state). Both i2c5_pins_a and i2c5_pins_sleep_a are already defined in arch/arm/boot/dts/stm32mp157-pinctrl.dtsi.
For now, this doesn’t describe any device on the bus, but should be sufficient to have the bus enabled in Linux. The question now is how to make this modification in our Device Tree in the proper way ?
Changing the Linux kernel source code
When Buildroot builds each package, it extracts its source code in output/build/<package>-<version>, so the source code of our Linux kernel has been extracted in output/build/linux-custom/. One could therefore be tempted to make his code changes directory in output/build/linux-custom/, but this has a number of major drawbacks:
output/build/linux-custom/ is not under version control: it is not part of a Linux kernel Git repository, so you can’t version control your changes, which is really not great
output/build/linux-custom/ is a temporary folder: if you do a make clean in Buildroot, this folder will be entirely removed, and re-created during the next Buildroot build
So, while doing a change directly in output/build/linux-custom/ is perfectly fine for quick/temporary changes, it’s not a good option to make changes that will be permanent.
To do this in a proper way, we will use a feature of Buildroot called pkg_OVERRIDE_SRCDIR, which is documented in section 8.12.6 Using Buildroot during development of the Buildroot manual. This feature allows to tell Buildroot: for a given package, please don’t download it from the usual location, but instead take the source code from a specific location on my system. This specific location will of course be under version control, and located outside of Buildroot, which allows to solve the two issues mentioned above.
So, let’s get set this up for the Linux kernel source code:
Start in the parent folder of Buildroot, so that the Linux kernel source code ends up being side-by-side with Buildroot
Clone the official upstream Linux kernel repository. Even though we could directly clone the STMicro Linux kernel repository, your author always finds it nicer to have the origin Git remote set up to the official upstream Git repository.
Fetch all the changes from the STMicro Linux kernel repository:
git fetch stmicro
Create a new branch, called bme280, based on the tag v4.19-stm32mp-r1.2. This tag is the one used by our Buildroot configuration as the version of the Linux kernel. The following command also moves to this new branch as the same time:
git checkout -b bme280 v4.19-stm32mp-r1.2
At this point, our linux/ folder contains the exact same source code as what Buildroot has retrieved. It is time to make our Device Tree change by editing arch/arm/boot/dts/stm32mp157c-dk2.dts and at the end of it, add:
Once done, we need to tell Buildroot to use our kernel source code, using the pkg_OVERRIDE_SRCDIR mechanism. To this, create a file called local.mk, in the top-level Buildroot source directory, which contains:
LINUX_OVERRIDE_SRCDIR = $(TOPDIR)/../linux
This tells Buildroot to pick the Linux kernel source from $(TOPDIR)/../linux. We’ll now ask Buildroot to wipe out its Linux kernel build, and do a build again:
$ make linux-dirclean
$ make
If you look closely at what Buildroot will do, it will do a rsync of the Linux kernel source code from your linux/ Git repository to output/build/linux-custom in Buildroot, and then do the build. You can check output/build/linux-custom/arch/arm/boot/dts/stm32mp157c-dk2.dts to make sure that your I2C5 change is there!
If that is the case, then reflash output/images/sdcard.img on your SD card, and run the new system on the board. It’s now time to test the I2C bus!
Testing the I2C bus
After booting the new system on your Discovery board and logging in as root, let’s have a look at all I2C related devices:
This folder is part of the sysfs filesystem, which is used by the Linux kernel to expose to user-space applications all sort of details about the hardware devices connected to the system. More specifically, in this folder, we have symbolic links for two types of devices:
The I2C busses: i2c-0, i2c-1, i2c-2 and i2c-3. It is worth mentioning that the bus numbers do not match the datasheet: they are simply numbered from 0 to N. However, the i2c-0 symbolic link shows it’s the I2C controller at base address 0x40012000, so it’s I2C1 in the datasheet, i2c-1 is at base address 0x40015000 so it’s I2C5 in the datasheet, and i2c-2 at base address 0x5c002000 is I2C4 in the datasheet. i2c-3 is special as it’s not an I2C bus provided by the SoC itself, but the I2C bus provided by the HDMI transmitter to talk with the remote HDMI device (since this is unrelated to our discussion, we won’t go into more details on this).
The I2C devices: 0-002a, 0-0038, 0-0039, 0-004a, 2-0028, 2-033. These entries have the form B-SSSS where B is the bus number and SSSS is the I2C address of the device. So you can see that for example 0-004a corresponds to the cs42l51 audio codec we mentioned earlier.
In our case, we are interested by I2C5, which is known by Linux as i2c-1. We will use the i2cdetect utility, provided by Busybox, to probe the different devices on this bus:
The device at 0x76 has disappeared, so it looks like our sensor is at I2C address 0x76. To confirm this, let’s have a look at what the BME280 datasheet says about the I2C address of the device, in section 6.2 I2C Interface:
So, the I2C address is indeed 0x76 when the SDO pin of the sensor is connected to GND, which is probably what our BME280 break-out board is doing. It matches the address we have detected with i2cdetect!
Now, let’s talk to our device. According to section 5.4 Register description of the datasheet, there is a Chip ID register, at offset 0xD0 that is supposed to contain 0x60:
We can read this register using the i2cget command:
# i2cget -y 1 0x76 0xd0
0x60
Good, this matches the expected value according to the BME280 datasheet, so it seems like communication with our I2C device is working, let’s move on to enabling the BME280 sensor driver.
Enabling the sensor driver
As discussed earlier, this BME280 sensor already has a driver in the upstream Linux kernel, in the IIO subsystem. IIO stands for Industrial Input/Output, and this subsystems contains a lot of drivers for various ADCs, sensors and other types of measurement/acquisition devices. In order to use this driver for our BME280 device, we will essentially have to do two things:
Enable the driver in our Linux kernel configuration, so that the driver code gets built as part of our kernel image
Describe the BME280 device in our Device Tree so that the Linux kernel knows we have one such device, and how it is connected to the system
Adjusting the kernel configuration
In the previous blog post, we explained that the Linux kernel configuration used to build the kernel for the STM32 Discovery board was located at board/stmicroelectronics/stm32mp157-dk/linux.config. Obviously, we are not going to edit this file manually: we need to run the standard Linux kernel configuration tools.
It turns out that Buildroot has convenient shortcuts to manipulate the Linux kernel configuration. We can run the Linux kernel menuconfig configuration tool by running:
$ make linux-menuconfig
At this point, it is really important to not be confused by the fact that both Buildroot and the Linux kernel use the same configuration utility, but each have its own configuration. The Buildroot configuration describes your overall system (target architecture, which software components you want, which type of filesystem you want, etc.) while the Linux kernel configuration describes the kernel configuration itself (which drivers you want, which kernel features you need, etc.). So make sure to not confuse the menuconfig of Buildroot with the menuconfig of the Linux kernel!
Once you have run make linux-menuconfig, the menuconfig of the Linux kernel will show up. You will then enable the following option:
Make sure to enable this option with a star <*> so that the driver is compiled inside the kernel image itself and not as a separate kernel module. You can then exit the menuconfig utility, and confirm that you want to save the configuration.
At this point, the Linux kernel configuration file in output/build/linux-custom/.config has been changed. You can confirm it by running:
However, as we explained earlier, the output/build/linux-custom/ folder is temporary: it would be removed when doing a Buildroot make clean. We would like to permanently keep our Linux kernel configuration. Once again, Buildroot provides a nice shortcut to do this:
$ make linux-update-defconfig
After running this command, the kernel configuration file board/stmicroelectronics/stm32mp157-dk/linux.config has been updated, and this file is not temporary, and is under version control. If you run git diff, you can see the change on this file:
We now need to tell the Linux kernel that we have a BME280 sensor and how it is connected to the system, which is done by adding more details into our Device Tree. We have already enabled the I2C5 bus, and we now need to describe one device connected to it: this gets done by creating a child node of the I2C controller node.
How do we know what to write in the Device Tree node describing the BME280 ? Using Device Tree bindings. Those bindings are specification documents that describe how a given device should be represented in the Device Tree: which properties are available, what are their possible values, etc. All Device Tree bindings supported by the Linux kernel are documented in Documentation/devicetree/bindings in the Linux kernel source code. For our BME280 device, the binding is at Documentation/devicetree/bindings/iio/pressure/bmp085.yaml.
This document tells us that we have one required property, the compatible property, with the range of possible values. Since we have a BME280 sensor, we’ll use bosch,bme280. The other properties are optional, so we’ll ignore them for now. This binding also documents a reg property, which is used to provide to the Linux kernel the I2C address of the device.
So, we’ll go back to our linux/ directory outside of Buildroot, where we cloned the Linux kernel repository, and we’ll adjust our Device Tree file arch/arm/boot/dts/stm32mp157c-dk2.dts so that it contains:
Let’s now ask Buildroot to rebuild the Linux kernel, with our Device Tree change and kernel configuration change. Instead of rebuilding from scratch, we’ll just ask Buildroot to restart the build of the Linux kernel, which will be much faster:
$ make linux-rebuild
As part of this, Buildroot will re-run rsync from our linux/ kernel Git repository to output/build/linux-custom/, so that we really build the latest version of our code, which includes our Device Tree change.
However, this just rebuilds the Linux kernel, and not the complete SD card image, so also run:
$ make
To regenerate the SD card image, write it on your SD card, and boot your system.
Testing the sensor
After booting the system, if we check /sys/bus/i2c/devices, a new entry has appeared:
If we following this symbolic link, we can see a number of interesting information:
# ls -l /sys/bus/i2c/devices/1-0076/
total 0
lrwxrwxrwx driver -> ../../../../../../bus/i2c/drivers/bmp280
drwxr-xr-x iio:device2
-r--r--r-- modalias
-r--r--r-- name
lrwxrwxrwx of_node -> ../../../../../../firmware/devicetree/base/soc/i2c@40015000/pressure@76
drwxr-xr-x power
lrwxrwxrwx subsystem -> ../../../../../../bus/i2c
-rw-r--r-- uevent
Here we can see that this device is bound with the device driver named bmp280, and that its Device Tree node is base/soc/i2c@40015000/pressure@76.
Now, to actually use the sensor, we need to understand what is the user-space interface provided by IIO devices. The kernel documentation gives some hints:
There are two ways for a user space application to interact with an IIO driver.
/sys/bus/iio/iio:deviceX/, this represents a hardware sensor and groups together the data channels of the same chip.
/dev/iio:deviceX, character device node interface used for buffered data transfer and for events information retrieval.
So, we’ll try to explore the /sys/bus/iio/ option:
Here we can see a number of IIO devices: our IIO device is iio:device2, as can be seen by looking at the target of the symbolic links. The other ones are IIO devices related to the ADC on the STM32 processor. Let’s check what we have inside /sys/bus/iio/devices/iio:device2/:
# ls -l /sys/bus/iio/devices/iio\:device2/
total 0
-r--r--r-- dev
-rw-r--r-- in_humidityrelative_input
-rw-r--r-- in_humidityrelative_oversampling_ratio
-rw-r--r-- in_pressure_input
-rw-r--r-- in_pressure_oversampling_ratio
-r--r--r-- in_pressure_oversampling_ratio_available
-rw-r--r-- in_temp_input
-rw-r--r-- in_temp_oversampling_ratio
-r--r--r-- in_temp_oversampling_ratio_available
-r--r--r-- name
lrwxrwxrwx of_node -> ../../../../../../../firmware/devicetree/base/soc/i2c@40015000/pressure@76
drwxr-xr-x power
lrwxrwxrwx subsystem -> ../../../../../../../bus/iio
-rw-r--r-- uevent
This is becoming interesting! We have a number of files that we can read to get the humidity, pressure, and temperature:
What: /sys/bus/iio/devices/iio:deviceX/in_tempX_input
Description:
Scaled temperature measurement in milli degrees Celsius.
What: /sys/bus/iio/devices/iio:deviceX/in_pressure_input
Description:
Scaled pressure measurement from channel Y, in kilopascal.
What: /sys/bus/iio/devices/iio:deviceX/in_humidityrelative_input
Description:
Scaled humidity measurement in milli percent.
So here we are: we are able to read the data from our sensor, and the Linux kernel driver does all the conversion work to convert the raw values from the sensors into usable values in meaningful units.
Turning our kernel change into a patch
Our Device Tree change is for now only located in our local Linux kernel Git repository: if another person builds our Buildroot configuration, he won’t have access to this Linux kernel Git repository, which Buildroot knows about thanks to the LINUX_OVERRIDE_SRCDIR variable. So what we’ll do now is to generate a Linux kernel patch that contains our Device Tree change, add it to Buildroot, and ask Buildroot to apply it when building the Linux kernel. Let’s get started.
First, go in your Linux kernel Git repository in linux/, review your Device Tree change with git diff, and if everything is alright, make a commit out of it:
$ git commit -as -m "ARM: dts: add support for BME280 sensor on STM32MP157 DK2"
Then, generate a patch out of this commit:
$ git format-patch HEAD^
This will create a file called 0001-ARM-dts-add-support-for-BME280-sensor-on-STM32MP157-.patch that contains our Device Tree change.
Now, back in Buildroot in the buildroot/ folder, create the board/stmicroelectronics/stm32mp157-dk/patches/ folder and a sub-directory board/stmicroelectronics/stm32mp157-dk/patches/linux. Copy the patch into this folder, so that the file hierarchy looks like this:
And in Build options, set global patch directories to the value board/stmicroelectronics/stm32mp157-dk/patches/. This tells Buildroot to apply patches located in this folder whenever building packages. This way, when the linux package will be built, our patch in board/stmicroelectronics/stm32mp157-dk/patches/linux/ will be applied.
We can now remove the local.mk file to disable the pkg_OVERRIDE_SRCDIR mechanism, and ask Buildroot to rebuild the Linux kernel:
$ rm local.mk
$ make linux-dirclean
$ make
If you pay attention to the Linux kernel build process, you will see that during the Patching step, our Device Tree patch gets applied:
>>> linux custom Patching
Applying 0001-ARM-dts-add-support-for-BME280-sensor-on-STM32MP157-.patch using patch:
patching file arch/arm/boot/dts/stm32mp157c-dk2.dts
You can of course reflash the SD card at the end of the build, and verify that everything still works as expected.
We can now share our Buildroot change with others: they can build our improved system which has support for the BME280 sensor.
Conclusion
You can find the exact Buildroot source code used to reproduce the system used in this article in the branch at 2019.02/stm32mp157-dk-blog-2.
In this article, we have learned a lot of things:
How to connect an I2C sensor to the Discovery board
What is the Device Tree, and how it is used to describe devices
How to use Buildroot’s pkg_OVERRIDE_SRCDIR mechanism
How to enable the I2C bus in the Device Tree and test its operation using i2cdetect and i2cget
How to change the Linux kernel configuration to enable a new driver
How to interact using sysfs with a sensor supported by the IIO subsystem
How to generate a Linux kernel patch, and add it into Buildroot
In our next article, we’ll look at adding support for the Qt5 graphical library into our system, as a preparation to developing a Qt5 application that will display our sensor measurements on the Discovery board screen.
As we announced recently, we are going to publish a series of blost post that describes how to build an embedded Linux device based on the STM32MP1 platform, using the Buildroot build system. In this first article, we are going to see how to create a basic Linux system, with minimal functionality. The hardware platform used in these articles is the STM32MP157-DK2.
List of articles in this series:
Building a Linux system for the STM32MP1: basic system
A Linux system is composed of a potentially large number of software components coming from different sources:
A bootloader, typically U-Boot, responsible for doing some minimal HW initialization, loading the Linux kernel and starting it
The Linux kernel itself, which implements features such as process management, memory management, scheduler, filesystems, networking stack and of course all device drivers for your hardware platform
User-space libraries and applications coming from the open-source community: command line tools, graphical libraries, networking libraries, cryptographic libraries, and more.
User-space libraries and applications developed internally, implementing the “business logic” of the embedded system
In order to assemble a Linux system with all those software components, one typically has two main choices:
Use a binary distribution, like Debian, Ubuntu or Fedora. Several of these distributions have support for the ARMv7 architecture. The main advantage of this solution is that it is easy: these binary distributions are familiar to most Linux users, they have a nice and easy-to-use package management system, all packages are pre-compiled so it is really fast to generate a Linux system. However, Linux systems generated this way are typically difficult to customize (software components are pre-built, so you cannot easily tweak their configuration to your needs) and difficult to optimize (in terms of footprint or boot time).
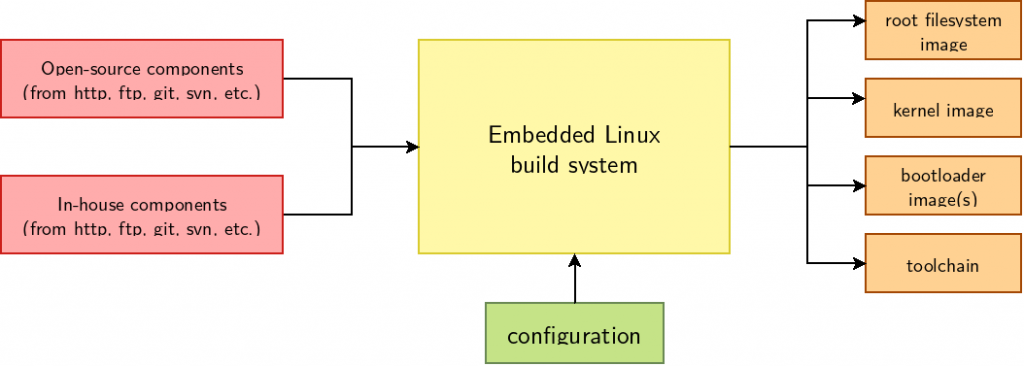
Use a build system, like Buildroot or Yocto/OpenEmbedded. These build systems build an entire Linux system from source code, which means that it can be highly customized and optimized to your needs. Of course, it is less simple than using a binary distribution and because you are building all components from source code, a non-negligible amount of CPU time will be spent on compiling code.
In this series of blog post, we have chosen to use Buildroot, which is an easy-to-use build system, which is a good match for engineers getting started with embedded Linux. For more general details about Buildroot, you can read the freely available training materials of our Embedded Linux development with Buildroot training course.
Buildroot is a set of Makefiles and script that automates the process of download the source code of the different software components, extract them, configure them, build them and install them. It ultimately generates a system image that is ready to be flashed, and which typically contains the bootloader, the Linux kernel image and the root filesystem. It is important to understand that Buildroot itself does not contain the source code for Linux, U-Boot or any other component: it is only a set of scripts/recipes that describes where to download the source code from, and how to build it.
Building the minimal system with Buildroot
Let’s started by getting the source of Buildroot from its upstream Git repository:
git clone git://git.buildroot.net/buildroot
cd buildroot
Starting a Buildroot configuration is then typically done by running make menuconfig, and then selecting all the relevant options for your system. Here, we are instead going to use a pre-defined configuration that we created for the STM32MP157-DK2 platform. This pre-defined configuration has been submitted to the upstream Buildroot project, but has not yet been merged as of this writing, so we’ll use an alternate Git branch:
The 2019.02/stm32mp157-dk branch in your author’s Buildroot Git repository is based on upstream Buildroot 2019.02.x branch and contains 4 additional patches needed to support the STM32MP157-DK2 platform.
Let’s continue by telling Buildroot to load the pre-defined configuration for the STM32MP157-DK2:
make stm32mp157_dk_defconfig
We could start the build right away, as this configuration works fine, but to illustrate how to modify the configuration (and speed up the build!) we will adjust one aspect of the system configuration. To do so, let’s run Buildroot’s menuconfig. People who have already configured the Linux kernel should be familiar with the tool, as it is the exact same configuration utility.
make menuconfig
At this point, if the command fails due to the ncurses library being missing, make sure to install the libcnurses-dev or ncurses-devel package on your Linux distribution (the exact package name depends on the distribution you’re using).
Once in menuconfig, go to the Toolchain sub-menu. By default the Toolchain type is Buildroot toolchain. Change it to External toolchain by pressing the Enter key. When Buildroot toolchain is selected, Buildroot builds its own cross-compiler, which takes quite some time. Selecting External toolchain tells Buildroot to use a pre-existing cross-compiler, which in our case is the one provided by ARM for the ARMv7 architecture.
Exit menuconfig and save the configuration. It is now time to start the build by running make. However, your author generally likes to keep the output of the build in a log file, using the following incantation:
make 2>&1 | tee build.log
Now that Buildroot starts by checking if your system has a number of required packages installed, and will abort if not. Please follow section System requirements > Mandatory packages of the Buildroot manual to install all the appropriate dependencies. Restart the make command once all dependencies have been installed.
The build process took 10 minutes on your author’s machine. All the build output is conveniently grouped in the sub-directory named output/, in which the most important results are in output/images/:
output/images/zImage is the Linux kernel image
output/images/stm32mp157c-dk2.dtb is the Device Tree Blob, i.e the piece of data that describes to the Linux kernel the hardware it is running on. We’ll talk more about Device Tree in the second blog post of this series
output/images/rootfs.{ext4,ext2} is the image of the root filesystem, i.e the filesystem that contains all the user-space libraries and applications. It’s using the ext4 filesystem format, which is the de-facto standard filesystem format in Linux for block storage.
output/images/u-boot-spl.stm32 is the first stage bootloader
output/images/u-boot.img is the second stage bootloader
output/images/sdcard.img is a complete, ready-to-use SD card image, which was generated from the previous images
Flashing and testing the system
First things first, we’ll need to write sdcard.img to a microSD card:
Of course, make sure that, on your system, the microSD card is really identified as /dev/mmcblk0. And beware that all the data on your microSD card will be lost!
Insert the microSD card in the microSD card connector of the STM32MP157-DK2 board, i.e connector CN15.
Connect a USB to micro-USB cable between your PC and the connector labeled ST-LINK CN11 on the board. A device called /dev/ttyACM0 will appear on your PC, through which you’ll be able to access the board’s serial port. Install and run a serial port communication program on your PC, your author’s favorite is the very minimalistic picocom:
picocom -b 115200 /dev/ttyACM0
Finally, power up the board by connecting a USB-C cable to connector PWR_IN CN6. You should then see a number of messages on the serial port, all the way up to Buildroot login:. You can then login with the root user, no password will be requested.
How is the system booting ?
Let’s look at the main steps of the boot process, by studying the boot log visible on the serial port:
This message is printed by the first stage bootloader, i.e the code contained in the file u-boot-spl.stm32, compiled as part of the U-Boot bootloader. This first stage bootloader is directly loaded by the STM32MP157 system-on-chip. This first stage bootloader must be small enough to fit inside the STM32MP157 internal memory.
This message is printed by the second stage bootloader, which was loaded from storage into external memory by the first stage bootloader. This second stage bootloader is the file u-boot.img, which was also compiled as part of the U-Boot bootloader.
These messages are printed by the second stage bootloader: we see it is loading the Linux kernel image (file zImage) and the Device Tree Blob describing our hardware platform (file stm32mp157c-dk2.dtb). It indicates that U-Boot has loaded both files into memory: it is now ready to start the Linux kernel.
Starting kernel ...
This is the last message printed by U-Boot before jumping into the kernel.
[ 0.000000] Booting Linux on physical CPU 0x0
[ 0.000000] Linux version 4.19.26 (thomas@windsurf) (gcc version 8.2.1 20180802 (GNU Toolchain for the A-profile Architecture 8.2-2018.11 (arm-rel-8.26))) #1 SMP PREEMPT Wed Apr 24 10:38:00 CEST 2019
And immediately after that, we have the first messages of the Linux kernel, showing the version of Linux and the date/time it was built. Numerous other kernel messages are then displayed, until:
This message indicates that the kernel has mounted the root filesystem. After this point, the kernel will start the first user-space process, so the next messages are user-space services being initialized:
Starting syslogd: OK
[...]
Welcome to Buildroot
buildroot login:
Until we reach a login prompt.
Exploring the system
After logging in as root, you have access to a regular Linux shell, with most basic Linux commands available. You can run ps to see the processes, run ls / to see the contents of the root filesystem, etc.
You can also play a bit with the hardware, for example to turn on and off one of the LEDs of the board:
So far, we have used a pre-defined Buildroot configuration, without really understanding what it does and how it built this basic system for our board. So let’s go back in make menuconfig and see how Buildroot was configured.
In the Target options menu, obviously the ARM Little Endian architecture was chosen, and more specifically Cortex-A7 was chosen as the Target Architecture Variant. Indeed the entire Linux system runs on the Cortex-A7 cores.
In the Build options menu, nothing was changed from the default values.
In the Toolchain menu, we previously modified to use an External toolchain to use a pre-existing cross-compiler and save on build time. All other options were kept as their default.
In the System configuration menu, we defined the following things:
Root filesystem overlay directories is set to board/stmicroelectronics/stm32mp157-dk/overlay/. This option tells Buildroot that the contents of the board/stmicroelectronics/stm32mp157-dk/overlay/ directory must be copied into the root filesystem at the end of the build. It allows to add custom files to the root filesystem.
Custom scripts to run after creating filesystem images is set to support/scripts/genimage.sh and the related option Extra arguments passed to custom scripts is set to -c board/stmicroelectronics/stm32mp157-dk/genimage.cfg. This tells Buildroot to call this genimage.sh script at the very end of the build: its purpose is to generate the final SD card image we have used.
In the Kernel menu, we have obviously configured which Linux kernel version and configuration should be used:
We are downloading the Linux kernel source code as a tarball from Github, using a custom Buildroot macro called github. Based on this information, Buildroot will go to the Git repository at https://github.com/STMicroelectronics/linux/, and get the kernel version identified by the tag v4.19-stm32mp-r1.2
Configuration file path is set to board/stmicroelectronics/stm32mp157-dk/linux.config. This is the file that contains the kernel configuration. We have prepared a custom kernel configuration to have a simple but working kernel configuration. Of course, it can be adjusted to your needs, as we will demonstrate in the next blog post.
We enabled the option Build a Device Tree Blob (DTB) and set In-tree Device Tree Source file names to stm32mp157c-dk2. This tells Buildroot to build and install the Device Tree Blob that matches our hardware platform.
Finally, we enabled Install kernel image to /boot in target, so that the kernel image and the Device Tree blob are installed inside the /boot directory in the root filesystem. Indeed, our U-Boot configuration will load them from here (see below).
In the Target packages menu, we have kept the default: only the BusyBox package is enabled. BusyBox is a very popular tool in the embedded Linux ecosystem: it provides a lightweight replacement for a Linux shell and most common Linux command line tools (cp, mv, ls, vi, wget, tar, and more). Our basic system in fact only contains BusyBox!
In the Filesystem images menu, we have enabled the ext2/3/4 root filesystem type and chosen the ext4 variant. As explained above, ext4 is kind of the de-facto standard Linux filesystem for block storage devices such as SD cards.
In the Bootloaders menu, we enabled U-Boot, where a significant number of options need to be tweaked:
This U-Boot comes with a pre-defined configuration called stm32mp15_basic, which we select using Board defconfig.
However, it turns out that this pre-defined configuration enables the STM32 watchdog, and since our Linux user-space does not have a watchdog daemon to tick the watchdog regularly, it would reset constantly. Using a small additional snippet of U-Boot configuration, stored in the file board/stmicroelectronics/stm32mp157-dk/uboot-fragment.config, we disable the watchdog. Of course, it should be re-enabled and properly handled in Linux user-space for a final product.
In the U-Boot binary format sub-menu, we tell Buildroot that the second stage bootloader image will be called u-boot.img, and this is the one Buildroot should install in output/images
We tell Buildroot that our U-Boot configuration will build a first stage bootloader called spl/u-boot-spl.stm32, which allows Buildroot to install it in output/images
Finally, we pass a custom DEVICE_TREE=stm32mp157c-dk2 option in the U-Boot environment, which is needed for the U-Boot build process to find the Device Tree used internally by U-Boot.
Finally, in the Host utilities menu, we enable the host genimage package.
This entire configuration is saved in a simple text file called configs/stm32mp157_dk_defconfig, which is the one we loaded initially when running make stm32mp157_dk_defconfig. We suggest you take a moment to look at configs/stm32mp157_dk_defconfig and see the configuration options it defines.
What happens during the Buildroot build?
With all these options in place, here is what Buildroot has done to build our system (we have omitted some intermediate steps or package dependencies for the sake of brievity):
Download and install the pre-built ARM compiler from ARM’s website, and install the C and C++ libraries inside the target root filesystem
Download the Linux kernel source code from STMicroelectronics Github repository, configure it with our configuration file, build it, install zImage and stm32mp157c-dk2.dtb both in output/images and in the target root filesystem in the /boot directory. It also installs the Linux kernel modules inside the target root filesystem
Download the U-Boot source code from STMicroelectronics Github repository, configure it, build it and install u-boot-spl.stm32 and u-boot.img in output/images
Download the Busybox source code from the project official website, configure it, build it and install it inside the target root filesystem.
Copies the contents of the rootfs overlay inside the target root filesystem
Produce the ext4 image of the root filesystem, and install it as output/images/rootfs.ext4
Call the genimage.sh script, whose purpose is to generate the final SD card image, output/images/sdcard.img
Let’s now have a look at the file board/stmicroelectronics/stm32mp157-dk/genimage.cfg, which tells the genimage utility how to create the final SD card image:
This file will contain a number of partitions, described by a GPT partition table. This is necessary for the STM32MP157 built-in ROM code to find the first stage bootloader.
The first two partitions are named fsbl1 and fsbl2, and contain the raw binary of the first stage bootloader, i.e there is no filesystem in those partitions. it is the STM32MP157 built-in ROM code that is hardcoded to search the first stage bootloader in the first two partitions whose name start with fsbl.
The third partition named uboot contains the second stage bootloader, also as a raw binary (no filesystem). Indeed, the first stage bootloader is configured to search the second bootloader from the third partition of the SD card (this is defined in the U-Boot configuration and can be modified if needed)
The fourth partition contains the ext4 filesystem image that Buildroot has produced, which is in fact our Linux root filesystem, with BusyBox, the standard C/C++ libraries and the Linux kernel image and Device Tree Blob.
This last partition is marked bootable. This is important because the U-Boot configuration for the STM32MP157 hardware platform by default uses the U-Boot Generic Distro Concept. At boot, U-Boot will search for the partition marked bootable, and then inside the filesystem contained in this partition, look for the file /boot/extlinux/extlinux.conf to know how to boot the system.
This file extlinux.conf is inside our root filesystem overlay at board/stmicroelectronics/stm32mp157-dk/overlay/boot/extlinux/extlinux.conf, so it is installed in our root filesystem as /boot/extlinux/extlinux.conf so that U-Boot finds it. This file simply contains:
Which tells U-Boot that the kernel image to load is /boot/zImage, that the Device Tree Blob to use is /boot/stm32mp157c-dk2.dtb and that the string root=/dev/mmcblk0p4 rootwait must be passed as arguments to the Linux kernel when booting. The root=/dev/mmcblk0p4 is particularly important, because it is the one telling the Linux kernel where the root filesystem is located.
So, if we summarize the boot process of our hardware platform with those new details in mind, it looks like this:
The STM32MP157 built-in ROM code looks for the GPT partitions whose name start with fsbl, and if one is found, loads the contents into the STM32 internal memory and runs it. This is our first stage bootloader.
This first stage bootloader is hard-coded to load the second stage bootloader from the third partition of the SD card. So it initializes the external RAM, loads this second stage bootloader into external RAM and runs it.
The second stage bootloader does some more initialization, and then looks for a partition marked bootable. It finds that the fourth partition is bootable. It loads the /boot/extlinux/extlinux.conf file, thanks to which it learns where the kernel and Device Tree are located. It loads both, and starts the kernel with the arguments also specified in the extlinux.conf file.
The Linux kernel runs, up to the point where it mounts the root filesystem, whose location is indicated by the root=/dev/mmcblk0p4 argument. After mounting the root filesystem, the kernel starts the first user-space process.
The first user-space process that runs is /sbin/init, implemented by BusyBox. It starts a small number of services, and then starts the login prompt.
Conclusion
You can find the exact Buildroot source code used to reproduce the system used in this article in the branch at 2019.02/stm32mp157-dk-blog-1.
In this long initial blog post, we have learned what Buildroot is, how to use it to build a basic system for the STM32MP157 platform, how the Buildroot configuration was created, and how the STM32MP157 platform is booting.
Stay tuned for the next blog post, during which we will learn how to plug an additional device to the board: a pressure, temperature and humdity sensor connected over I2C, and how to make it work with Linux.
Linux 5.1 was released a a few days ago by Linus Torvalds. As usual, LWN covered the major new features of this release by looking at what got merged during the merge window: part 1 and part 2. KernelNewbies also has a nice summary.
Bootlin contributed 181 commits to this release, making us the 14th contributing company by number of commits. Taking the entire Git history of the kernel, Bootlin has contributed a total of 6256 patches, making us the 15th contributing company by number of commits: a demonstration of our long-term involvement in the upstream Linux kernel community.
For Linux 5.1, our significant contributions have been:
In the RTC subsystem
Alexandre Belloni contributed a new RTC driver for the RV3028 RTC
Alexandre Belloni, as the maintainer of the RTC subsystem, continued to contribute a number of fixes/improvements in various RTC drivers
As part of a customer project in which we ported a modern U-Boot and Linux to a custom NXP LPC3250 platform, Alexandre Belloni contributed a fix for the LPC3250 serial port driver, and Grégory Clement moved the LPC3250 Analog-to-Digital converter Device Tree binding out of staging. We have other patches/fixes related to LPC3250 in the pipeline.
In the support for Marvell platforms
Antoine Ténart contributed numerous improvements to the mvpp2 driver, especially to properly handle the reset state of the different hardware blocks depending on how a particular Ethernet port is configured.
Grégory Clement contributed a new cpufreq driver to support CPU frequency scaling on Marvell Armada 8K
Maxime Chevallier contributed numerous improvements to the marvell10g Ethernet PHY driver, mainly to support 2.5G and 5G speeds, and to support the 88E2110 PHY. He also enabled 2.5G support in the mvpp2 Ethernet MAC driver.
Boris Brezillon made some fixes in the vc4 display controller driver: support for X/Y reflection was added, negative X/Y positioning was fixed, and support for margins on HDMI displays was added.
Paul Kocialkowski contributed a number of improvements to the support of YUV planes in the Allwinner display controller driver, in relation to our work on the Allwinner VPU support.
Paul Kocialkowski contributed some Device Tree changes to enable the Allwinner VPU on Allwinner A10, as well as a few fixes for the Allwinner VPU driver itself.
As listed below, Boris Brezillon converted the Allwinner NAND controller driver to the exec_op interface.
The NAND controller driver for Allwinner platform was converted to the use the new exec_op interface by Boris Brezillon.
In the GPIO subsystem
Thomas Petazzoni added support in the core GPIO subsystem to enable pull-up/pull-down resistors available in some GPIO controllers. It was contributed together with an implementation for the PCA953x family of I2C GPIO expanders.
In addition to writing code and submitting patches, a number of Bootlin engineers are also maintainers of various areas in the Linux kernel. As part of their maintainer duties, they review and merge patches from other developers:
Maxime Ripard, as the Allwinner platform maintainer, merged 76 patches from other developers
Alexandre Belloni, as the RTC subsystem maintainer and Atmel/Microchip platform co-maintainer, merged 53 patches from other developers
Miquèl Raynal, as the NAND subsystem maintainer, merged 38 patches from other developers
Grégory Clement, as the Marvell platform maintainer, merged 18 patches from other developers
And finally, here is as usual the detailed list of each patch we contributed:

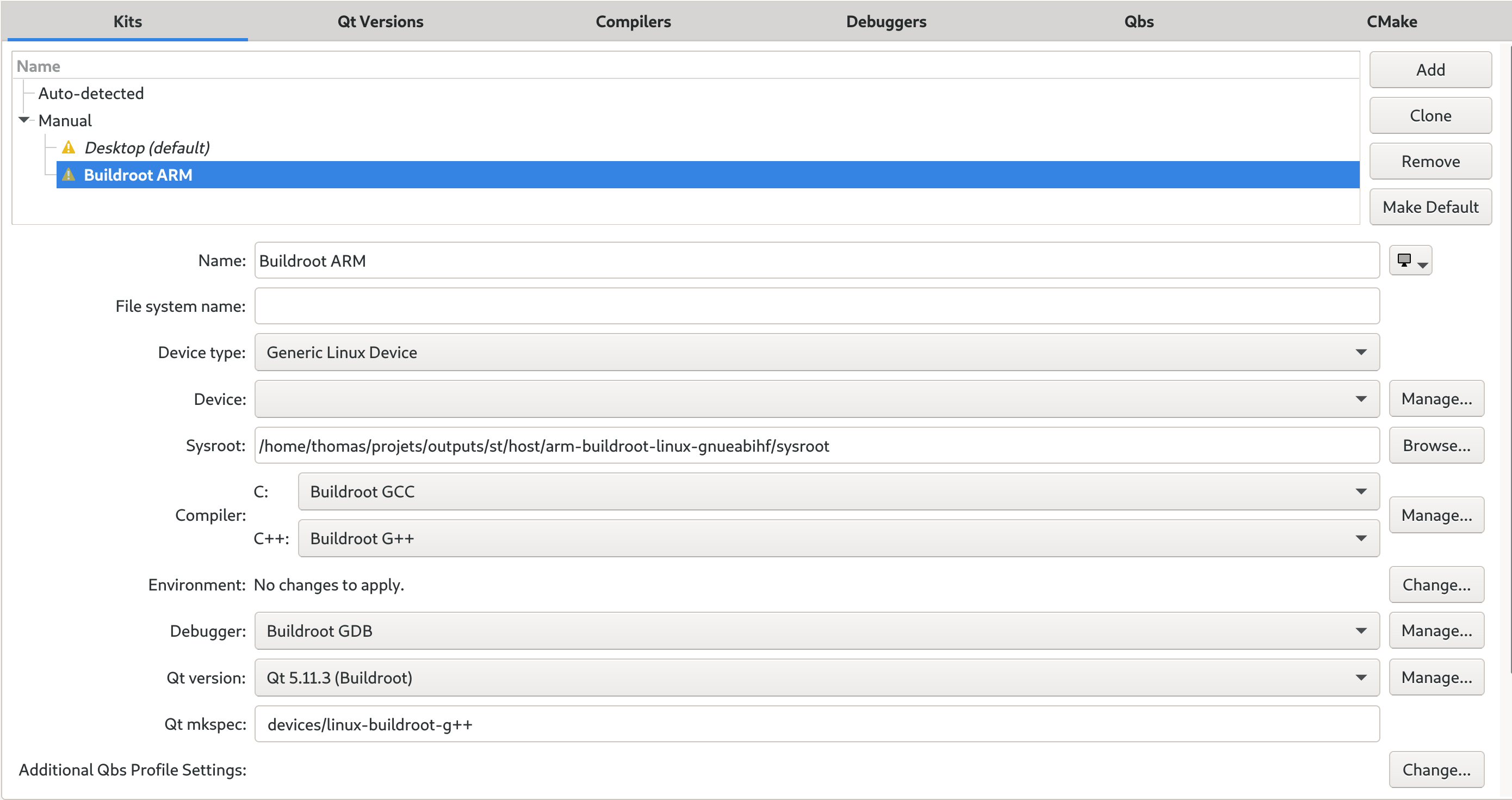
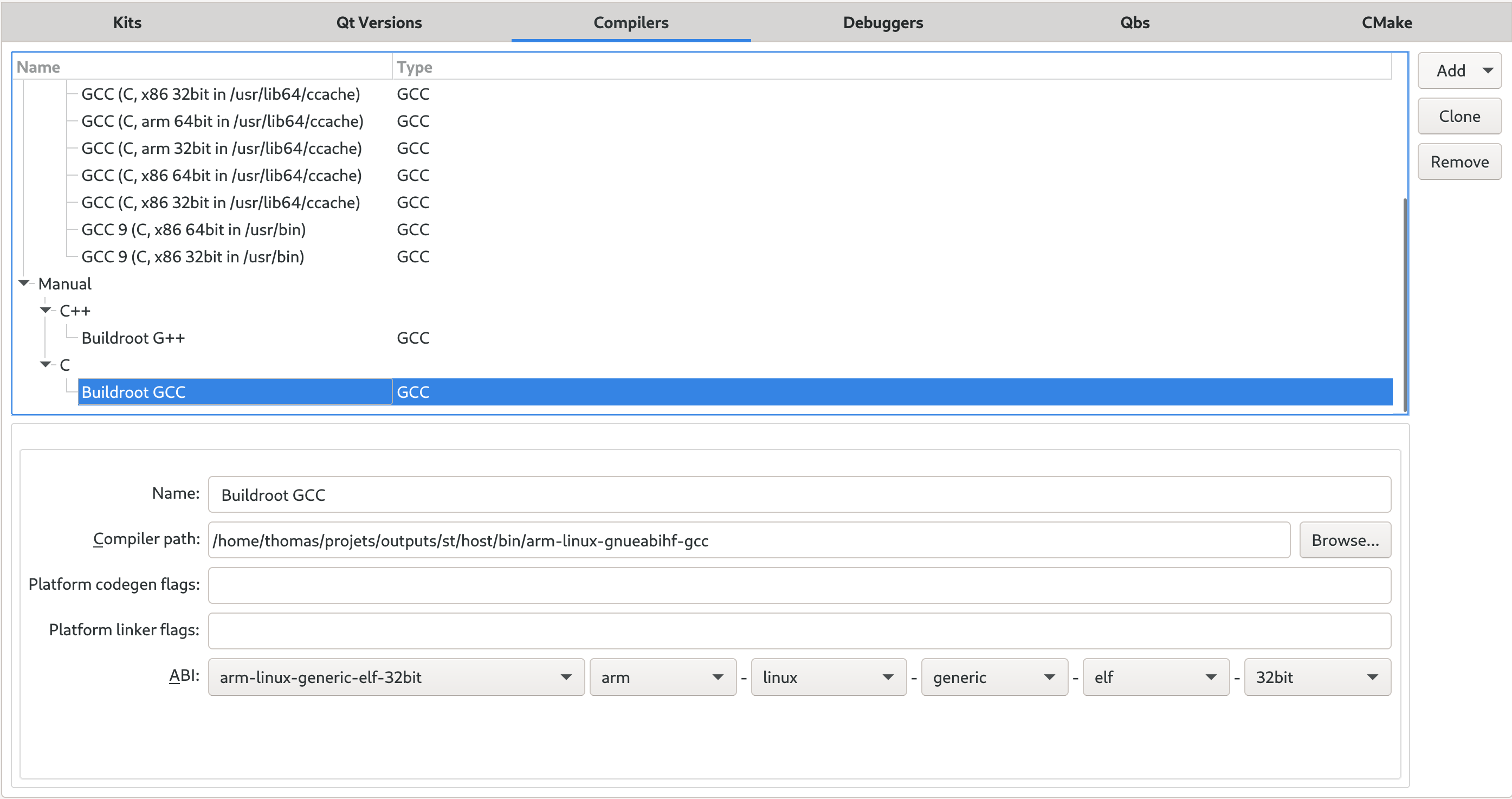

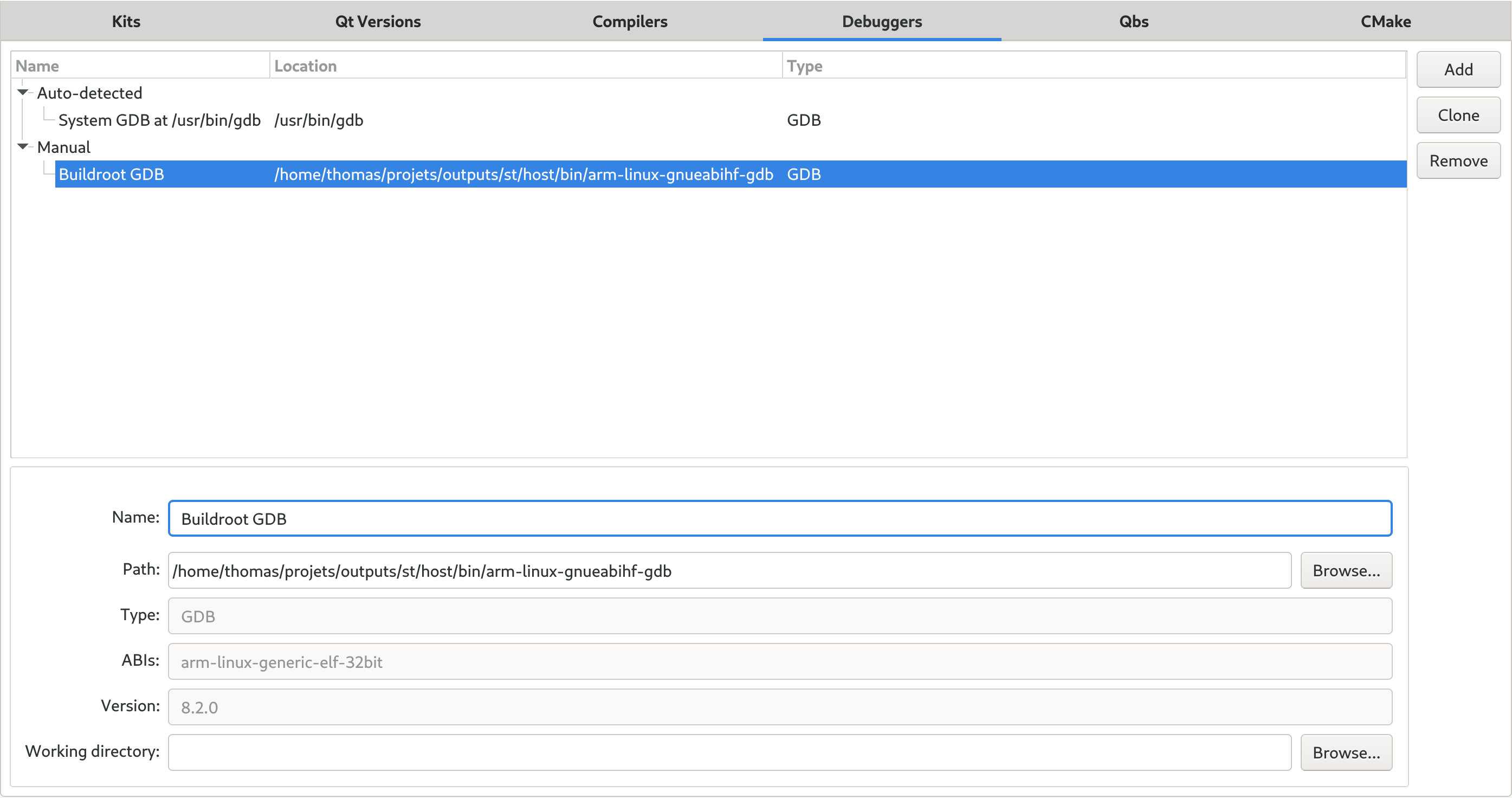
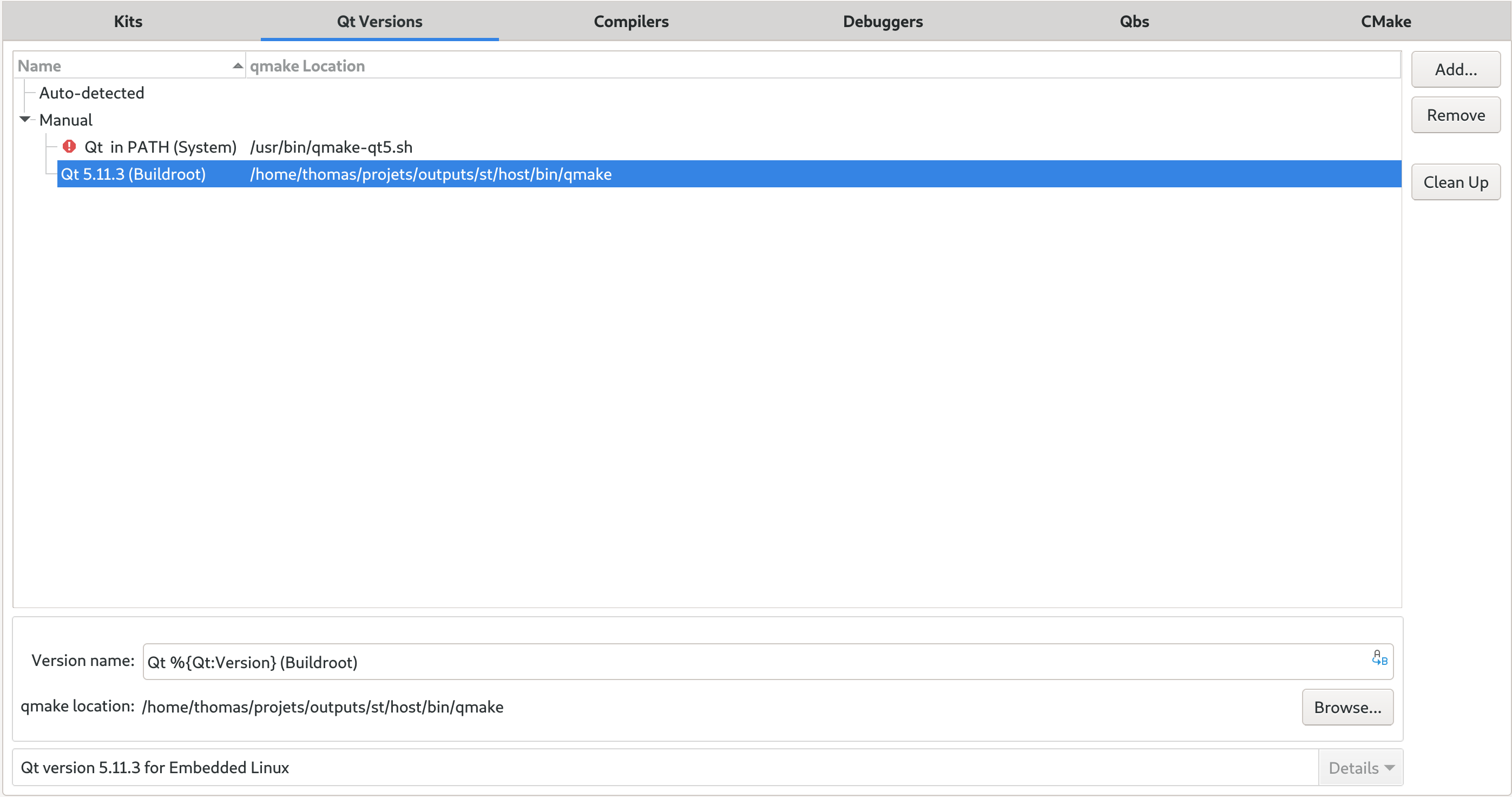
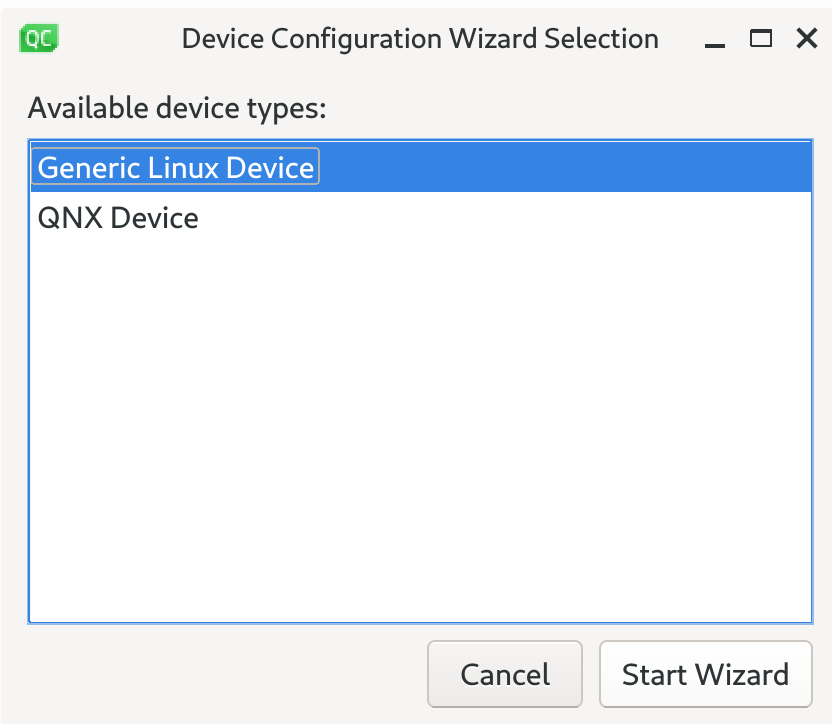
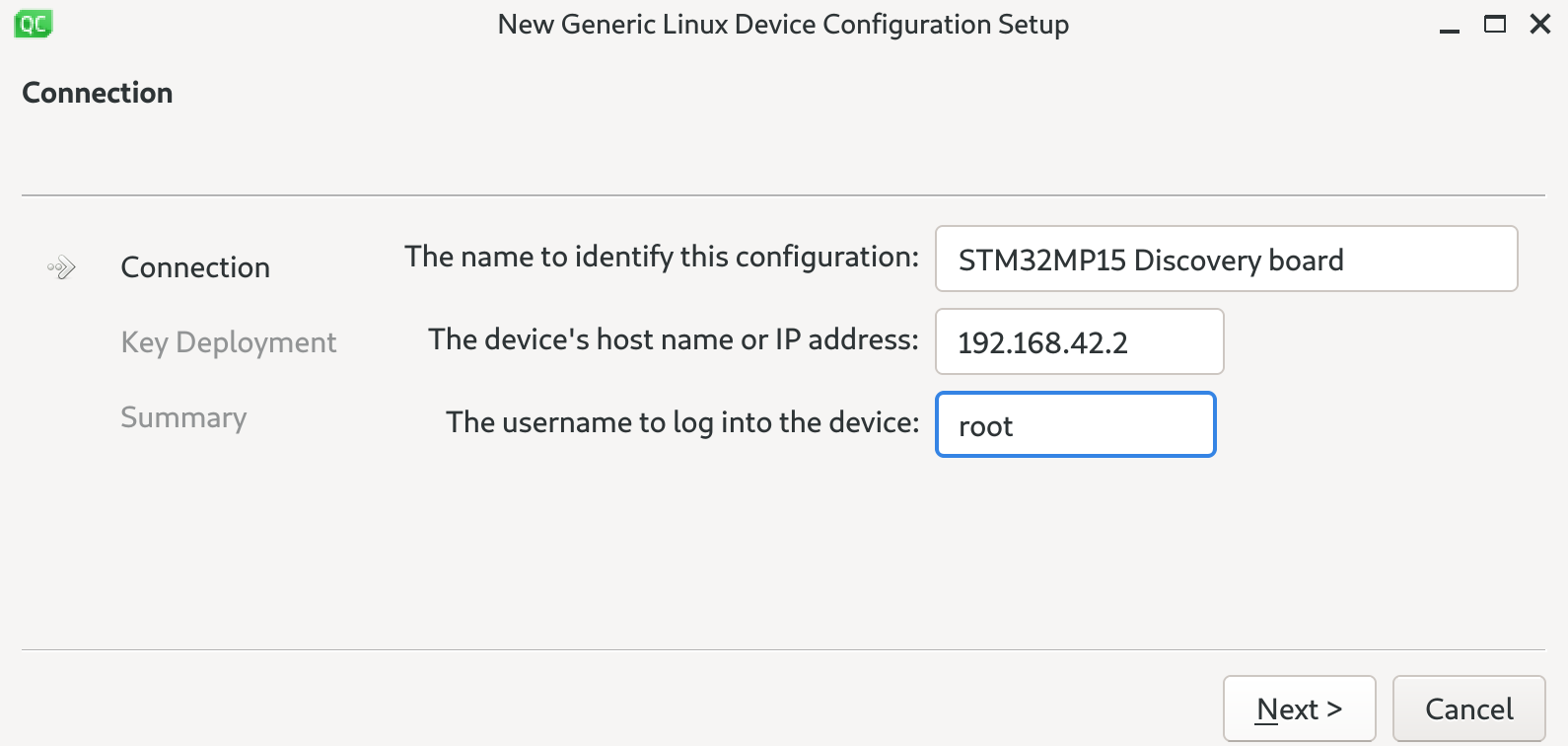
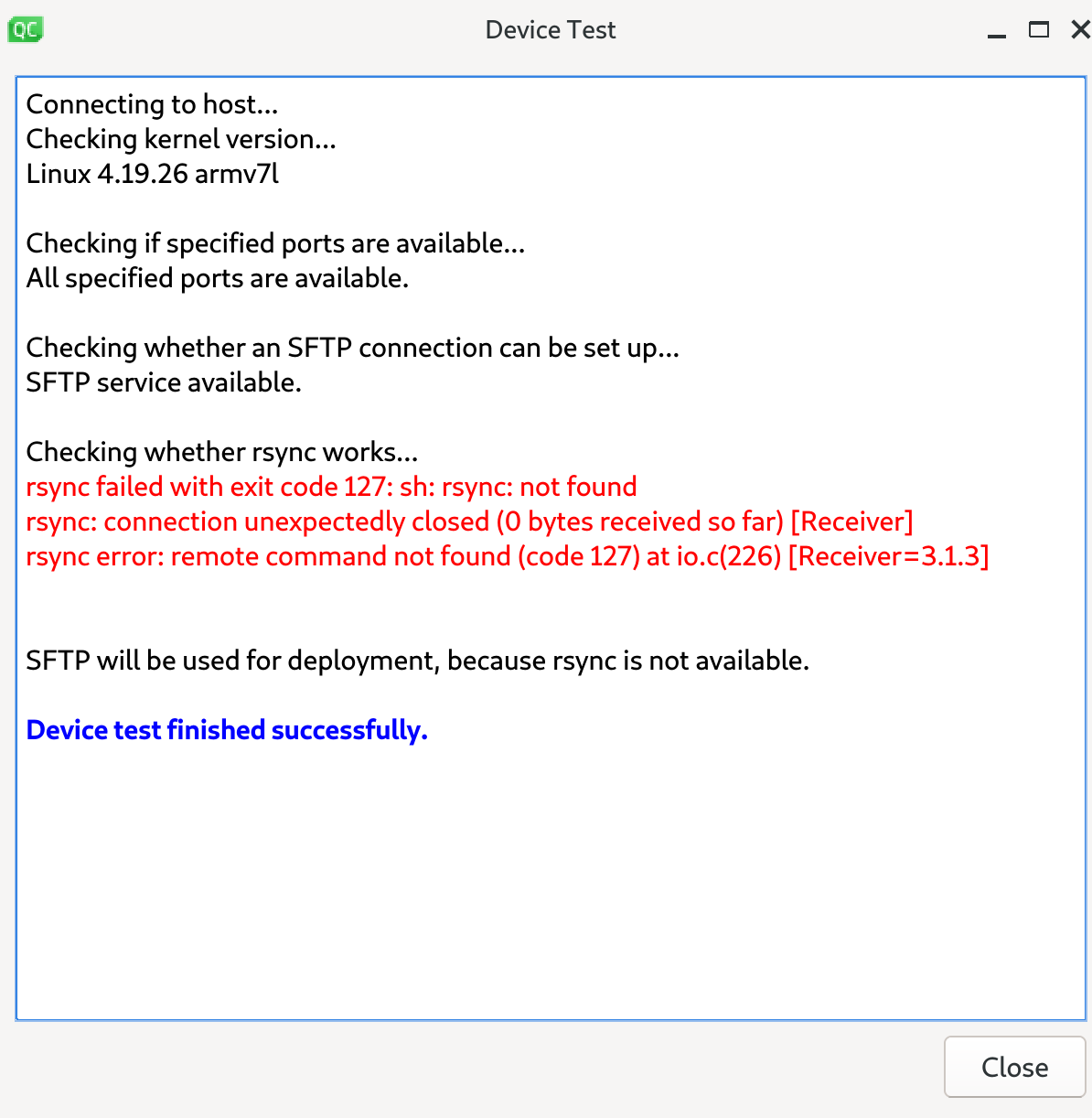

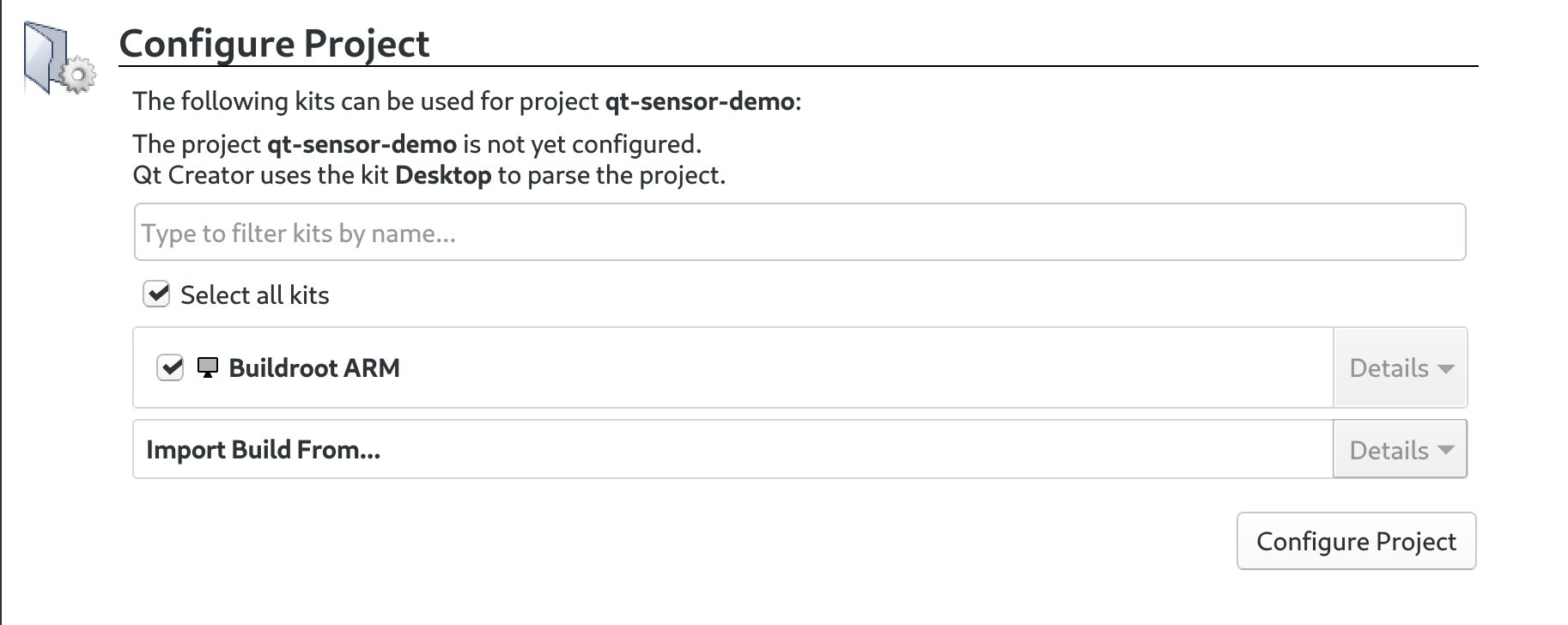
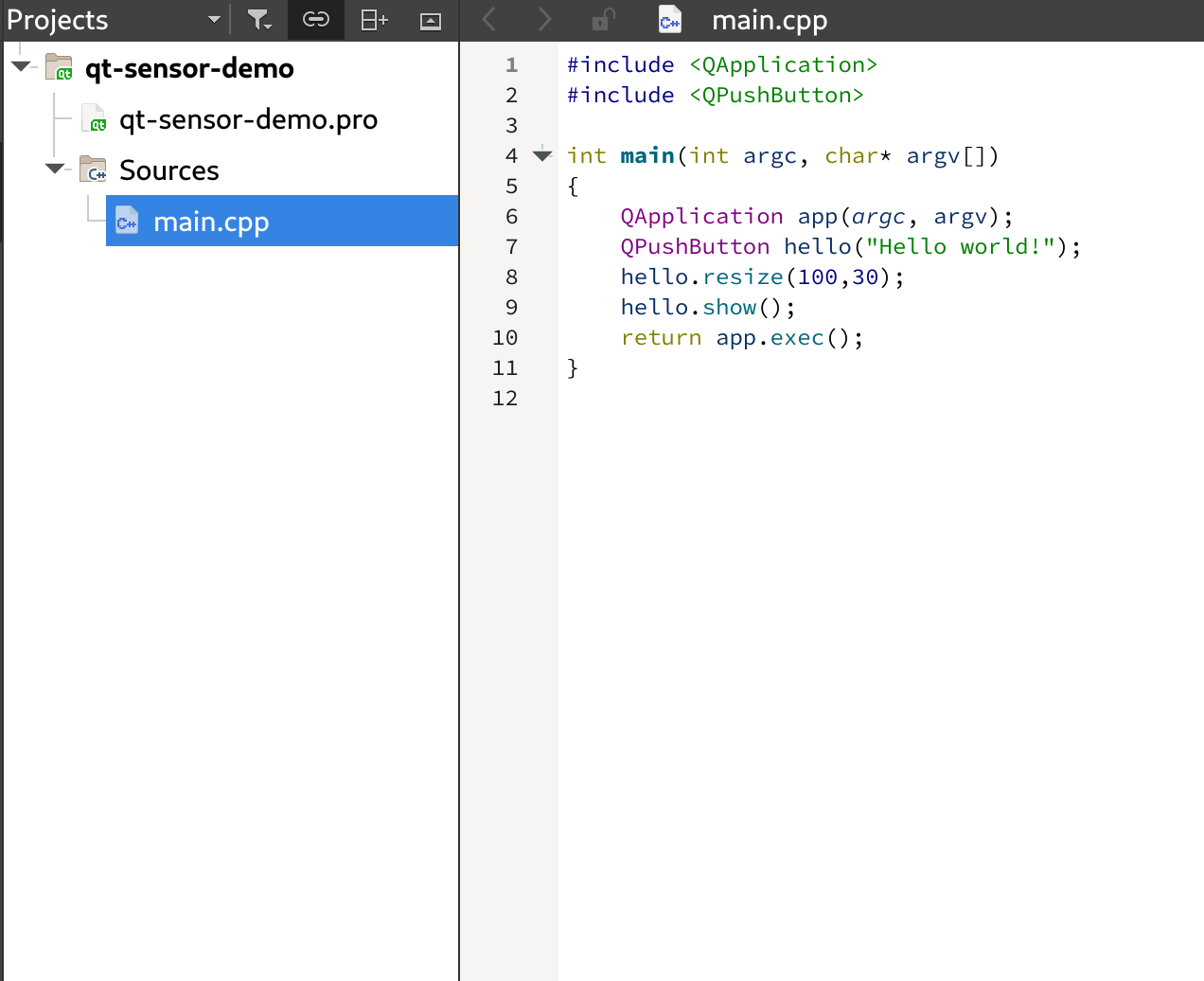
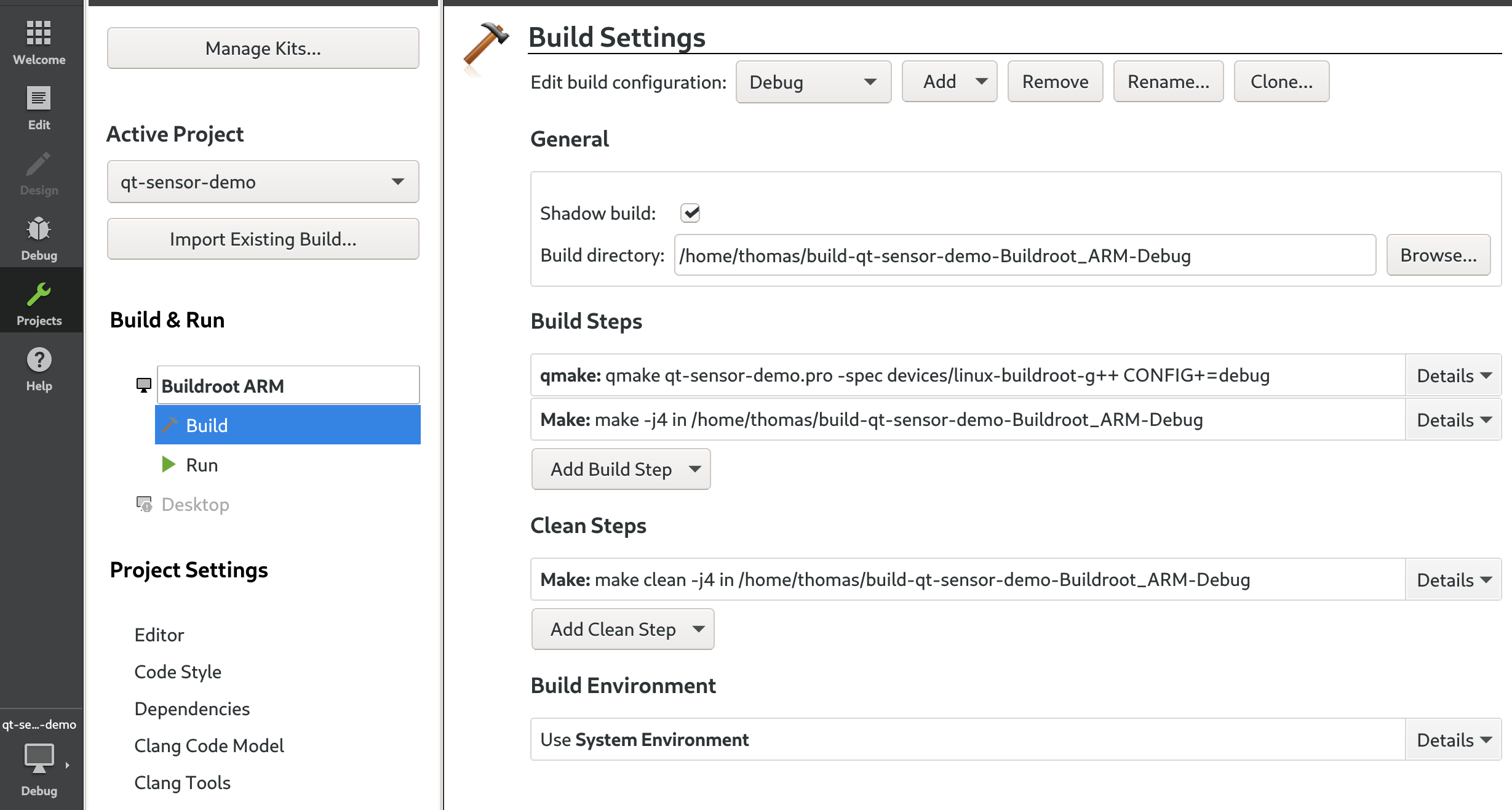
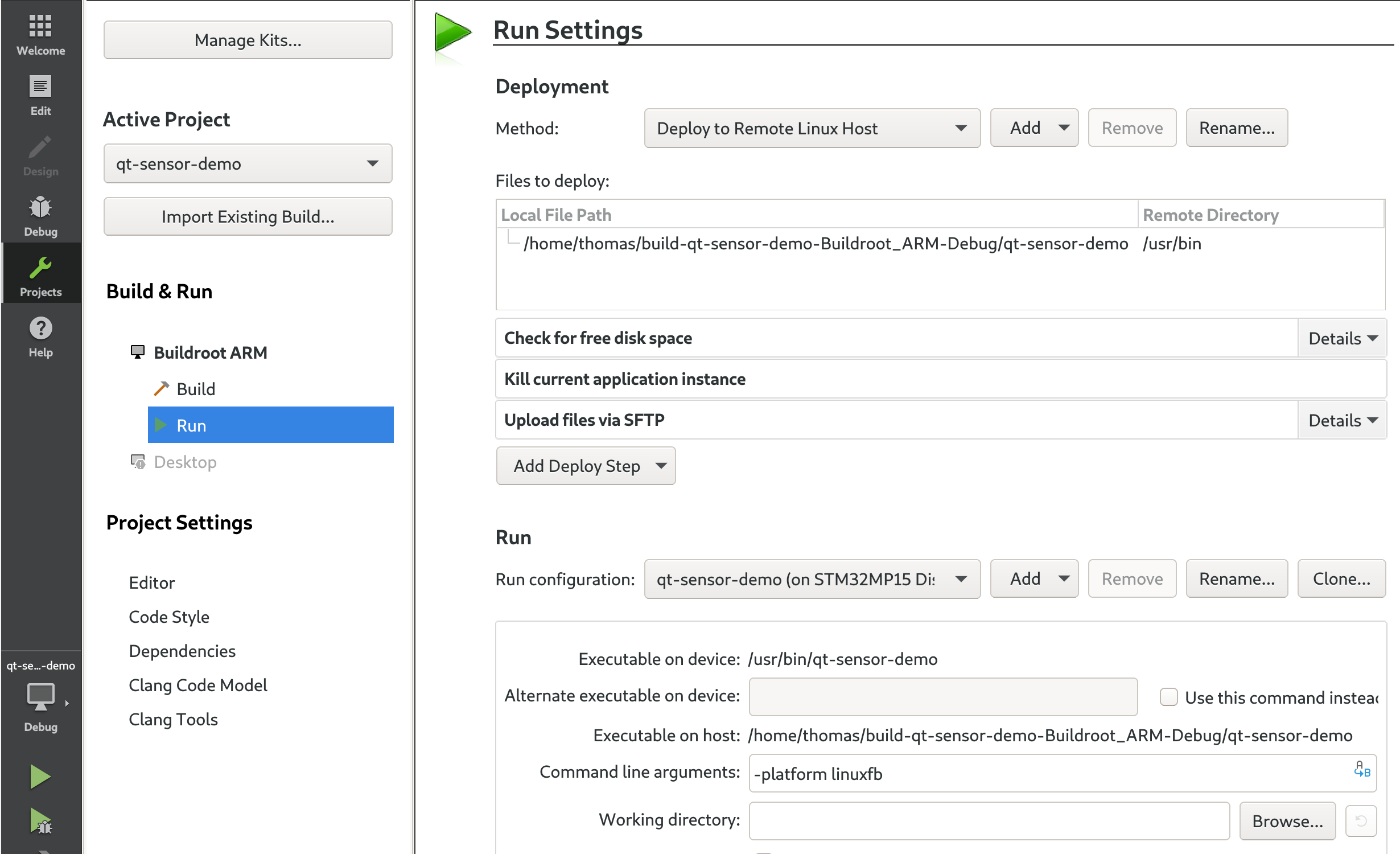
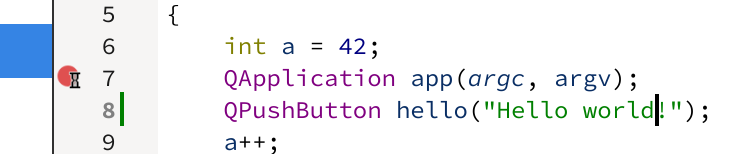

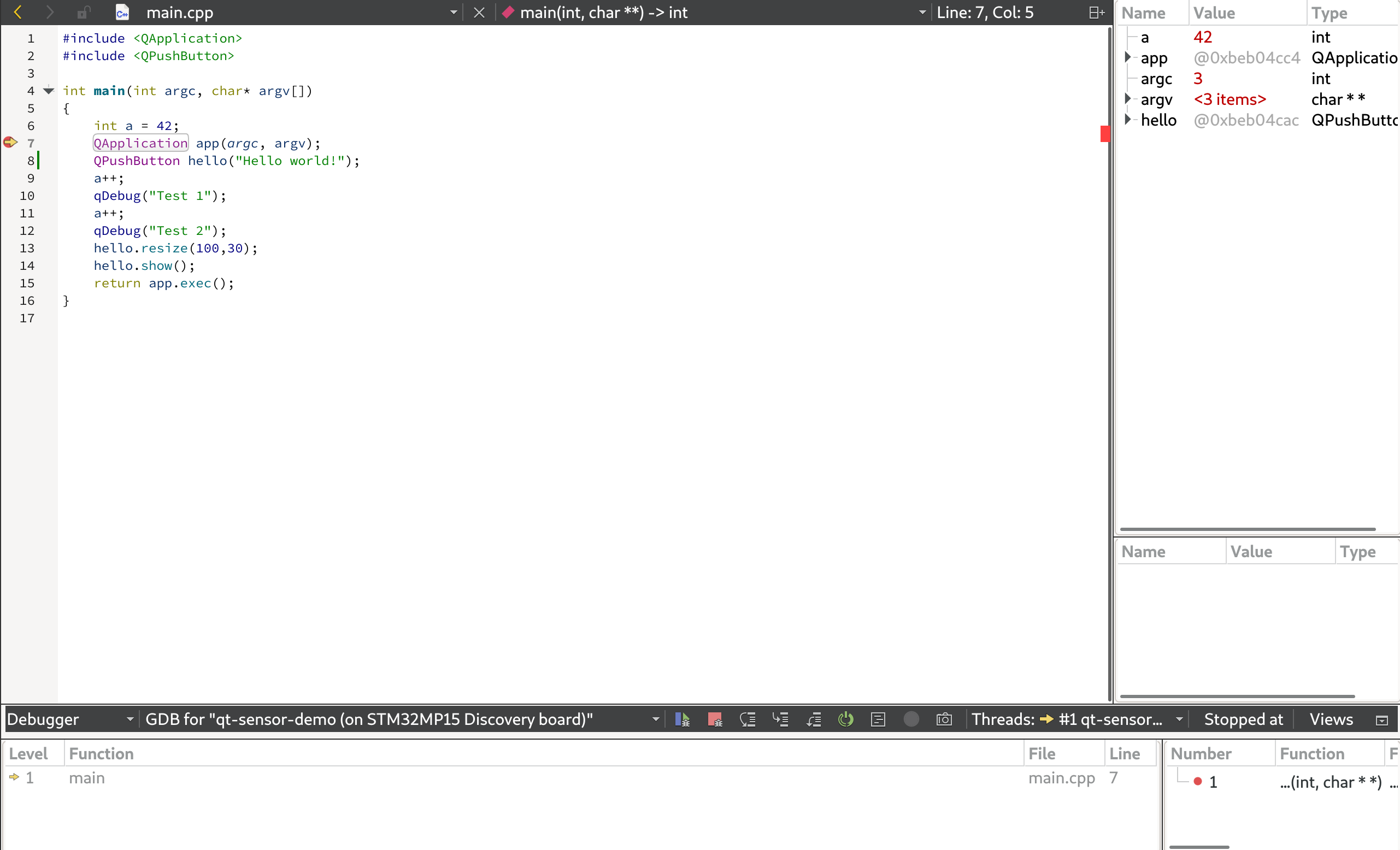
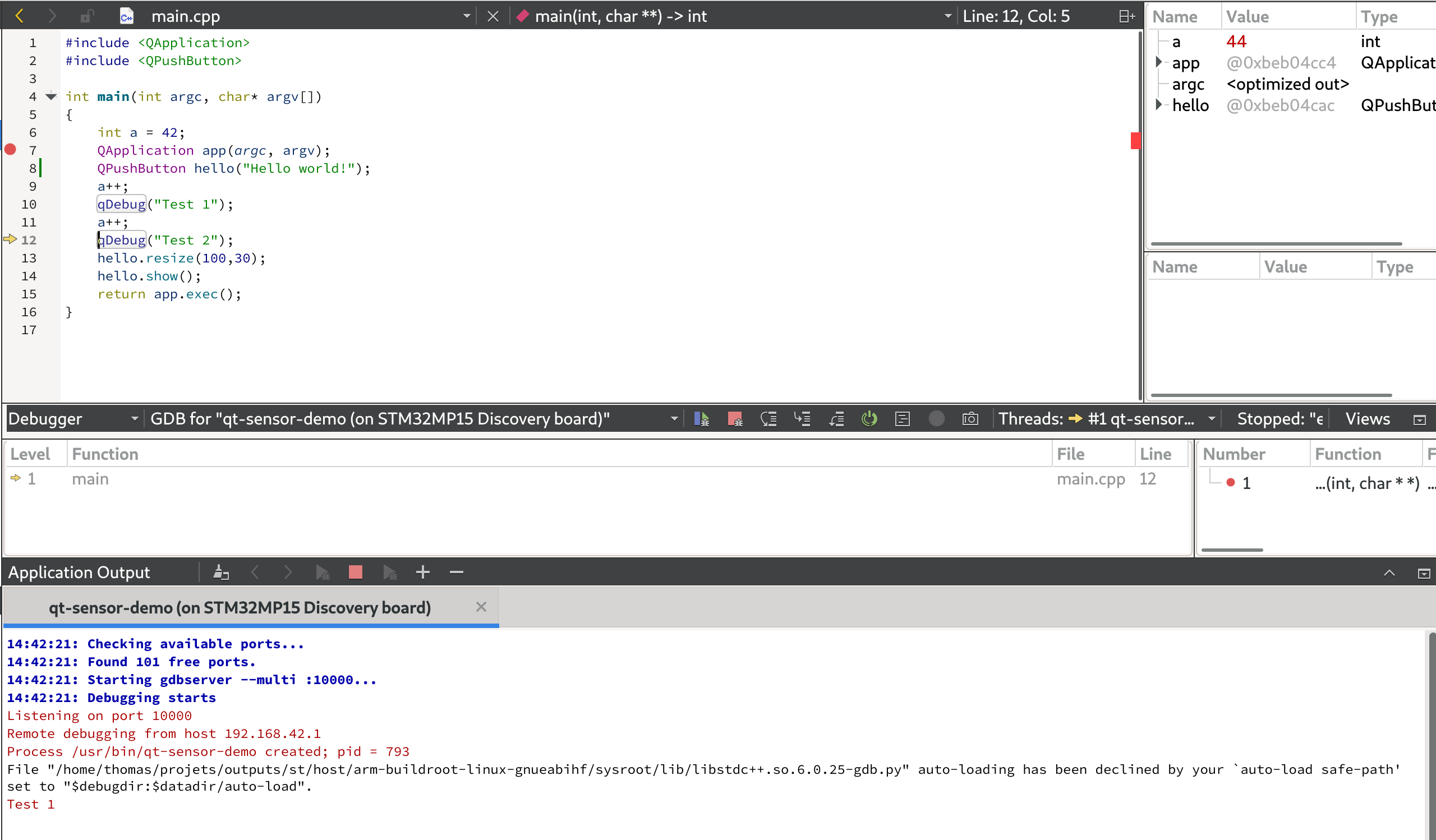


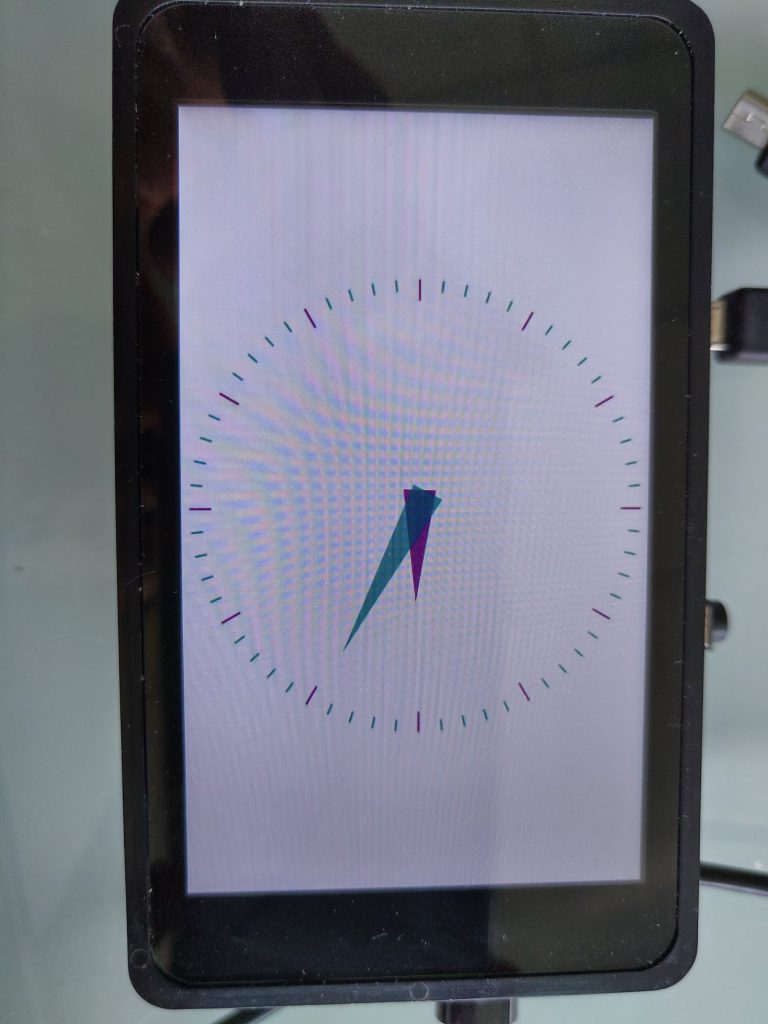

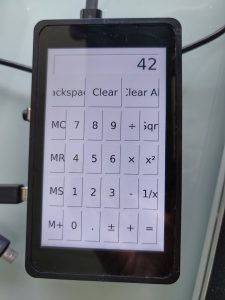
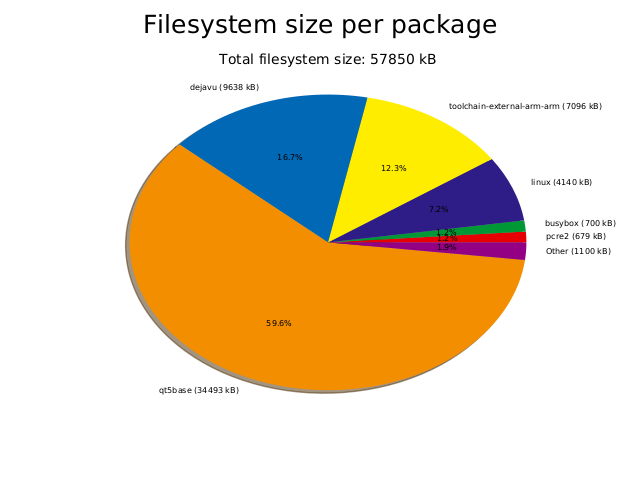

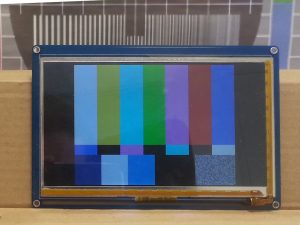 This course has a duration of two days, and is composed of lectures and demonstrations made by the trainer. It does not include practical labs, unlike all our other
This course has a duration of two days, and is composed of lectures and demonstrations made by the trainer. It does not include practical labs, unlike all our other