Continuing our efforts to keep our training materials up-to-date we just refreshed our Yocto project and OpenEmbedded training course to the latest Yocto project release, Krogoth (2.1.1). In addition to adapting our training labs to the Krogoth release, we improved our training materials to cover more aspects and new features.
The most important changes are:
New chapter about devtool, the new utility from the Yocto project to improve the developers’ workflow to integrate a package into the build system or to make patches to existing packages.
Improve the distro layers slides to add configuration samples and give advice on how to use these layers.
Add a part about quilt to easily patch already supported packages.
Explain in depth how file inclusions are handled by BitBake.
Improve the description about tasks by adding slides on how to write them in Python.
Join our Yocto specialist Alexandre Belloni for the first public session of this improved training in Lyon (France) on October 19-21, 2016. We are also available to deliver this training worldwide at your site, contact us!
The 2016 edition of the Kernel Recipes conference will take place from September 28th to 30th in Paris. With talks from kernel developers Jonathan Corbet, Greg Kroah-Hartmann, Daniel Vetter, Laurent Pinchart, Tejun Heo, Steven Rosdedt, Kevin Hilman, Hans Verkuil and many others, the schedule looks definitely very appealing, and indeed the event is now full.
Thomas Petazzoni, Bootlin CTO, will be attending this event. If you’re interested in discussing business or career opportunities with Bootlin, this event will be a great place to meet together.
The next X.org Developer Conference will take place on September 21 to September 23 in Helsinki, Finland. This is a major event for Linux developers working in the graphics/display areas, not only at the X.org level, but also at the kernel level, in Mesa, and other related projects.
Bootlin engineer Maxime Ripard will be attending this conference, with 80+ other engineers from Intel, Google, NVidia, Texas Instruments, AMD, RedHat, etc.
Maxime is the author of the DRM/KMS driver in the upstream Linux kernel for the Allwinner SoCs, which provides display support for numerous Allwinner platforms, especially Nextthing’s CHIP (with parallel LCD support, HDMI support, VGA support and composite video support). Maxime has also worked on making the 3D acceleration work on this platform with a mainline kernel, by adapting the Mali kernel driver. Most recently, Maxime has been involved in Video4Linux development, writing a driver for the camera interface of Allwinner SoCs, and supervising Florent Revest work on the Allwinner VPU that we published a few days ago.
This report gives a nice overview of the evolution of the Linux kernel since 3.18, especially from a contribution point of view: the rate of changes, who is contributing, are there new developers joining, etc.
Bootlin is mentioned in several places in this report. First of all, even though Bootlin is a consulting company, it is shown individually rather than part of the general “consultants” category. As the report explains:
The category “consultants” represents developers who contribute to the kernel as a work-for-hire effort from different companies. Some consultant companies, such as Bootlin and Pengutronix, are shown individually as their contributions are a significant number.
Thanks to being mentioned separately from the “consultants” category, the report also shows that:
Bootlin is the #15 contributing company over the 3.19 to 4.7 development period, in number of commits. Bootlin contributed a total of 1453 commits, corresponding to 1.3% of the total commits
Bootlin is ranked #13 in the list of companies by number of Signed-off-by from developers who are not the author of patches. This happens because 6 of our engineers are maintainers or co-maintainers from various areas in the kernel: they merge patches from contributors, sign-off on them, and send them to another maintainer (either arm-soc maintainers or directly Linus Torvalds, depending on the subsystem).
We’re glad to see Bootlin mentioned in this report, which shows that we are a strong contributor to the official Linux kernel. Thanks to this contribution effort, we have tremendous experience with adding support for new hardware in the kernel, so contact us if you want your hardware supported in the official Linux kernel!
Over the last few years, and most recently with the support for the C.H.I.P platform, Bootlin has been heavily involved in initiating and improving the support in the mainline Linux kernel for the Allwinner ARM processors. As of today, a large number of hardware features of the Allwinner processors, especially the older ones such as the A10 or the A13 used in the CHIP, are usable with the mainline Linux kernel, including complex functionality such as display support and 3D acceleration. However, one feature that was still lacking is proper support for the Video Processing Unit (VPU) that allows to accelerate in hardware the decoding and encoding of popular video formats.
During the past two months, Florent Revest, a 19 year old intern at Bootlin worked on a mainline solution for this Video Processing Unit. His work followed the reverse engineering effort of the Cedrus project, and this topic was also listed as a High Priority Reverse Engineering Project by the FSF.
The internship resulted in a new sunxi-cedrus driver, a Video4Linux memory-to-memory decoder kernel driver and a corresponding VA-API backend, which allows numerous userspace applications to use the decoding capabilities. Both projects have both been published on Github:
Currently, the combination of the kernel driver and VA-API backend supports MPEG2 and MPEG4 decoding only. There is for the moment no support for encoding, and no support for H264, though we believe support for both aspects can be added within the architecture of the existing driver and VA-API backend.
A first RFC patchset of the kernel driver has been sent to the linux-media mailing list, and a complete documentation providing installation information and architecture details has been written on the linux-sunxi’s wiki.
Here is a video of VLC playing a MPEG2 demo video on top of this stack on the Next Thing’s C.H.I.P:
The next Embedded Linux Conference Europe will take place from October 11 to October 13 in Berlin, Germany. As usual, the entire Bootlin engineering team will participate, which means this time 10 participants from Bootlin!
The schedule for the conference has been published recently, and a number of our talk proposals have been accepted, so we will present on the following topics:
Maxime Ripard, co-maintainer of the Allwinner processor support in the Linux kernel, will discuss how he added Support for the Camera Interface on the C.H.I.P platform. This talk will walk through the v4l2 stack, the architecture of a v4l2 driver and the interaction between the SoC driver and its camera’s.
Boris Brezillon, Bootlin engineer and maintainer of the Linux kernel NAND subsystem, will be co-presenting with Richard Weinberger (from sigma star gmbh, and also co-maintainer of the UBI/UBIFS subsystems in the kernel) a talk on Running UBI/UBIFS on MLC NAND. Richard and Boris will present they have been doing over the last year to make UBI/UBIFS and generally the Linux MTD/NAND stack compatible with the constraints of MLC NANDs.
Boris Brezillon (again!) will also give a talk on Modernizing the NAND Framework: The Big Picture, in which he will describe his roadmap for the NAND subsystem, and gather input from the audience as to what needs to be improved in this subsystem.
Gregory Clement, co-maintainer of Linux kernel support for some Marvell SoCs, will present a talk called ARM64 SoC Linux Support Check-List, covering everything you need to know to add support for a new ARM64 System-on-Chip.
Like every year, we’re looking forward to attending this conference, and meeting all the nice folks of the Embedded Linux community!
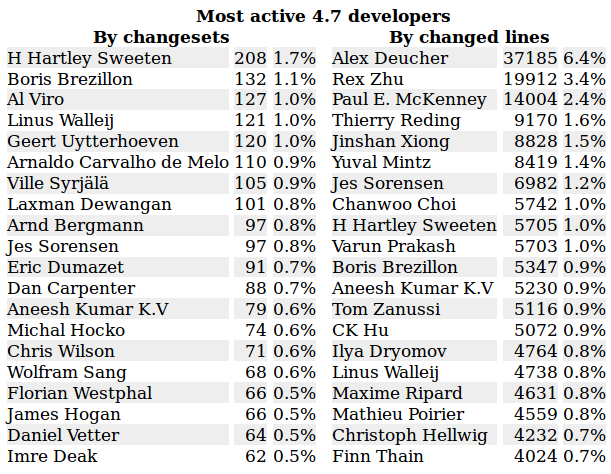
LWN.net has published yesterday an article containing statistics for the 4.7 development cycle. This article is available for LWN.net subscribers only during the coming week, and will then be available for everyone, free of charge.
It turns out that Boris Brezillon, Bootlin engineer, is the second most active contributor to the 4.7 kernel in number of commits! The top three contributors in number of commits are: H Hartley Sweeten (208 commits), Boris Brezillon (132 commits) and Al Viro (127 commits).
In addition to being present in the most active developers by number of commits, Boris Brezillon is also in the #11 most active contributor in terms of changed lines. As we discussed in our previous blog post, most contributions from Boris were targeted at the PWM subsystem on one side (atomic update support) and the NAND subsystem on the other side.
Another Bootlin engineer shows up in the per-developer statistics: Maxime Ripard is the #17 most active contributor by lines changed. Indeed, Maxime contributed a brand new DRM/KMS driver for the Allwinner display controller.
As a company, Bootlin is ranked for the 4.7 kernel as the #12 most active company by number of commits, and #10 by number of changed lines. We are glad to continue being such a contributor to the Linux kernel development, as we have been for the last four years. If you want your hardware to be supported in the official Linux kernel, contact us!
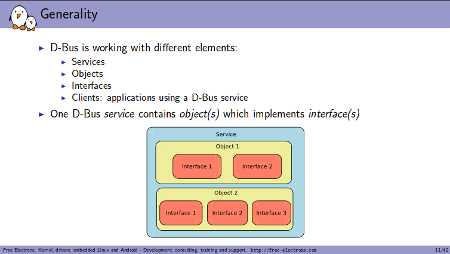
In this talk, Mylène shared her experience working with D-Bus, especially in conjunction with the OFono and Connman projects, to support modem and 3G connections on embedded Linux systems.
We are now publishing the slides of Mylène’s talk, they are available in PDF format.
Boris Brezillon has contributed a core improvement to the PWM subsystem: a mechanism that allows to update the properties of a PWM in an atomic fashion. This is needed when a PWM has been initialized by the bootloader, and the kernel needs to take over without changing the properties of the PWM. See the main patch for more details. What prompted the creation of this patch series is a problem on Rockchip based Chromebook platforms where a PWM is used for a regulator, and the PWM properties need to be preserved across the bootloader to kernel transition. In addition to the changes of the core infrastructure, Boris contributed numerous patches to fix existing PWM users.
In the MTD subsystem, Boris Brezillon continued his cleanup efforts
Use the common Device Tree parsing code provided by nand_scan_ident() in more drivers, rather than driver-specific code.
Move drivers to expose their ECC/OOB layout information using the mtd_ooblayout_ops structure, and use the corresponding helper functions where appropriate. This change will allow a more flexible description of the ECC and OOB layout.
Document the Device Tree binding that should now be used for all NAND controllers / NAND chip, with a clear separation between the NAND controller and the NAND chip. See this commit for more details.
In the RTC subsystem, Mylène Josserand contributed numerous improvements to the rv3029 and m41t80 drivers, including the addition of the support for the RV3049 (the SPI variant of RV3029). See also our previous blog post on the support of Microcrystal’s RTCs/.
On the support of Atmel platforms
Boris Brezillon contributed a number of fixes and improvements to the atmel-hlcdc driver, the DRM/KMS driver for Atmel platforms
On the support of Allwinner platforms
Maxime Ripard contributed a brand new DRM/KMS driver to support the display controller found on several Allwinner platforms, with a specific focus on Allwinner A10. This new driver allows to have proper graphics support in the Nextthing Co. C.H.I.P platform, including composite output and RGB output for LCD panels. To this effect, in addition to the driver itself, numerous clock patches and Device Tree patches were made.
Boris Brezillon contributed a large number of improvements to the NAND controller driver used on Allwinner platforms, including performance improvements.
Quentin Schulz made his first kernel contribution by sending a patch fixing the error handling in a PHY USB driver used by Allwinner platforms.
On the support of Marvell platforms
Grégory Clement made some contributions to the mv_xor driver to make it 64-bits ready, as the same XOR engine is used on Armada 3700, a Cortex-A53 based SoC. Grégory then enabled the use of the XOR engines on this platform by updating the corresponding Device Tree.
Romain Perier did some minor updates related to the Marvell cryptographic engine support. Many more updates will be present in the upcoming 4.8, including significant performance improvements.
Thomas Petazzoni contributed some various fixes (cryptographic engine usage on some Armada 38x boards, HW I/O coherency related fixes).
Thomas also improved the support for Armada 7K and 8K, with the description of more hardware blocks, and updates to drivers.
Here are in details, the different contributions we made to this release:
The Linux kernel is well-known for its ability to run on thousands of different hardware platforms. However, it is obviously impossible for the kernel developers to test their changes on all those platforms to check that no regressions are introduced. To address this problem, the KernelCI.org project was started: it tests the latest versions of the Linux kernel from various branches on a large number of hardware plaforms and provides a centralized interface to browse the results.
KernelCI.org project
From a physical point of view, KernelCI.org relies on labs containing a number of hardware platforms that can be remotely controlled. Those labs are provided by various organizations or individuals. When a commit in one of the Linux kernel Git branches monitored by KernelCI is detected, numerous kernel configurations are built, tests are sent to all labs and results are collected on the KernelCI.org website. This allows kernel developers and maintainers to detect and fix bugs and regressions before they reach users. As of May, 10th 2016, KernelCI stats show a pool of 185 different boards and around 1900 daily boots.
Bootlin is a significant contributor to the Linux kernel, especially in the area of ARM hardware platform support. Several of our engineers are maintainers or co-maintainers of ARM platforms (Grégory Clement for Marvell EBU, Maxime Ripard for Allwinner, Alexandre Belloni for Atmel and Antoine Ténart for Annapurna Labs). Therefore, we have a specific interest in participating to an initiative like KernelCI, to make sure that the platforms that we maintain continue to work well, and a number of the platforms we care about were not tested by the KernelCI project.
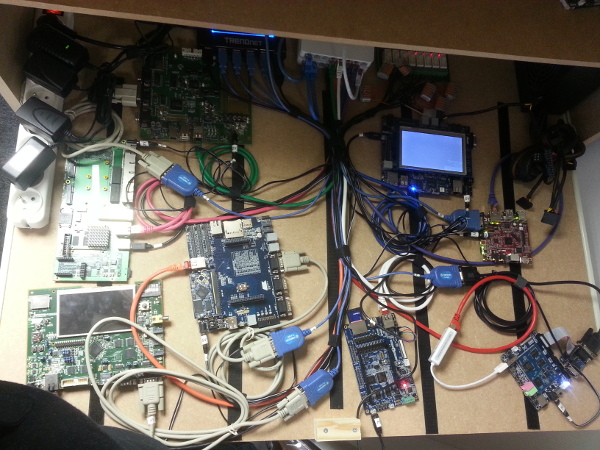
Over the last few months, we have been building our boards lab in our offices, and we have joined the KernelCI project since April 25th. Our lab currently consists of 15 boards:
Atmel SAMA5D2 Xplained
Atmel SAMA5D3 Xplained
Atmel AT91SAM9X25EK
Atmel AT91SAM9X35EK
Atmel AT91SAMA5D36EK
Atmel AT91SAM9M10G45EK
Atmel AT91SAM9261EK
BeagleBone Black
Beagleboard-xM
Marvell Armada XP based Plathome Openblocks AX3
Marvell Armada 38x Solidrun ClearFog,
Marvell Armada 38x DB-88F6820-GP
Allwinner A13 Nextthing Co. C.H.I.P
Allwinner A33 Sinlinx SinA33
Freescale i.MX6 Boundary Devices Nitrogen6x
We will very soon be adding 4 more boards:
Atmel SAMA5D4 Xplained
Atmel SAMA5D34EK
Marvell Armada 7K 7040-DB (ARM64)
Marvell Armada 39x DB
Three of the boards we have were already tested thanks to other KernelCI labs, but the other sixteen boards were not tested at all. In total, we plan to have about 50 boards in our lab, mainly for the ARM platforms that we maintain in the official Linux kernel. The results of all boots we performed are visible on the KernelCI site. We are proud to be part of this unique effort to perform automated testing and validation of the Linux kernel!
In the coming weeks, we will publish additional articles to present the software and physical architecture of our lab and the program we developed to remotely control boards that are in our lab, so stay tuned!
 The 2016 edition of the
The 2016 edition of the  Lask week, the
Lask week, the 
 Linux 4.7 has been
Linux 4.7 has been