 As part of a recent project involving advanced sound cards, Bootlin engineer Miquèl Raynal had to find a way to automate audio hardware loopback testing. In hand, he had a PCI audio device with many external interfaces, each of them featuring an XLR connector. The connectors were wired to analog and digital inputs and outputs. In a regular sound-engineers based company, playing back heavy music through amplifiers and loud speakers is probably the norm, but in order to prevent his colleagues ears from bleeding during his ALSA/DMA debug sessions, he decided to anticipate all human issues and save himself from any whining coming from his nearby colleagues.
As part of a recent project involving advanced sound cards, Bootlin engineer Miquèl Raynal had to find a way to automate audio hardware loopback testing. In hand, he had a PCI audio device with many external interfaces, each of them featuring an XLR connector. The connectors were wired to analog and digital inputs and outputs. In a regular sound-engineers based company, playing back heavy music through amplifiers and loud speakers is probably the norm, but in order to prevent his colleagues ears from bleeding during his ALSA/DMA debug sessions, he decided to anticipate all human issues and save himself from any whining coming from his nearby colleagues.
Category: Technical
A Tegra20 parallel camera capture driver heading for the mainline Linux kernel
Over the past year Bootlin engineer Luca Ceresoli has been working to add a device driver for the parallel camera interface of the NVIDIA Tegra20 System on Chip into the mainline Linux kernel.
The main challenge faced during this work has been the lack of documentation. So the work has been based on a driver from an NVIDIA BSP, forked from a 3.1 kernel (which has been released back in 2011!). The old driver code base needed a huge rework, being largely rewritten, and not only because of the changes in 10+ years of kernel development.
The mainline kernel already has a driver for CSI capture on Tegra210, albeit in staging. The two hardware components have some common functionality, thus to avoid code duplication Luca augmented the existing driver and generalized the code implementing common areas instead of adding a new driver. This posed the additional challenge of not breaking functionality on another SoC, based on a different architecture and using a different video bus… all without access to such other hardware!
Luca just resent version 4 of the patch series implementing this.
If you have a device using Tegra20 parallel capture or Tegra210 CSI video capture, this is a great opportunity to test the code and report your findings! And in case you don’t have the hardware, you’d still be very welcome in reviewing the patches.
Finally, if you have access to the Tegra20 documentation, we’d love to know: the driver could possibly be improved with good knowledge of the hardware.
Fixing reboot in ZynqMP PMU Firmware
Thanks to community contributions, our engineer Luca Ceresoli has recently published a fix to the zynqmp-pmufw-builder repository that allows building a fully working PMU Firmware binary. Rebooting had previously been broken for a long time.
Boot time: choose your kernel loading address carefully
When the compressed and uncompressed kernel images overlap
At least on ARM32, there seems to be many working addresses where the compressed kernel can be loaded in RAM. For example, one can load the compressed kernel at offset 0x1000000 (16 MB) from the start of RAM, and the Device Tree Blog (DTB) at offset 0x2000000 (32 MB). Whatever this loading address, the kernel is then decompressed at offset 0x8000 from the start of RAM, as explained this the famous How the ARM32 Linux kernel decompresses article from Linus Walleij.
There is a potential issue with the loading address of the compressed kernel, as explained in the article too. If the compressed kernel is loaded too close to the beginning of RAM, where the kernel must be decompressed, there will be an overlap between the two. The decompressed kernel will overwrite the compressed one, potentially breaking the decompression process.
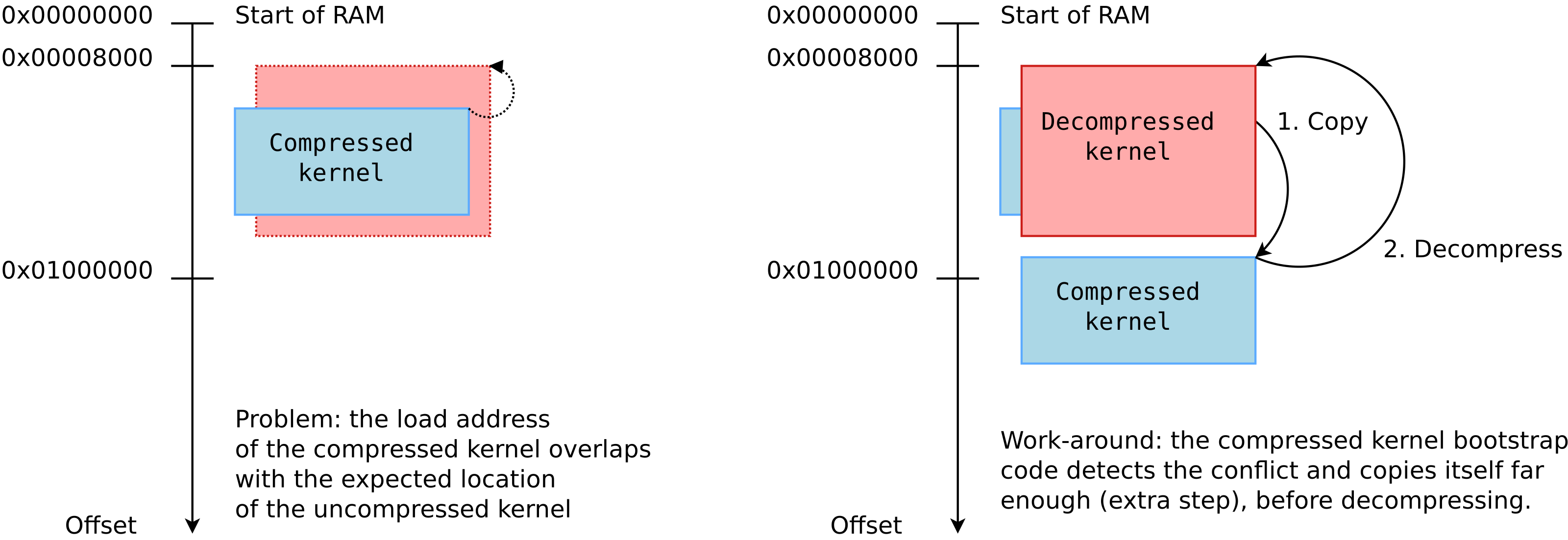
As you see in the above diagram, when this happens, the bootstrap code in the compressed kernel will first copy the compressed image to a location that’s far enough to guarantee that the decompressed kernel won’t overlap it. However, this extra step in the boot process has a cost.
Measuring boot time impact
In the context of updating our materials for our upcoming Embedded Linux Boot Time Optimization course in June, we measured this additional time on the STM32MP157A-DK1 Discovery Kit from STMicroelectronics, with a dual-core ARM Cortex-A7 CPU running at 650 MHz.
Initially, in our Embedded Linux System Development course, we were booting the DK1 board as follows:
ext4load mmc 0:4 0xc0000000 zImage; ext4load mmc 0:4 0xc4000000 dtb; bootz 0xc0000000 - 0xc4000000
0xc0000000 is exactly the beginning of RAM! We are therefore in the overlap situation.
We used grabserial from Tim Bird to measure the time between Starting kernel in U-Boot and when the compressed kernel starts executing (Booting Linux on physical CPU 0x0):
... [4.451996 0.000124] Starting kernel ... [0.001838 0.001838] [2.439980 2.438142] [ 0.000000] Booting Linux on physical CPU 0x0 ...
On a series of 5 identical tests, we obtained an average time of 2,440 ms, with a standard deviation of 0.4 ms.
Then, we measured the optimum case, in which the compressed kernel is loaded far enough from the beginning of RAM so that no overlap is possible:
Here we chose to load the kernel at 0xc2000000:
ext4load mmc 0:4 0xc2000000 zImage; ext4load mmc 0:4 0xc4000000 dtb; bootz 0xc2000000 - 0xc4000000
On a series of 5 identical tests, we obtained an average time of 2,333 ms, with a standard deviation of 0.7 ms.
The new average is 107 ms smaller, which you are likely to consider as a worthy reduction, if you have experience with boot time reduction projects.
What to remember
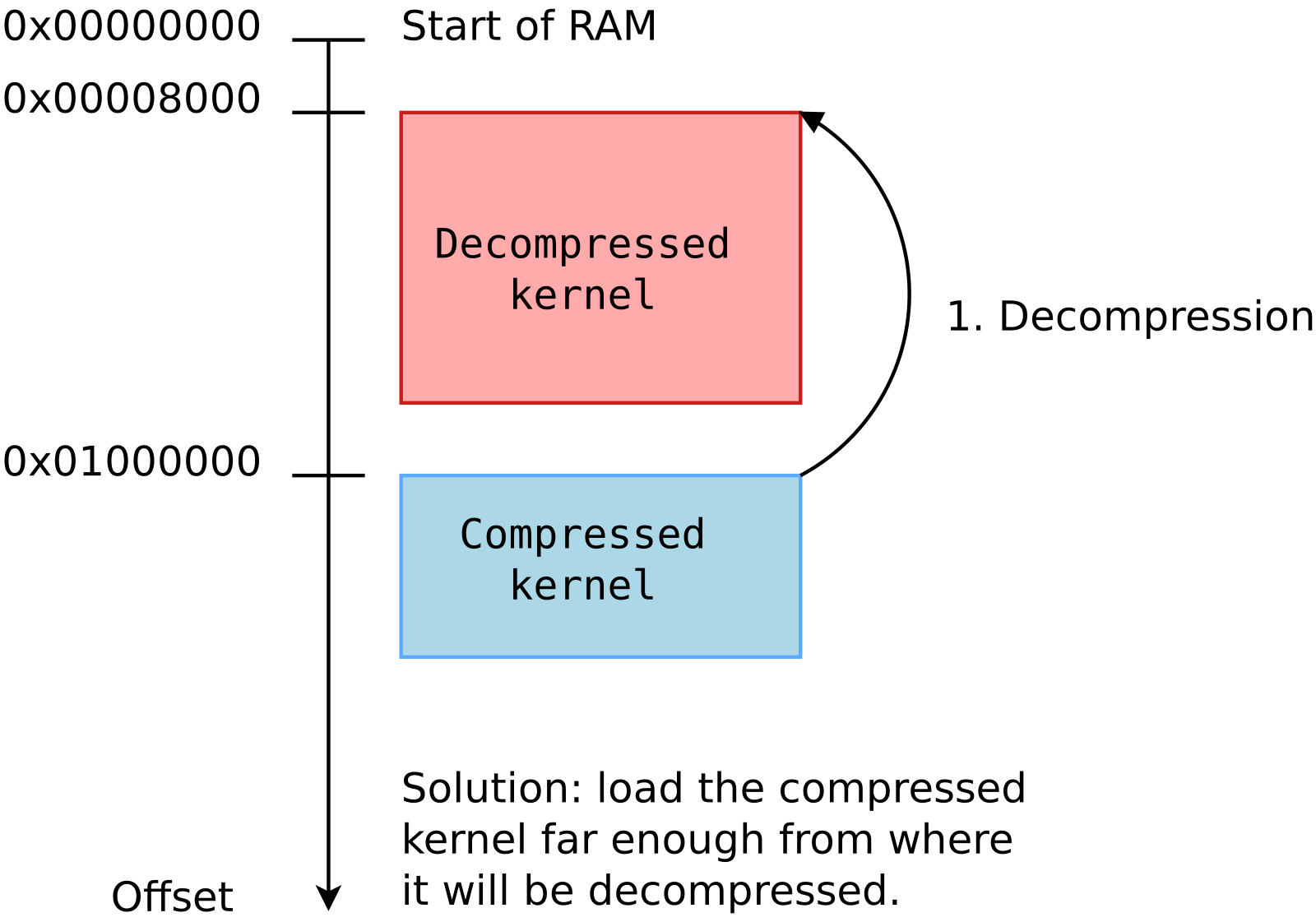
In your embedded projects, if you are using a compressed kernel, make sure it is loaded far enough from the beginning of RAM, leaving enough space for the decompressed kernel to fit in between. Otherwise, your system will still be able to boot, but depending on the speed of your CPU and storage, it will be slower, from a few tens to a few hundreds of milliseconds.
We checked the How to optimize the boot time page on the STM32 wiki, and it recommends optimum loading addresses: 0xc2000000 for the kernel and 0xc4000000 for the device tree. This way, the upper limit for the decompressed kernel is 32 MB, which is more than enough.
If you are directly using an uncompressed kernel, which is more rare, you should also make sure that it is loaded at an optimum location, so that there is no need to move it before starting it.
Linux 6.2 released, Bootlin contributions inside
Linux 6.2 was released a few days ago, and as usual we point our readers to the LWN coverage of the merge window (part 1 and part 2), or the traditional KernelNewbies page or alternatively the embedded focused CNX Software coverage.
At Bootlin, we contributed a total of 122 patches to this release, making Bootlin the 21st contributing company by number of commits according to statistics. Also Bootlin engineer Paul Kocialkowski appears in the top developers by changed lines in the Linux 6.2 statistics.
Continue reading “Linux 6.2 released, Bootlin contributions inside”
Test a Linux kernel USB Device Controller driver with testusb
At Bootlin, we recently developed from scratch a new Linux driver for the USB Device Controller found in the Renesas RZ/N1 processor. This driver is already accepted upstream, is currently visible in linux-next and should hopefully be part of the upcoming Linux 6.3 release.
As part of developing this driver, we of course had to… test it! To test a USB Device Controller driver, the obvious idea that comes to mind is to use the available USB gadget drivers in the Linux kernel, to expose a USB mass-storage device, a USB network device, etc. However, these existing USB gadget drivers are not necessarily the best option for this kind of testing: they perform some more or less complex transfers and it can be difficult to find the root cause of an error using these gadget drivers.
Fortunately, a tool exists precisely to perform testing of USB transfers: this tool is called testusb, and it can be found directly in the Linux kernel source code in tools/usb/testusb.c. The tool is quite old and not very well known, but it proved to be very useful for our testing, so in this blog post we are sharing some details on how to use it.
Continue reading “Test a Linux kernel USB Device Controller driver with testusb”
Embedded Linux Conference Europe 2022: a selection of talks by Bootlin engineers
 Almost the entire engineering team of Bootlin attended the Embedded Linux Conference Europe 2022 in Dublin mid-september, an important event for Bootlin as it helps everyone in the team stay up to date with the latest developments in the Embedded Linux ecosystem, and connect with members of the community.
Almost the entire engineering team of Bootlin attended the Embedded Linux Conference Europe 2022 in Dublin mid-september, an important event for Bootlin as it helps everyone in the team stay up to date with the latest developments in the Embedded Linux ecosystem, and connect with members of the community.
All the slides and videos are available at https://elinux.org/ELC_Europe_2022_Presentations, which is one of the great things about the Embedded Linux Conference.
After such conferences, we have a tradition at Bootlin: share with our readers a selection of talks that we found interesting. Several members of our engineering team were asked to select one of their favorite talks, and highlight it with a short summary.
Continue reading “Embedded Linux Conference Europe 2022: a selection of talks by Bootlin engineers”
Welcome to Alexis Lothoré
 Bootlin is really happy to welcome another engineer in its team: Alexis Lothoré, who joined us on January 3, 2023.
Bootlin is really happy to welcome another engineer in its team: Alexis Lothoré, who joined us on January 3, 2023.
Alexis graduated in 2016 from INSA Toulouse and built his experience on embedded systems and embedded Linux while working for Smile and then Somfy Protect. In addition to his experience on embedded Linux, Alexis has experience on micro-controller based development, with real-time operating systems such as FreeRTOS, and also has a wide knowledge around connected systems: protocols, security, robustness, evolutivity.
Alexis is now joining our team located in Toulouse, France, where he will work at our office with Hervé Codina, Paul Kocialkowski, Köry Maincent, Thomas Perrot, Miquèl Raynal, Jérémie Dautheribes and Thomas Petazzoni.
For more details, see Alexis page on Bootlin.com and his LinkedIn profile.
Debugging, tracing and profiling training course materials published
 Back in November 2022, we announced the availability of a new training course titled Linux debugging, profiling, tracing and performance analysis.
Back in November 2022, we announced the availability of a new training course titled Linux debugging, profiling, tracing and performance analysis.
At the time, this training course was still being prepared, but since then Bootlin engineer Clément Léger finished the preparation and successfully delivered the training course to a group of participants.
We are now happy to announce the availability of the training materials corresponding to this course, continuing Bootlin’s long commitment of free availability of all its training materials. On the training page, you can access:
- the slides
- the lab instructions
- the lab data
We have a public on-line session of this course planned on January 30-February 2 which is full, but we have a few seats left for the next session on March 20-23, registration available on-line.
We will of course schedule other public on-line sessions of this course this year. If you have a sufficiently large group of participants to train, we also offer private on-line and private on-site sessions.
The icon used in this blog post comes from flaticon.com.
Updated Buildroot support for STM32MP1 platforms, ST BSP v4.1
Back in December 2021, we announced the buildroot-external-st project, which is an extension of the Buildroot build system with ready-to-use configurations for the STMicroelectronics STM32MP1 platforms. Later on, in July 2022, we updated it to the lastest Buildroot LTS 2022.02 and version 4.0 of ST BSP version.
More specifically, this project is a BR2_EXTERNAL repository for Buildroot, with a number of defconfigs that allow to quickly build embedded Linux systems for the STM32MP1 Discovery Kit platforms. It’s a great way to get started with Buildroot on those platforms.
Today, we are happy to announce an updated version of this project, published under the branch st/2022.02.7 at https://github.com/bootlin/buildroot-external-st. This new version brings the following changes:
Continue reading “Updated Buildroot support for STM32MP1 platforms, ST BSP v4.1”