Linux 6.0 has been released two weeks ago, and Linux 6.1-rc1 is already out of the door, but we didn’t get the chance to look at the contributions made by Bootlin to the Linux 6.0 release. Before we do that, let’s provide our usual must-read articles on Linux 6.0: the Linux 6.0 merge window part 1 and Linux 6.0 merge window part 2 LWN.net articles and the KernelNewbies.org article.
On Bootlin side, our significant contributions to this release have been:
Clément Léger contributed a new driver for the Ethernet switch found in the Renesas RZ/N1 processor, as well as a PCS driver for the MII converter of the same processor. Obviously, this came with the related Device Tree bindings and Device Tree changes, but also with a few small changes in the DSA subsystem.
Hervé Codina enabled support for the PCIe controller found in the same Renesas RZ/N1 processor, which in fact does not allow to use PCIe devices, but USB devices: this PCIe controller is only used to connect to an internal USB controller in the chip, which therefore allows to use USB devices.
Köry Maincent extended the existing mpc4922 DAC IIO driver to also support the mpc4921 variant, which has only one output channel instead of two.
Luca Ceresoli contributed several improvements to the I2C subsystem documentation.
Paul Kocialkowski contributed two new V4L drivers for the MIPI CSI-2 camera interfaces available in the Allwinner A31 family of processors (sun6i) and the Allwinner A83T family of processors (sun8i).
Here is the full details of our contributions, commit by commit:
This year, the ELC will take place in Seatle but will be organised as a hybrid virtual/physical event due to the pandemic. As usual the ELC will have a really interesting schedule with 46 talks covering a wide range of topics: build system, kernel graphics, boot process, security, etc.
See below the details of Bootlin talks that will be presented as virtual talks.
Advanced Camera Support on Allwinner SoCs with Mainline Linux – Paul Kocialkowski, Bootlin
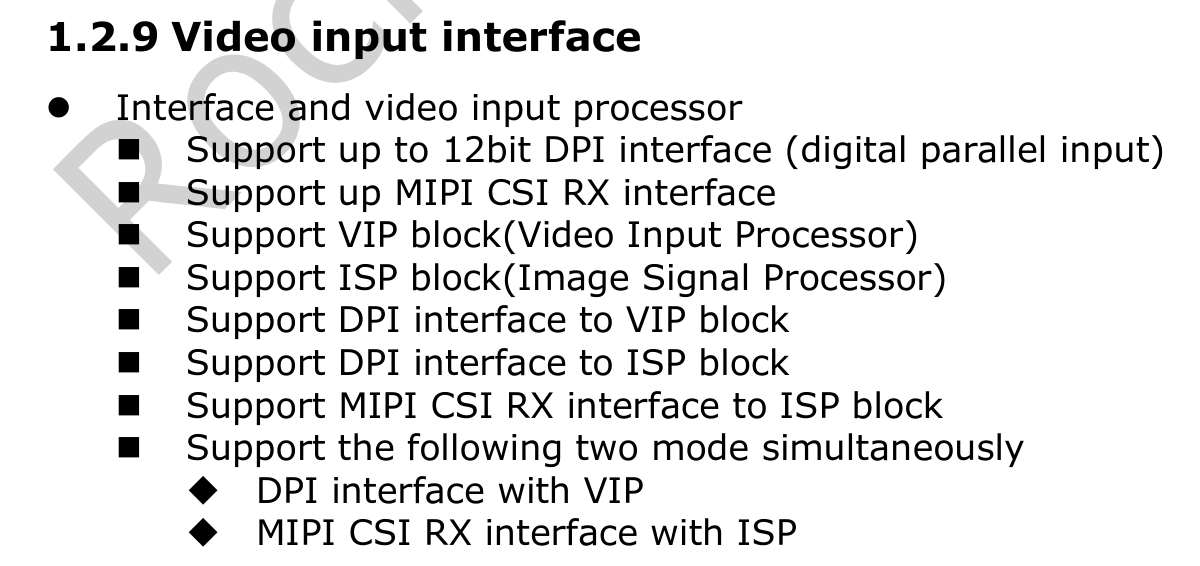
Capturing pixels with a camera involves a number of steps, from the ADC reading the photosites in the image sensor to the final pixel values that are ready for encode/display, with various processing and transmission taking place along the way. While simple cases put most of the heavy lifting on the image sensor’s side (through its embedded processor) and use a simple parallel bus for transmission, advanced cases require more work to be done outside of the sensor. In addition, modern high-speed transmission buses also bring-in more complexity. This talk will present how support for such an advanced use case was integrated into the mainline Linux kernel, using the Media and V4L2 APIs. It involves supporting a sensor using the raw Bayer RGB format, transmission over the MIPI CSI-2 bus as well as support for the Image Signal Processor (ISP) found on Allwinner platforms. A specific focus will be set on this ISP, with details about the features it implements as well as the internal and userspace APIs that are used to support it. The integration between all of the involved components will also be highlighted.
Embedded Linux Nuggets found in Buildroot Package Eldorado
To this date, Buildroot supports more than 2,500 packages, selected for the ability to run them on embedded Linux systems. We’ve gone exploring this Eldorado, and came back with multiple nuggets of all shapes and colors. Join this playful presentation and as if you were still a new comer to the embedded Linux community, discover lesser known tools and resources that can add to the functionality of your systems or make your life as a developer easier and more fun. Whenever possible, each resource will be shown through a quick demonstration or video capture. During this talk, I’ll also open an Etherpad for all participants to share their favorite solutions with the rest of the audience, especially the ones that deserve to be better known, and could be worth supporting in Buildroot too. We will close the session by an open review and discussion based on the nuggets shared by the audience.
I3C is the new bus specification by the MIPI Alliance. While being compatible with I2C devices, this bus brings a colorful set of new features such as dynamic address assignment, in-band interrupts, hot-join, master handover and many others. It was improved once again recently with the 1.1 version of the specification which brought timer based sampling synchronization and targeted reset. All this make the I3C bus a good candidate for a number of new situations compared to its I2C cousin. It is then more and more being included in new hardware designs. With this talk we would like to propose a reminder of the various components and concepts of this relatively new bus. We will then detail how it is implemented in the Linux kernel with a short guided tour in the I3C core. Since the previous talk on I3C in 2018 by Boris Brezillon, I3C has now become a reality and starts to become available in real hardware designs. This talk will recap the basics of I3C as well as add details of the 1.1 specification and improvements in the Linux support.
OP-TEE is an open-source Trusted Execution Environment designed to be executed in a secure context as a companion to a non secure Linux system. But what happens to the peripherals control since OP-TEE can forbid the non-secure OS to access them ? When running with a TEE, Linux isn’t in charge anymore of some critical peripherals and relies on the TEE to access and configure them. There are multiple protocols and methods to access these peripherals that are supported by Linux (SCMI, PSCI, SMC). Supporting them for a SoC requires understanding the various interactions between the systems and how to modify them to fit that new control scheme. Additionally, the configuration must be passed from OP-TEE to Linux to allow a seamless integration. This talk will cover the boot process to start a secure system and the modifications needed to run Linux when OP-TEE is in charge of some peripherals. The work that has been done for a specific SoC will be described to have a tangible real-world use-case.
Over the past years, we have been more and more involved in projects that have significant multimedia requirements. As part of this trend, 2020 has lead us to work on a number of contributions to the Video4Linux subsystem of the Linux kernel, with new drivers for camera interfaces, camera sensors, video decoders, and even HW-accelerated video encoding. In this blog post, we propose to summarize our contributions and their status on the following topics:
Rockchip PX30, RK1808, RK3128 and RK3288 camera interface driver
Allwinner A31, V3s/V3/S3 and A83T MIPI CSI-2 support for the camera interface driver
Omnivision OV8865 camera sensor driver
Omnivision OV5648 camera sensor driver
TW9900 PAL/NTSC video decoder driver
Rockchip HW-accelerated H264 video encoding
Rockchip camera interface
The Rockchip ARM processors are known to have very good support in the upstream Linux kernel. However, one area where the support was lacking is in the support of the camera interface used by those SoCs. And it turns out that Bootlin engineer Maxime Chevallier has worked precisely on this topic throughout 2020: the development and upstreaming of the rkvip driver, a Video4Linux driver for the Rockchip camera interface. While the work was done and tested on a Rockchip PX30 platform, the same camera interface is used on RK1808, RK3128 and RK3288.
Several iterations of the driver have been posted on the linux-media mailing list, with the latest iteration, version 5, posted on December 29, 2020:
We’re hoping to get this driver merged soon, as we have now addressed the feedback that was received through the 5 iterations the patch series as gone through. It should be noted that for now it only supports the parallel BT656 interface as this is what we needed for our current project, we are definitely able to extend it to support MIPI CSI2 as well if you’re interested!
It should be noted that as a result of this work, Maxime Chevallier also prepared and delivered a talk From a video sensor to your display which was given at the Embedded Linux Conference Europe 2020. See the slides and video.
Allwinner MIPI CSI2 camera interface
As part of an internship in 2020 and then a customer project, Bootlin intern Kévin L’Hôpital and Bootlin engineer Paul Kocialkowski worked on extending the Allwinnera camera interface support with support for MIPI CSI2 cameras. In fact, this addition was done to two Allwinner camera interface drivers: the sun6i driver which is used on Allwinner A31 and V3s/V3/S3, and the sun8i-a83t, which is used on the Allwinner A83T.
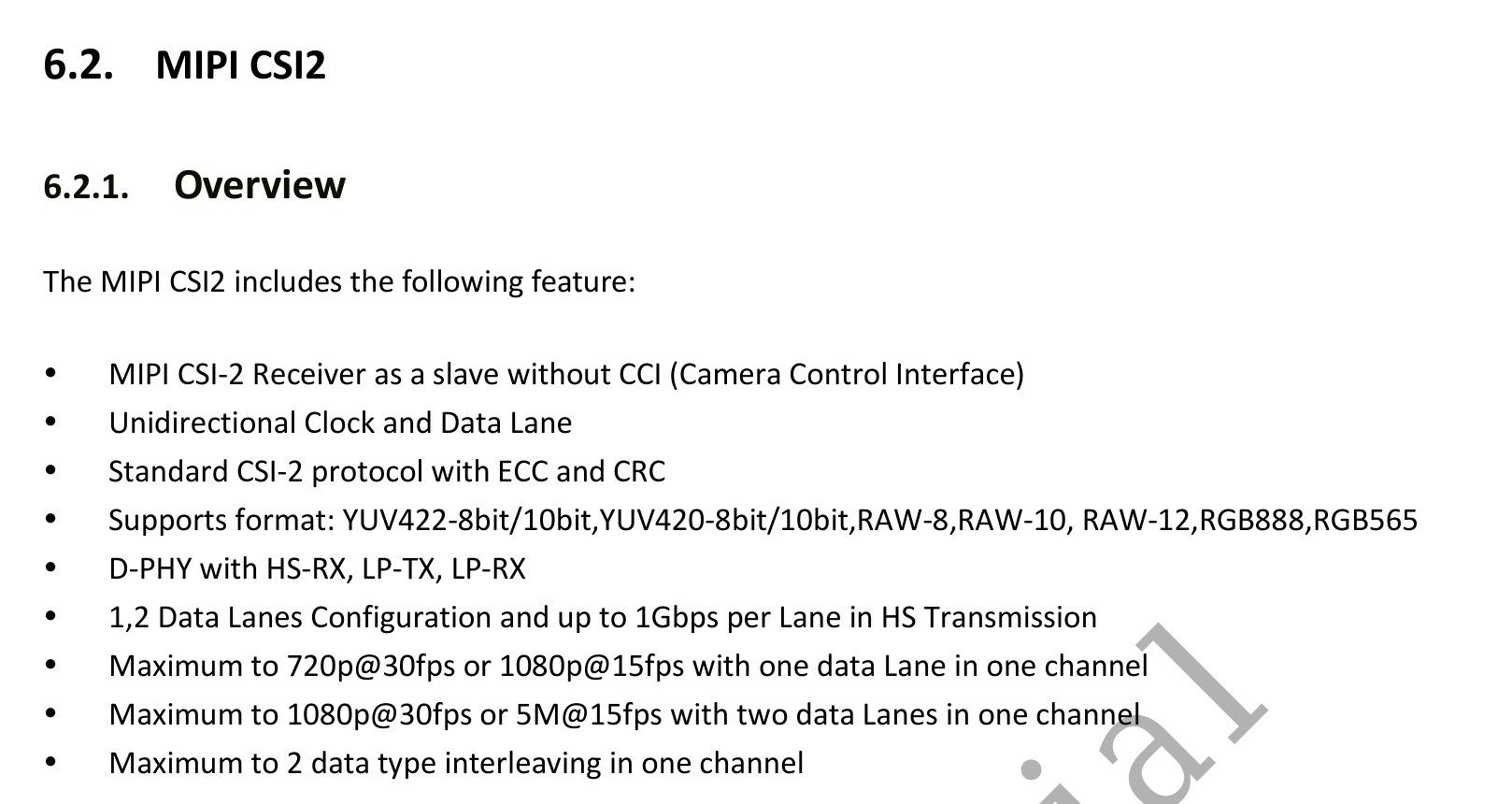
Through a fairly long 15 patches patch series, support for MIPI CSI2 is added to both camera interface controllers. We have tested both with Omnivision sensors, which are described below.
The series is currently in its third iteration, which was posted by Paul Kocialkowski on December 11, 2020 on the linux-media mailing list:
Paul Kocialkowski (15):
docs: phy: Add a part about PHY mode and submode
phy: Distinguish between Rx and Tx for MIPI D-PHY with submodes
phy: allwinner: phy-sun6i-mipi-dphy: Support D-PHY Rx mode for MIPI
CSI-2
media: sun6i-csi: Use common V4L2 format info for storage bpp
media: sun6i-csi: Only configure the interface data width for parallel
dt-bindings: media: sun6i-a31-csi: Add MIPI CSI-2 input port
media: sun6i-csi: Add support for MIPI CSI-2 bridge input
dt-bindings: media: Add A31 MIPI CSI-2 bindings documentation
media: sunxi: Add support for the A31 MIPI CSI-2 controller
ARM: dts: sun8i: v3s: Add nodes for MIPI CSI-2 support
MAINTAINERS: Add entry for the Allwinner A31 MIPI CSI-2 bridge
dt-bindings: media: Add A83T MIPI CSI-2 bindings documentation
media: sunxi: Add support for the A83T MIPI CSI-2 controller
ARM: dts: sun8i: a83t: Add MIPI CSI-2 controller node
MAINTAINERS: Add entry for the Allwinner A83T MIPI CSI-2 bridge
.../media/allwinner,sun6i-a31-csi.yaml | 88 ++-
.../media/allwinner,sun6i-a31-mipi-csi2.yaml | 149 ++++
.../media/allwinner,sun8i-a83t-mipi-csi2.yaml | 147 ++++
Documentation/driver-api/phy/phy.rst | 18 +
MAINTAINERS | 16 +
arch/arm/boot/dts/sun8i-a83t-bananapi-m3.dts | 2 +-
arch/arm/boot/dts/sun8i-a83t.dtsi | 26 +
arch/arm/boot/dts/sun8i-v3s.dtsi | 67 ++
drivers/media/platform/sunxi/Kconfig | 2 +
drivers/media/platform/sunxi/Makefile | 2 +
.../platform/sunxi/sun6i-csi/sun6i_csi.c | 165 +++--
.../platform/sunxi/sun6i-csi/sun6i_csi.h | 58 +-
.../platform/sunxi/sun6i-csi/sun6i_video.c | 53 +-
.../platform/sunxi/sun6i-csi/sun6i_video.h | 7 +-
.../platform/sunxi/sun6i-mipi-csi2/Kconfig | 12 +
.../platform/sunxi/sun6i-mipi-csi2/Makefile | 4 +
.../sunxi/sun6i-mipi-csi2/sun6i_mipi_csi2.c | 590 ++++++++++++++++
.../sunxi/sun6i-mipi-csi2/sun6i_mipi_csi2.h | 117 ++++
.../sunxi/sun8i-a83t-mipi-csi2/Kconfig | 11 +
.../sunxi/sun8i-a83t-mipi-csi2/Makefile | 4 +
.../sun8i-a83t-mipi-csi2/sun8i_a83t_dphy.c | 92 +++
.../sun8i-a83t-mipi-csi2/sun8i_a83t_dphy.h | 39 ++
.../sun8i_a83t_mipi_csi2.c | 657 ++++++++++++++++++
.../sun8i_a83t_mipi_csi2.h | 197 ++++++
drivers/phy/allwinner/phy-sun6i-mipi-dphy.c | 164 ++++-
drivers/staging/media/rkisp1/rkisp1-isp.c | 3 +-
include/linux/phy/phy-mipi-dphy.h | 13 +
27 files changed, 2581 insertions(+), 122 deletions(-)
create mode 100644 Documentation/devicetree/bindings/media/allwinner,sun6i-a31-mipi-csi2.yaml
create mode 100644 Documentation/devicetree/bindings/media/allwinner,sun8i-a83t-mipi-csi2.yaml
create mode 100644 drivers/media/platform/sunxi/sun6i-mipi-csi2/Kconfig
create mode 100644 drivers/media/platform/sunxi/sun6i-mipi-csi2/Makefile
create mode 100644 drivers/media/platform/sunxi/sun6i-mipi-csi2/sun6i_mipi_csi2.c
create mode 100644 drivers/media/platform/sunxi/sun6i-mipi-csi2/sun6i_mipi_csi2.h
create mode 100644 drivers/media/platform/sunxi/sun8i-a83t-mipi-csi2/Kconfig
create mode 100644 drivers/media/platform/sunxi/sun8i-a83t-mipi-csi2/Makefile
create mode 100644 drivers/media/platform/sunxi/sun8i-a83t-mipi-csi2/sun8i_a83t_dphy.c
create mode 100644 drivers/media/platform/sunxi/sun8i-a83t-mipi-csi2/sun8i_a83t_dphy.h
create mode 100644 drivers/media/platform/sunxi/sun8i-a83t-mipi-csi2/sun8i_a83t_mipi_csi2.c
create mode 100644 drivers/media/platform/sunxi/sun8i-a83t-mipi-csi2/sun8i_a83t_mipi_csi2.h
Here as well, the patch series has gone through a number of iterations, with significant reshaping to take into account the comments and feedback of other kernel developers and maintainers, so we hope to be near the point where it can be merged.
Omnivision OV8865 camera sensor driver
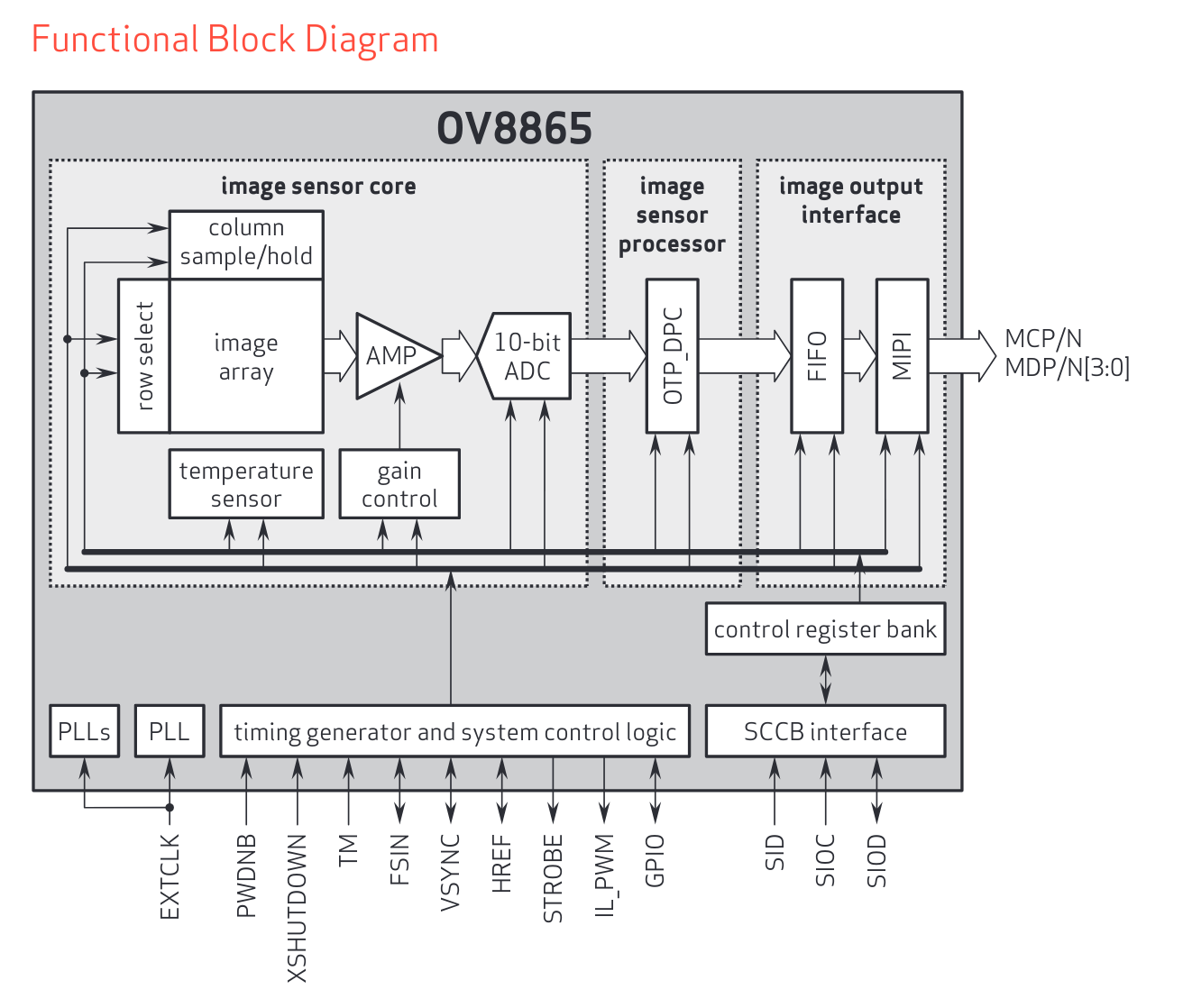
As part of his internship at Bootlin in 2020, Kévin L’Hôpital implemented a driver for the OV8865 camera sensor, connected over MIPI CSI2 to an Allwinner A83T platform. This OV8865 was then taken by Bootlin engineer Paul Kocialkowski, who did additional rework and polishing.
We are currently at the 4th iteration of this driver, which has been posted on December 11, 2020, and it has now been accepted and submitted to the V4L maintainer in a pull request.
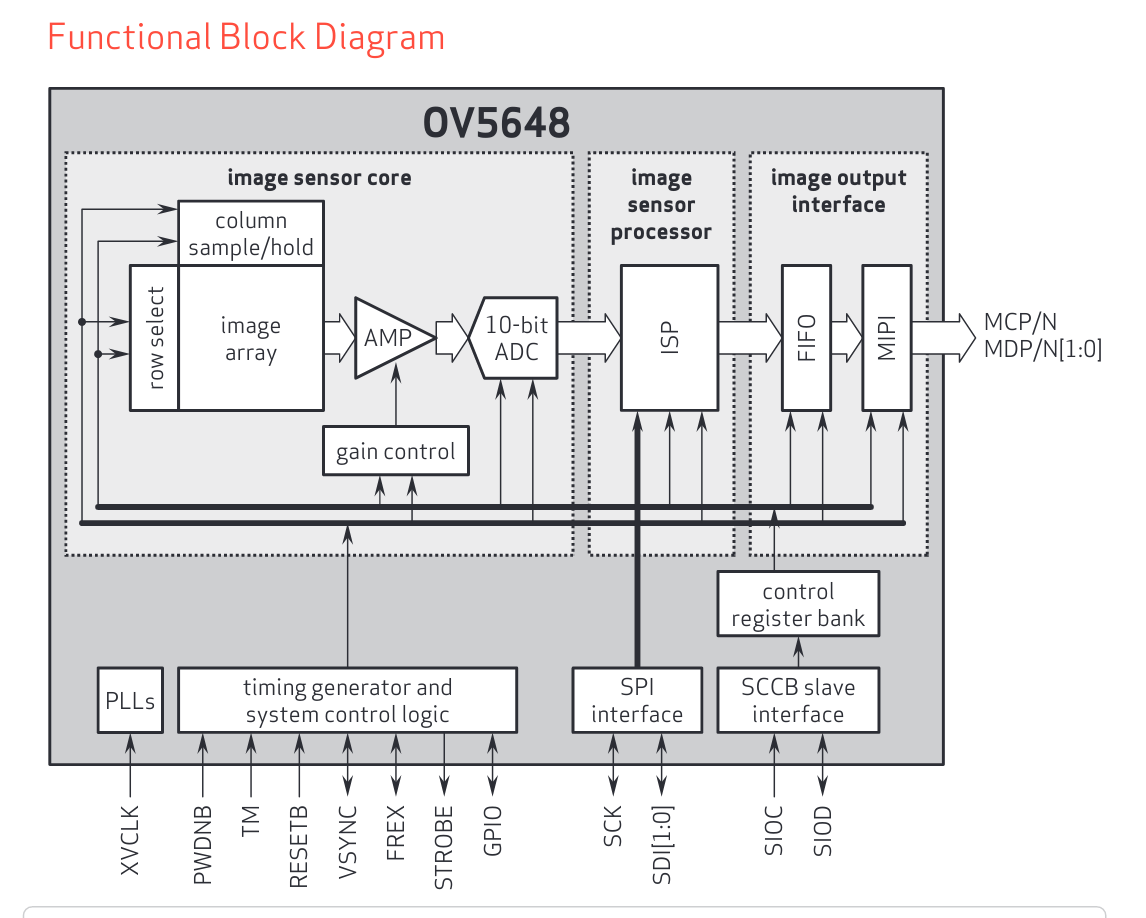
In addition to the work done by Bootlin intern Kévin L’Hôpital on OV8865 with Allwinner A83T, Paul Kocialkowski worked on OV5648 with Allwinner V3s, also connected over MIPI CSI2. This work results in a driver for the OV5648 camera sensor, which Paul has submitted to the linux-media mailing list.
This driver is now in is 5th iteration, posted on December 11, 2020, and it has now been accepted and submitted to the V4L maintainer in a pull request.
In addition to working on the Rockchip camera interface driver, Maxime Chevallier has also worked on a driver for the TW9900 PAL/NTSC video decoder. This chip from Renesas, takes as input an analog PAL or NTSC signal, digitizes it and outputs it on a parallel BT656 interface, which in our case was connected to a Rockchip PX30 platform.
Maxime posted the third iteration of the patch series adding this driver on December 22, 2020 on the linux-media mailing list.
In 2018 and thanks to success of the crowd-funding campaign we ran back then, Bootlin engineer Paul Kocialkowski pioneered support for stateless video decoders in the Linux kernel, with a first driver supporting MPEG2, H264 and H265 HW-accelerated video decoding on Allwinner platforms.
In 2020, Paul was tasked to work on HW-accelerated H264 video encoding for Rockchip platforms, which also use a stateless video encoder. Of course, Paul took the same approach of going towards an upstream-acceptable solution rather than relying on out-of-tree and vendor-specific solutions provided by Rockchip.
As explained in Paul’s talk, this is not fully ready for upstream, as lots of discussions are needed on the user-space APIs, especially around the topic of rate control.
If you are interested in having this work fully available in the upstream Linux kernel, please contact us. We are looking for additional funding and support to push this completely upstream.
Conclusion
As can be seen from the numerous topics covered in this blog post, Bootlin has significant experience with the Video4Linux subsystem, and is able to both implement support for new hardware, extend the Video4Linux subsystem if needed, and contribute drivers and changes to the official Linux kernel.