The Bootlin team wishes you a Happy New Year for 2015, with plenty of optimism and energy!
Bootlin is happy to take this opportunity to share some news about the latest training and contribution activities of the company.
Kernel contributions
We continue to work significantly on support for various ARM processors in the Linux kernel. Our contributions to the latest kernel releases:
- 147 patches from Bootlin merged in Linux 3.17, making Bootlin the 14th contributing company for this release by number of patches. See our blog post about this release.
- 155 patches from Bootlin merged in Linux 3.18, making Bootlin the 14th contributing company. See our blog post for more details.
- For the upcoming 3.19 release, we already have 196 patches merged.
One of the highlights was that we added support for the Atmel SAMA5D4 SoC to the Linux kernel even before the new chip was announced by Atmel! That’s a very positive sign for customers when an SoC is supported in the mainline Linux kernel sources right at product launch, instead of having to wait for months or years before the community developers can catch up.
Note that we also added Atmel SAMA5D3 SoC support to Xenomai, a hard real-time extension for the Linux kernel. Thanks to this, the Atmel SAMA5D3 Xplained board can now run with the 2.6.x release of Xenomai.
Besides those highlights, most of our kernel contributions were as usual centered around support for specific families of ARM processors: CPUs from Marvell EBU and Marvell Berlin, from Atmel and from Allwinner. We added a new network driver for some Marvell EBU processors, added SMP support for Marvell Berlin processors, added a DMA controller driver for Allwinner processors, and did a lot of maintenance work to support these processors in the mainline kernel.
Buildroot contributions
Our involvement into the Buildroot project, a popular embedded Linux build system, is going on. Our engineer Thomas Petazzoni contributed 136 patches to the 2014.11 release, making him the second contributor by number of patches. Thomas is also taking care of the maintenance of the project on a more regular basis, reviewing and merging patches from contributors.
OpenWRT contributions
We have recently started contributing to the OpenWRT project: improve the kernel support to use defconfig, introduce a notion of board to support different NAND configurations for each platform. We will soon to be pushing support for the Marvell Armada 385 platform, and improved support for the Marvell Armada 370 and XP platforms.
Recent projects
Besides our publicly visible kernel contributions, we do also work on customer-specific projects. Among the latest projects we have done:
- Develop a complete Board Support Package for a custom TI AM335x based platform: U-Boot porting, Linux kernel porting, and development of a Yocto-generated system. Qt5 and OpenGL are used for the graphical application, a fairly complex audio setup had to be supported, and many traditional interfaces as well (USB Host and Device, CAN, display, etc.)
- Develop a Board Support Package for a custom Marvell Armada 375 based platform for a telephony system. Not only did we port a Linux kernel on this platform, but we also wrote several DAHDI drivers to interface the telephony hardware of the platform with Asterisk.
- NAND and UBI stress-testing for a customer-specific Freescale i.MX28 based platform. We improved the NAND controller driver, added a new MTD tool to generate bitflips, and did some long term power-cut stress-testing of the UBIFS setup to ensure the reliability of the platform. See our kernel driver improvements and the new nandflipbits tool.
- Adapt an existing ADC driver for a customer-specific platform to the modern Industrial Input Output (IIO) subsystem of the kernel.
Conferences: FOSDEM, Embedded World and Embedded Linux Conference
Several Bootlin engineers will participate to the FOSDEM conference, taking place on January 30 and February 1 in Brussels. In addition, Thomas Petazzoni will be participating to the Buildroot Developers Meeting that takes place right after FOSDEM in the Google offices in Brussels.
Bootlin will participate to the Embedded World trade show on February 24-26 in Nuremberg, Germany. We will be present at Atmel’s booth and visiting exhibitor booths too. For people in Europe, this will be a good opportunity to ask your questions about our embedded Linux training and engineering services. In particular, you will be able meet our engineers Alexandre Belloni, Thomas Petazzoni (CTO), Michael Opdenacker (CEO) and Anja Roubin as well, the new person in charge of our training services.
This year again, most of the Bootlin engineering team (7 engineers) will participate to the 2015 edition of the Embedded Linux Conference on March 23-25 in San Jose, California. We submitted several talk proposals, but our presence won’t depend on the number of talks that are eventually accepted. Participating to this conference, and to its European edition in the fall too, is very important for us to make sure we do not miss any of the interesting developments in the technical community, and above all to strengthen our ties with the community developers. This helps us to be good technical trainers with valuable experience and information to share. The strong relationships with other community developers (and in particular with project maintainers) also help us when our customers contract us to add hardware support or features to official versions of community projects such as the Linux kernel.
Free technical documentation resources
Since the latest edition of this newsletter, we started running our new Yocto Project and OpenEmbedded course, and we released all training materials for this course. As usual, such materials are meant to be used by people learning by themselves too. All you have to do is get your hands on a Beaglebone Black board, read the slides and try to do the labs!
Our engineer Maxime Ripard also contributed documentation about the DMAEngine subsystem in the Linux kernel.
Upcoming training sessions – Now in Paris too!
The news is that we will run new public sessions in Paris, in addition to the ones we usually organize in Toulouse, Avignon and Lyon in France. We are starting with our embedded Linux and our Yocto courses, but other topics will follow too.
So, here are our next session dates:
- Embedded Linux kernel and driver development training, March 2-6, Toulouse, France (in French)
- Embedded Linux training, March 9-13, Paris, France (in French)
- Yocto Project and OpenEmbedded development training, March 9-11, Lyon, France (in French)
- Embedded Linux kernel and driver development training, March 30 – April 3, Avignon, France (in English)
- Embedded Linux training, May 18-22, Avignon, France (in English)
- Yocto Project and OpenEmbedded development training, May 20-22, Paris, France (in English)
- Embedded Linux training, June 1-5, Toulouse, France (in French)
- Android system development training, June 8-11, Toulouse, France (in English)
See sessions and dates for more details. Of course, we can also deliver our training courses at your location, anywhere in the world. Feel free to contact us for a quote.
If you are interested in more frequent news about Bootlin, you can follow us on Twitter, Google+ and LinkedIn.
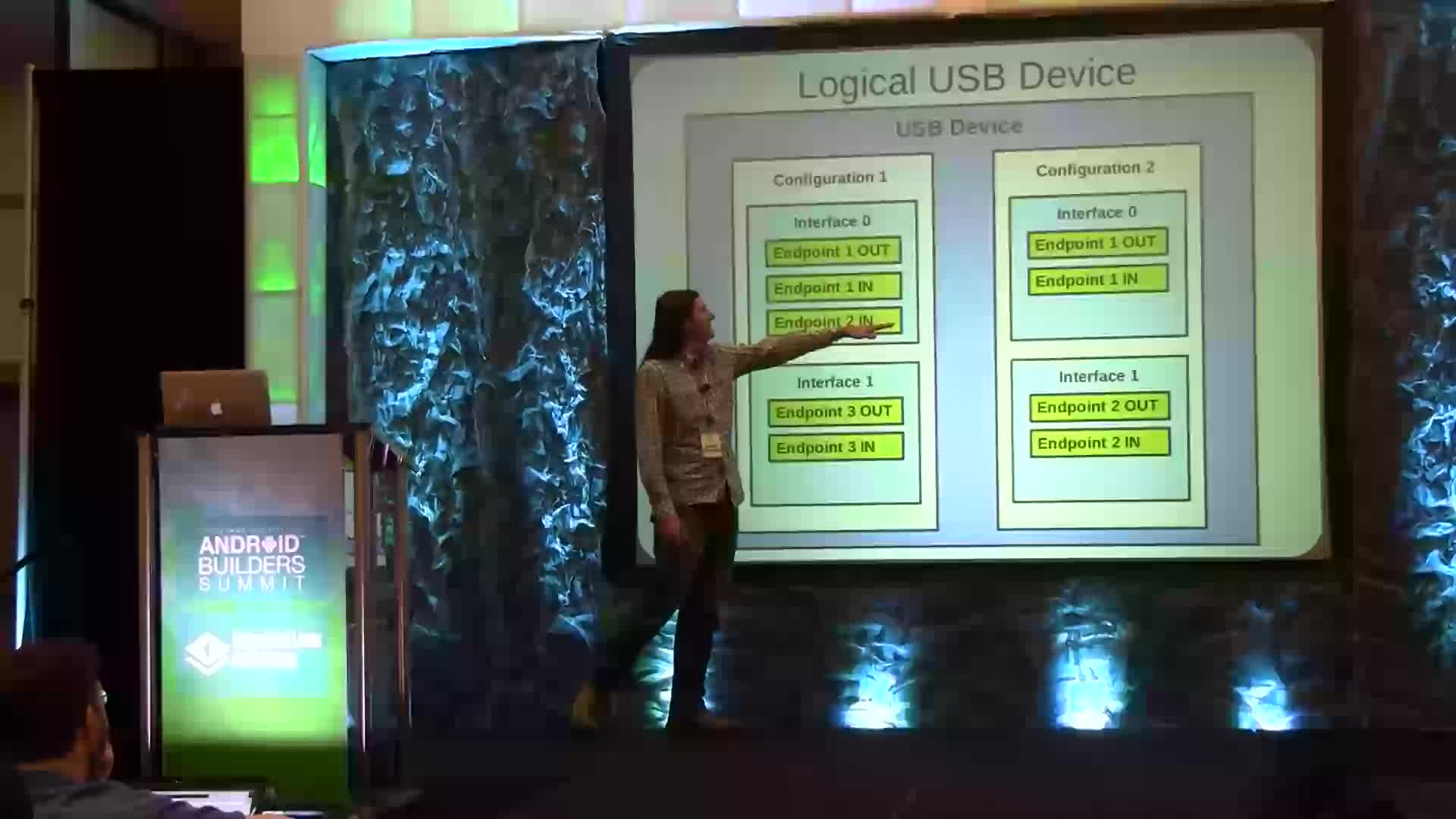
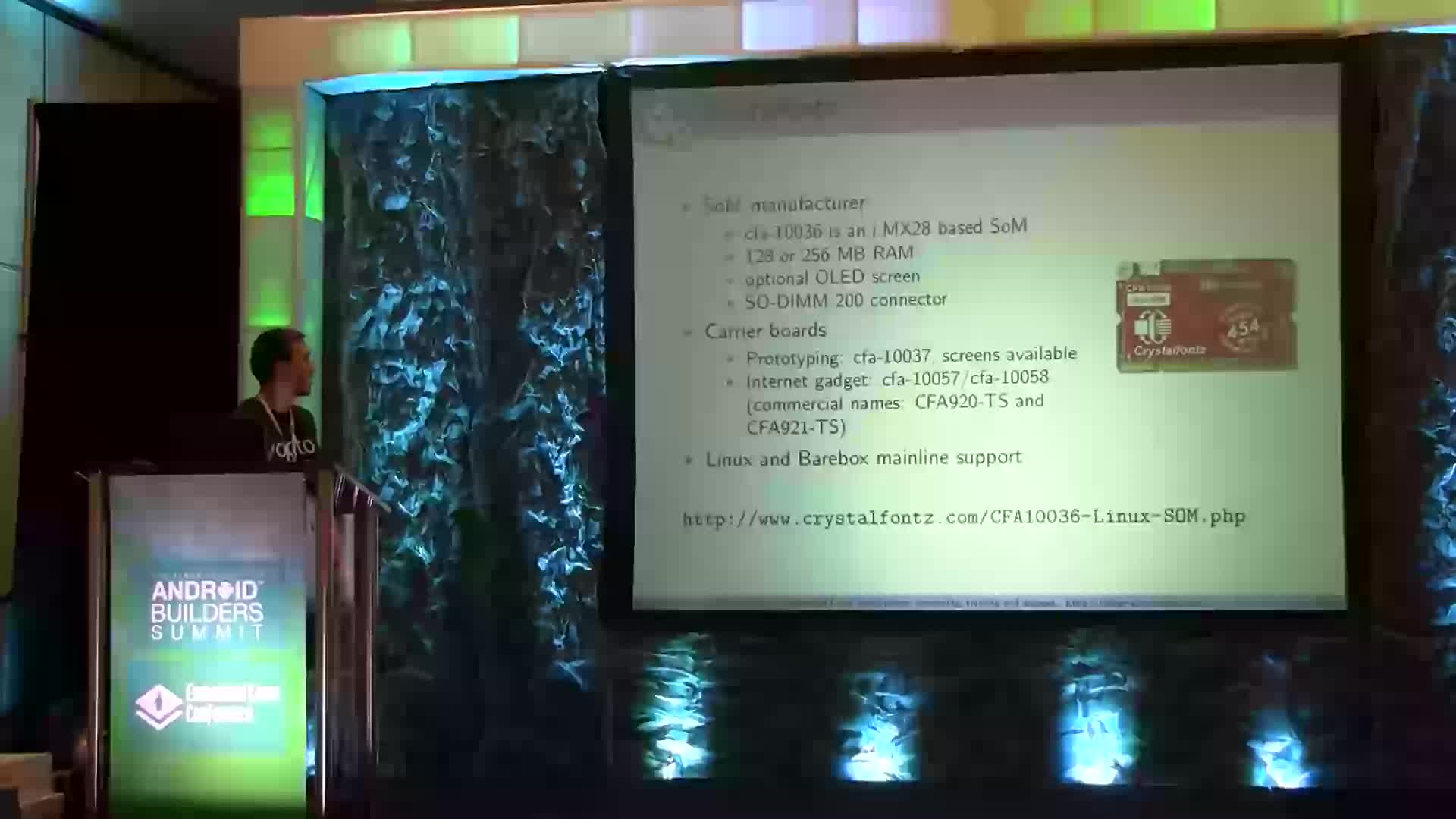



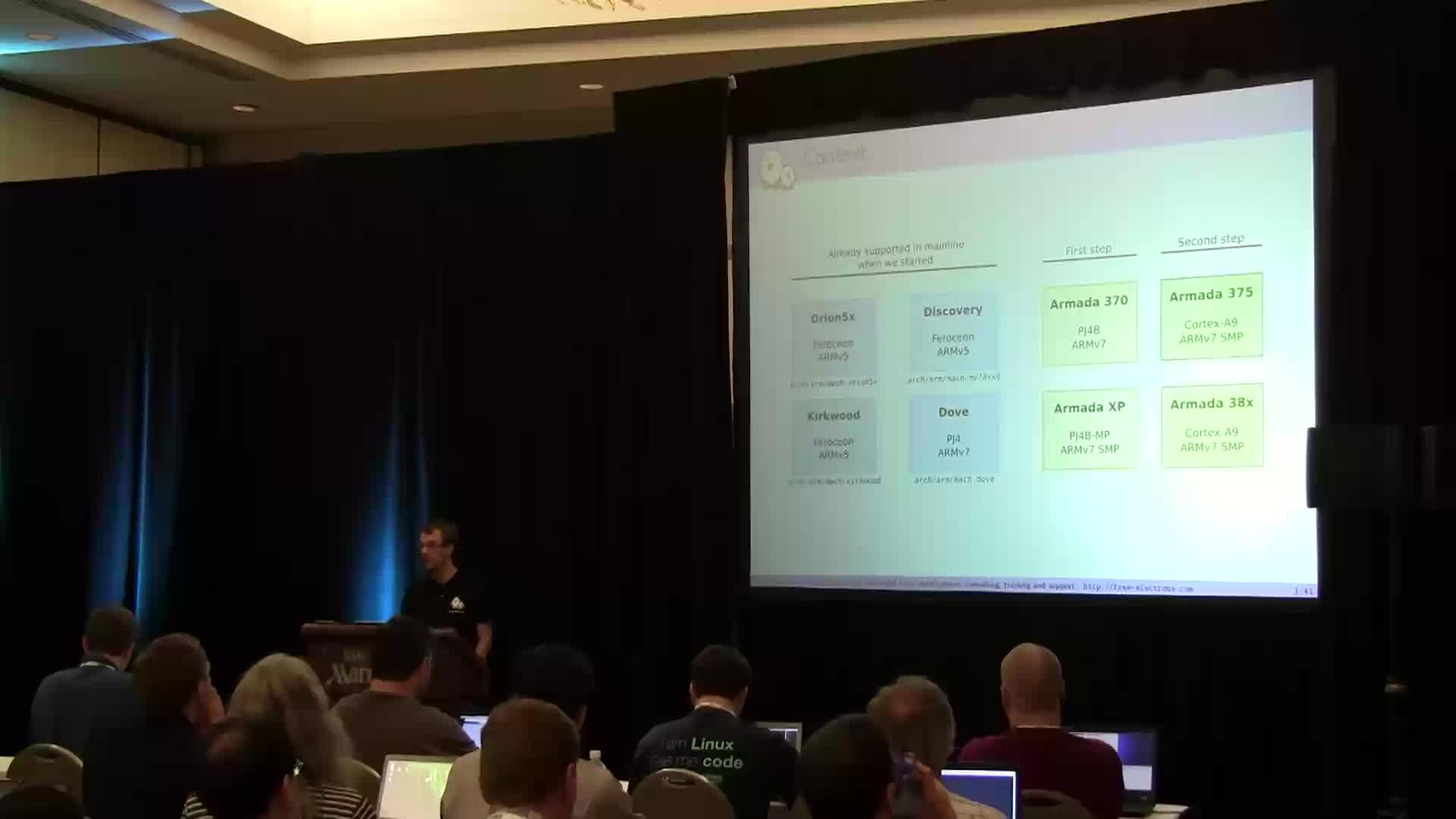

 Better late than never: we are finally publishing a set of videos of 24 talks from the last Embedded Linux Conference, which took place earlier this year in San Francisco, California. These videos are coming in addition to the videos that the Linux Foundation had posted from this conference on
Better late than never: we are finally publishing a set of videos of 24 talks from the last Embedded Linux Conference, which took place earlier this year in San Francisco, California. These videos are coming in addition to the videos that the Linux Foundation had posted from this conference on 























, Steven Rostedt")
