A French version also exists.
The Bootlin team wishes you a Happy New Year for 2014, with plenty of optimism and energy!
We are taking this opportunity to give some news about Bootlin.
In 2013, Bootlin significantly increased its contribution to open-source projects, especially at the Linux kernel level.
639 patches integrated in the Linux kernel, mainly to improve support for Marvell ARM processors and Allwinner ARM processors. For all kernel releases published in 2013, Bootlin has been in the top 30 contributing companies. We now have a significant experience in integrating support for ARM processors in the Linux kernel, and we expect to work more in this area in 2014.
595 patches integrated in the Buildroot embedded Linux build system, in a large number of areas, making Bootlin the second most important contributor after Buildroot’s maintainer. This effort allows Bootlin to keep an up-to-date expertise in cross-compilation and build systems.
26 patches integrated in the Barebox bootloader:
22 patches to the Yocto Freescale layer, mainly adding support for the Crystalfontz boards. In the process, a new image type was developed and significant improvements were made to the Barebox recipe.
Several of these contributions, and many other activities, were driven by development and consulting activities in 2013, with mainly:
- Linux kernel code development, adding and maintaining support for customer ARM processors or boards in the mainline Linux kernel. Especially on Marvell and Freescale processors.
- Linux kernel, driver development and build system integration for an Atmel SAMA5 based medical device.
- Development of Linux kernel drivers for radio-frequency transceivers, on an Atmel SAMA5 based home automation platform.
- Boot time optimization audits.
- Buildroot consulting and audit.
We have also significantly improved and updated our training courses:
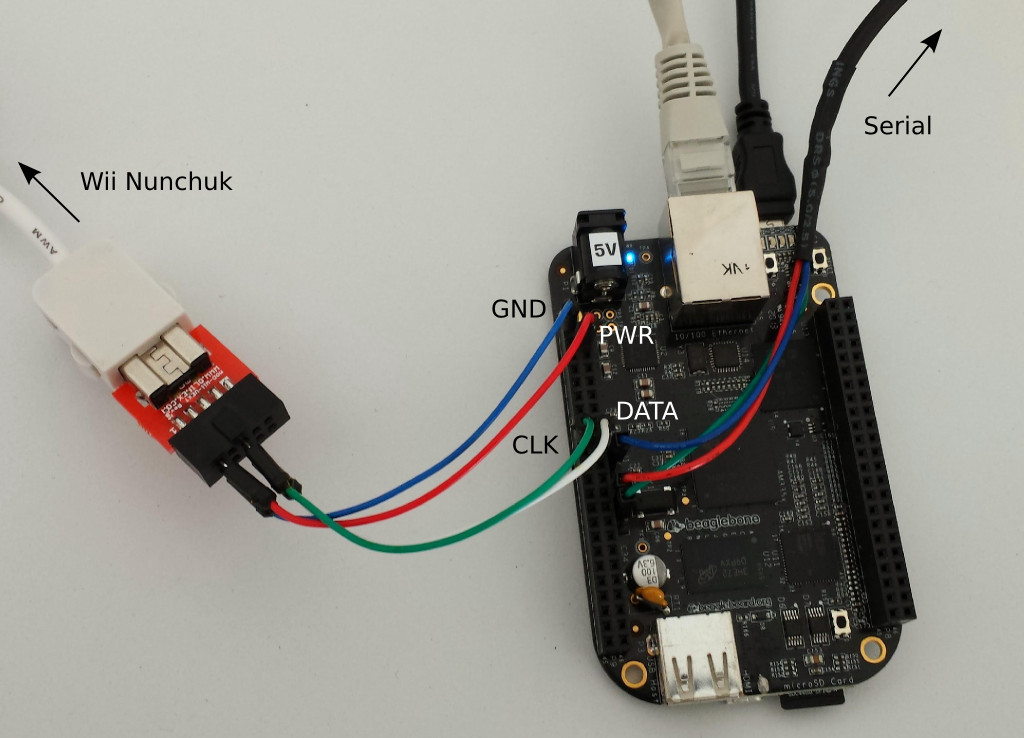
- Our embedded Linux and kernel driver development course was updated to use the BeagleBone Black platform, to cover the usage of the Device Tree on ARM platform, and to use a fun I2C device to illustrate the development of a device driver in our labs.
- Our Android system development course was updated to use Android 4.x, and use the BeagleBone Black as the development platform for the practical labs.
- Our embedded Linux system development course was updated to use more recent versions of the Linux kernel, in order to cover the usage of the Device Tree on ARM platforms.
Our training materials remain freely available under a Creative Commons license, including their source code, available from a public Git repository.
Bootlin continues to believe that participating to conferences is critical to keep its engineers up to date with the latest Linux developments and create connections with the developers of the Linux community which are essential to make our projects progress faster. For this purpose, we participated to a large number of conferences in 2013:
- FOSDEM 2013, in Brussels, Belgium. Our CTO and engineer Thomas Petazzoni gave a talk about ARM kernel development
- Buildroot Developers Meeting, Brussels, Belgium. Our engineer Thomas Petazzoni organized and participated to this 2-days meeting, sponsored by Google, to work on Buildroot developments.
- Embedded Linux Conference 2013 and Android Builders Summit 2013, in San Francisco, United States. Our engineer Gregory Clement gave a talk about the Linux kernel clock framework. Our engineer Thomas Petazzoni gave a talk about ARM kernel development. See also our videos.
- Linaro Connect Europe 2013, Dublin Ireland. Our engineer Thomas Petazzoni participated to numerous discussions related to support for ARM processors in the Linux kernel.
- Linux Plumbers 2013, New Orleans, United States. Our engineer Maxime Ripard attended the conference, and participated to discussions around Android and Linux kernel development.
- Kernel Recipes, Paris, France. Both Bootlin CEO Michael Opdenacker and CTO Thomas Petazzoni participated to this Linux kernel conference, and Thomas gave two talks: one about ARM kernel development and one about Buildroot.
- ARM kernel mini-summit 2013, Edinburgh, UK. Our engineers Gregory Clement, Thomas Petazzoni and Maxime Ripard participated to the invitation-only ARM kernel mini-summit. This summit is the key place to discuss and define the next directions for support for ARM processors in the Linux kernel.
- Embedded Linux Conference Europe, Edinburgh, UK. Gregory Clement gave a talk about about the Linux kernel clock framework and Thomas Petazzoni gave a talk about the Device Tree.
- Buildroot Developers Meeting, Edinburgh, UK. Our engineer Thomas Petazzoni organized and participated to this 2-days meeting, sponsored by Imagination Technologies, to work on Buildroot development.
A very important development of Bootlin in 2013 is the addition of a new engineer to our team: Alexandre Belloni joined us in March 2013. Alexandre has a very significant embedded Linux and kernel experience, see his profile.
Now, let’s talk about our plans for 2014:
As in 2013, we will participate to several key conferences. We have already planned our participation to: Linux Conf Australia (January 2014), FOSDEM (February 2014), Embedded Linux Conference (April 2014) and the Embedded Linux Conference Europe (October 2014).
You can follow Bootlin news by reading our blog and by following our quick news on Twitter. We now have a Google+ page too.
Again, Happy New Year!
The Bootlin team.


 As usual, our training materials are available under the terms of the
As usual, our training materials are available under the terms of the