As discussed in our previous blog post, Bootlin had a strong presence at the Embedded Linux Conference Europe, with 7 attendees, 4 talks, one BoF and one poster during the technical show case.
In this blog post, we would like to highlight a number of talks from the conference that we found interesting. Each Bootlin engineer who attended the conference has selected one talk, and gives his/her feedback about this talk.
uClibc Today: Still Makes Sense – Alexey Brodkin
Talk selected by Michael Opdenacker
 Alexey Brodkin, an active contributor to the uClibc library, shared recent updates about this C library, trying to show people that the project was still active and making progress, after a few years during which it appeared to be stalled. Alexey works for Synopsys, the makers of the ARC architecture, which uClibc supports.
Alexey Brodkin, an active contributor to the uClibc library, shared recent updates about this C library, trying to show people that the project was still active and making progress, after a few years during which it appeared to be stalled. Alexey works for Synopsys, the makers of the ARC architecture, which uClibc supports.
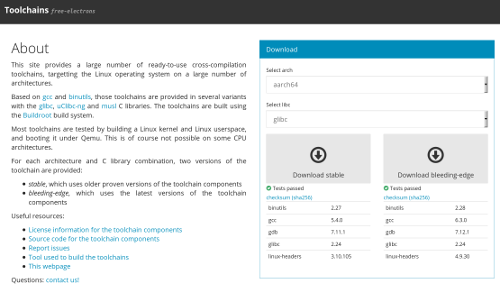
If you look at the repository for uClibc releases, you will see that since version 1.0.0 released in 2015, the project has made 26 releases according to a predictable schedule. The project also runs runtime regression tests on all its releases, which weren’t done before. The developers have also added support for 4 new architectures (arm64 in particular), and uClibc remains the default C library that Buildroot proposes.
Alexey highlighted that in spite of the competition from the musl library, which causes several projects to switch from uClibc to musl, uClibc still makes a lot of sense today. As a matter of fact, it supports more hardware architectures than glibc and musl do, as it’s the only one to support platforms without an MMU (such as noMMU ARM, Blackfin, m68k, Xtensa) and as the library size is still smaller that what you get with musl (though a static hello_world program is much smaller with musl if you have a close look at the library comparison tests he mentioned).
Alexey noted that the uClibc++ project is still alive too, and used in OpenWRT/Lede by default.
Read the slides and watch the video of his talk.
Identifying and Supporting “X-Compatible” hardware blocks – Chen-Yu Tsai
Talk selected by Quentin Schulz
 An SoC is made of multiple IP blocks from different vendors. In some cases the source or model of the hardware blocks are neither documented nor marketed by the SoC vendor. However, since there are only very few vendors of a given IP block, stakes are high that your SoC vendor’s undocumented IP block is compatible with a known one.
An SoC is made of multiple IP blocks from different vendors. In some cases the source or model of the hardware blocks are neither documented nor marketed by the SoC vendor. However, since there are only very few vendors of a given IP block, stakes are high that your SoC vendor’s undocumented IP block is compatible with a known one.
With his experience in developing drivers for multiple IP blocks present in Allwinner SoCs and as a maintainer of those same SoCs, Chen-Yu first explained that SoC vendors often either embed some vendors’ licensed IP blocks in their SoCs and add the glue around it for platform- or SoC-specific hardware (clocks, resets and control signals), or they clone IP blocks with the same logic but some twists (missing, obfuscated or rearranged registers).
To identify the IP block, we can dig into the datasheet or the vendor BSP and compare those with well documented datasheets such as the one for NXP i.MX6, TI KeyStone II or the Zynq UltraScale+ MPSoC, or with mainline drivers. Asking the community is also a good idea as someone might have encountered an IP with the same behaviour before and can help us identify it quicker.
Some good identifiers for IPs could be register layouts or names along with DMA logic and descriptor format. For the unlucky ones that have been provided only a blob, they can look for the symbols in it and that may slightly help in the process.
He also mentioned that identifying an IP block is often the result of the developer’s experience in identifying IPs and other time just pure luck. Unfortunately, there are times when someone couldn’t identify the IP and wrote a complete driver just to be told by someone else in the community that this IP reminds him of that IP in which case the work done can be just thrown away. That’s where the community plays a strong role, to help us in our quest to identify an IP.
Chen-Yu then went on with the presentation of the different ways to handle the multiple variants of an IP blocks in drivers. He said that the core logic of all IP drivers is usually presented as a library and that the different variants have a driver with their own resources, extra setup and use this library. Also, a good practice is to use booleans to select features of IP blocks instead of using the ID of each variant.
For IPs whose registers have been altered, the way to go is usually to write a table for the register offsets, or use regmaps when bitfields are also modified. When the IP block differs a bit too much, custom callbacks should be used.
He ended his talk with his return from experience on multiple IP blocks (UART, USB OTG, GMAC, EMAC and HDMI) present in Allwinner SoCs and the differences developers had to handle when adding support for them.
Read the slides and watch the video of his talk.
printk(): The Most Useful Tool is Now Showing its Age – Steven Rostedt & Sergey Senozhatsky
Talks selected by Boris Brezillon. Boris also covered the related talk “printk: It’s Old, What Can We Do to Make It Young Again?” from the same speakers.
 Maybe I should be ashamed of saying that but
Maybe I should be ashamed of saying that but printk() is one of the basic tool I’m using to debug kernel code, and I must say it did the job so far, so when I saw these presentations talking about how to improve printk() I was a bit curious. What could be wrong in printk() implementation?
Before attending the talks, I never digged into printk()’s code, because it just worked for me, but what I thought was a simple piece of code appeared to be a complex infrastructure with locking scheme that makes you realize how hard it is when several CPUs are involved.
At its core, printk() is supposed to store logs into a circular buffer and push new entries to one or several consoles. In his first talk Steven Rostedt walked through the history of printk() and explained why it became more complex when support for multi CPU appeared. He also detailed why printk() is not re-entrant and the problem it causes when called from an NMI handler. He finally went through some fixes that made the situation a bit better and advertised the 2nd half of the talk driven by Sergey Senozhatsky.
Note that between these two presentations, the printk() rework has been discussed at Kernel Summit, so Sergey already had some feedback on his proposals. While Steven presentation focused mainly on the main printk() function, Sergey gave a bit more details on why printk() can deadlock, and one of the reasons why preventing deadlocks is so complicated is that printk() delegates the ‘print to console’ aspect to console drivers which have their own locking scheme. To address that, it is proposed to move away from the callback approach and let console drivers poll for new entries in the console buffer instead, which would remove part of the locking issues. The problem with this approach is that it brings even more uncertainty on when the logs are printed on the consoles, and one of the nice things about printk() in its current form is that you are likely to have the log printed on the output before printk() returns (which helps a lot when you debug things).
He also mentioned other solutions to address other possible deadlocks, but I must admit I got lost at some point, so if you’re interested in this topic I recommend that you watch the video (printk(): The Most Useful Tool is Now Showing its Age, sadly no video is available for the second talk) and read the slides (printk(): The Most Useful Tool is Now Showing its Age and printk: It’s Old, What Can We Do to Make It Young Again?).
More robust I2C designs with a new fault-injection driver – Wolfram Sang
Talk selected by Miquèl Raynal
 Although Wolfram had a lot of troubles starting its presentation lacking a proper HDMI adaptater, he gave an illuminating talk about how, as an I2C subsystem maintainer, he would like to strengthen the robustness of I2C drivers.
Although Wolfram had a lot of troubles starting its presentation lacking a proper HDMI adaptater, he gave an illuminating talk about how, as an I2C subsystem maintainer, he would like to strengthen the robustness of I2C drivers.
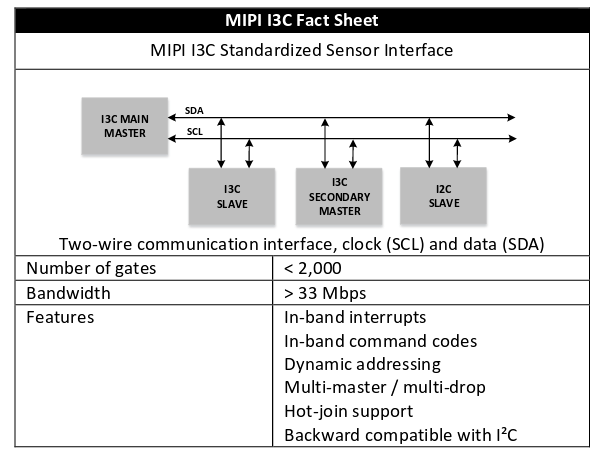
He first explained some basics of the I2C bus like START and STOP conditions and introduced us to a few errors he regularly spots in drivers. For instance, some badly written drivers used a START and STOP sequence while a “repeated START” was needed. This is very bad because another master on the bus could, in this little spare idle delay, decide to grab the medium and send its message. Then the message right after the repeated START would not have the expected effect. Of course plenty other errors can happen: stalled bus (SDA or SCL stuck low), lost arbitration, faulty bits… All these situations are usually due to incorrect sequences sent by the driver.
To avoid so much pain debugging obscure situations where this happens, he decided to use an extended I2C-gpio interface to access SDA and SCL from two external GPIOs and this way forces faulty situations by simply pinning high or low one line (or both) and see how the driver reacts. The I2C specification and framework provide everything to get out of a faulty situation, it is just a matter of using it (sending a STOP condition, clocking 9 times, operate a reset, etc).
Wolfram is aware of his quite conservative approach but he is really scared about breaking users by using random quirks so he tried with this talk to explain his point of view and the solutions he wants to promote.
Two questions that you might have a hard time hearing were also interesting. The first person asked if he ever considered using a “default faulty chip” designed to do by itself this kind of fault injection and see how the host reacts and behaves. Wolfram said buying hardware is too much effort for debugging, so he was more motivated to get something very easy and straightforward to use. Someone else asked if he thought about multiple clients situation, but from Wolfram’s point of view, all clients are in the same state whether the bus is busy or free and should not badly behave if we clock 9 times.
Watch the video and grab the slides.
HDMI 4k Video: Lessons Learned – Hans Verkuil
Talk selected by Maxime Ripard
 Having worked recently on a number of display related drivers, it was quite natural to go see what I was probably going to work on in a quite close future.
Having worked recently on a number of display related drivers, it was quite natural to go see what I was probably going to work on in a quite close future.
Hans started by talking about HDMI in general, and the various signals that could go through it. He then went on with what was basically a war story about all the mistakes, gotchas and misconceptions that he encountered while working on a video-conference box for Cisco. He covered the hardware itself, but also more low-level oriented aspects, such as the clocks frequencies needed to operate properly, the various signals you could look at for debugging or the issues that might come with the associated encoding and / or color spaces, especially when you want to support as many displays as you can. He also pointed out the flaws in the specifications that might lead to implementation inconsistencies. He concluded with the flaws of various HDMI adapters, the issues that might arise using them on various OSes, and how to work around them when doable.
Watch the video and the slides.
The Serial Device Bus – Johan Hovold
Talk selected by Thomas Petazzoni
 Johan started his talk at ELCE by exposing the problem with how serial ports (UARTs) are currently handled in the Linux kernel. Serial ports are handled by the TTY layer, which allows user-space applications to send and receive data with what is connected on the other side of the UART. However, the kernel doesn’t provide a good mechanism to model the device that is connected at the other side of the UART, such as a Bluetooth chip. Due to this, people have resorted to either writing user-space drivers for such devices (which falls short when those devices need additional resources such as regulators, GPIOs, etc.) or to developing specific TTY line-discipline in the kernel. The latter also doesn’t work very well because a line discipline needs to be explicitly attached to a UART to operate, which requires a user-space program such as hciattach used in Bluetooth applications.
Johan started his talk at ELCE by exposing the problem with how serial ports (UARTs) are currently handled in the Linux kernel. Serial ports are handled by the TTY layer, which allows user-space applications to send and receive data with what is connected on the other side of the UART. However, the kernel doesn’t provide a good mechanism to model the device that is connected at the other side of the UART, such as a Bluetooth chip. Due to this, people have resorted to either writing user-space drivers for such devices (which falls short when those devices need additional resources such as regulators, GPIOs, etc.) or to developing specific TTY line-discipline in the kernel. The latter also doesn’t work very well because a line discipline needs to be explicitly attached to a UART to operate, which requires a user-space program such as hciattach used in Bluetooth applications.
In order to address this problem, Johan picked up the work initially started by Rob Herring (Linaro), which consisted in writing a serial device bus (serdev in short), which consists in turning UART into a proper bus, with bus controllers (UART controllers) and devices connected to this bus, very much like other busses in the Linux kernel (I2C, SPI, etc.). serdev was initially merged in Linux 4.11, with some improvements being merged in follow-up versions. Johan then described in details how serdev works. First, there is a TTY port controller, which instead of registering the traditional TTY character device will register the serdev controller and its slave devices. Thanks to this, one can described in its Device Tree child nodes of the UART controller node, which will be probed as serdev slaves. There is then a serdev API to allow the implementation of serdev slave drivers, that can send and receive data of the UART. Already a few drivers are using this API: hci_serdev, hci_bcm, hci_ll, hci_nokia (Bluetooth) and qca_uart (Ethernet).
We found this talk very interesting, as it clearly explained what is the use case for serdev and how it works, and it should become a very useful subsystem for many embedded applications that use UART-connected devices.
Watch the video and the slides.
GStreamer for Tiny Devices – Olivier Crête
Talk selected by Grégory Clement
 The purpose of this talk was to show how to shrink Gstreamer to make it fit in an embedded Linux device. First, Olivier Crête introduced what GStreamer is, it was very high level but well done. Then after presenting the issue, he showed step by step how he managed to reduce the footprint of a GStreamer application to fit in his device.
The purpose of this talk was to show how to shrink Gstreamer to make it fit in an embedded Linux device. First, Olivier Crête introduced what GStreamer is, it was very high level but well done. Then after presenting the issue, he showed step by step how he managed to reduce the footprint of a GStreamer application to fit in his device.
In a first part it was a focus on features specific to GStreamer such as how to generate only the needed plugins. Then most of the tricks showed could be used for any C or C++ application. The talk was pretty short so there was no useless or boring part Moreover, the speaker himself was good and dynamic.
To conclude it was a very pleasant talk teaching step by step how to reduce the footprint of an application being GStreamer or not.

 Linux 4.13 was
Linux 4.13 was