With the approaching Embedded Linux Conference, to be held February 20-22 in San Francisco, we felt that it was time to finally fight with ffmpeg/libav and get the videos we had taken from the last Embedded Linux Conference Europe talks, encode them and publish them online. So here they are, as what we could consider a late Christmas gift.
There are so many talks that it might be hard to watch everything. So I’d like to share with you my preferred talks from this last ELCE (of course, I haven’t been able to see all talks, but only a third of them, so the following selection is only taken from the talks I have seen) :
- For sure, the talk I have preferred is the Understanding PREEMPT_RT (The Real-Time Patch) talk from Steven Rostedt (Redhat). In an hour, Steven explained some very interesting internals of PREEMPT_RT, in a very clear way. Definitely a must see, in my opinion.
- I also enjoyed the ARC Linux: From a Tumbling Toddler to a Graduating Teen talk from Vineet Gupta (Synopsys). While talking about a specific new CPU architecture that probably most of us have never used, Vineet is able to tell a very nice story by bringing you through various issues they had while porting Linux on this new CPU architecture, giving interesting and funny technical details in the process.
- The talk about Regmap: The Power of Subsystems and Abstractions from Mark Brown (Wolfson Microelectronics) was also very good, in that it clearly explained the need for this new kernel subsystem, how the API works, etc. Definitely the kind of talk I’d like to see about more kernel subsystems: in an hour, you learn the philosophy of the subsystem, why it’s there, how it has been designed to solve the original problems, and the basics of its APIs. It’s often what’s missing from an API documentation: the philosophy behind it. Hour long talks that are capable of conveying this philosophy are therefore highly useful.
- As usual, David Anders talk, this time about Board bringup: you, me and I2C has been very nice as well. It is a good introduction about electronics related to I2C, it doesn’t go very far for anyone having an existing experience of I2C, but is indeed a very good introduction for those who don’t. I really enjoyed the good explanation about pull-up resistors.
- Finally, another talk that was great is Samuel Ortiz (Intel) talk about Near Field Communication with Linux. A bit like the Regmap talk, the great benefit of Samuel talk is that in an hour, he went through the different hardware available for NFC in Linux, the architecture of the software stack, the different software components that exist, their strenghts and weaknesses and so on. So without any prior knowledge about NFC, you get at the end of the talk a very good coverage of how this technology is supported by Linux today.
Well, enough with my suggestions, here is the complete list of videos:
Matt Ranostay
Beaglebone: The Perfect Telemetry Platform?
Slides
Video (24 minutes):
full HD (153M), 800×450 (74M)
Jim Huang
0xlab
Implement Checkpointing for Android
Slides
Video (43 minutes):
full HD (291M), 800×450 (168M)
Wolfram Sang
Pengutronix e.K.
Maintainer’s Diary: Devicetree and Its Stumbling Blocks
Slides
Video (49 minutes):
full HD (329M), 800×450 (160M)
Matthias Brugger
ISEE 2007 S.L.
A War Story: Porting Android 4.0 to a Custom Board
Slides
Video (34 minutes):
full HD (230M), 800×450 (106M)
Kishon Vijay Abraham
Texas Instruments
USB Debugging and Profiling Techniques
Slides
Video (40 minutes):
full HD (245M), 800×450 (109M)
Alan Ott
Signal 11 Software
Wireless Networking with IEEE 802.15.4 and 6LoWPAN
Slides
Video (52 minutes):
full HD (339M), 800×450 (156M)
João Paulo Rechi Vita
INdT
Bluetooth Smart devices and Low Energy support on Linux
Slides
Video (36 minutes):
full HD (250M), 800×450 (116M)
Peter Stuge
OpenOCD: Hardware Debugging and More
Video (47 minutes):
full HD (316M), 800×450 (155M)
Alessandro Rubini
PF_ZIO: Using Network Frames to Convey I/O Data and Meta-Data
Slides
Video (48 minutes):
full HD (317M), 800×450 (141M)
Joo-Young Hwang
Samsung
A New File System Designed for Flash Storage in Mobile
Slides
Video (54 minutes):
full HD (369M), 800×450 (152M)
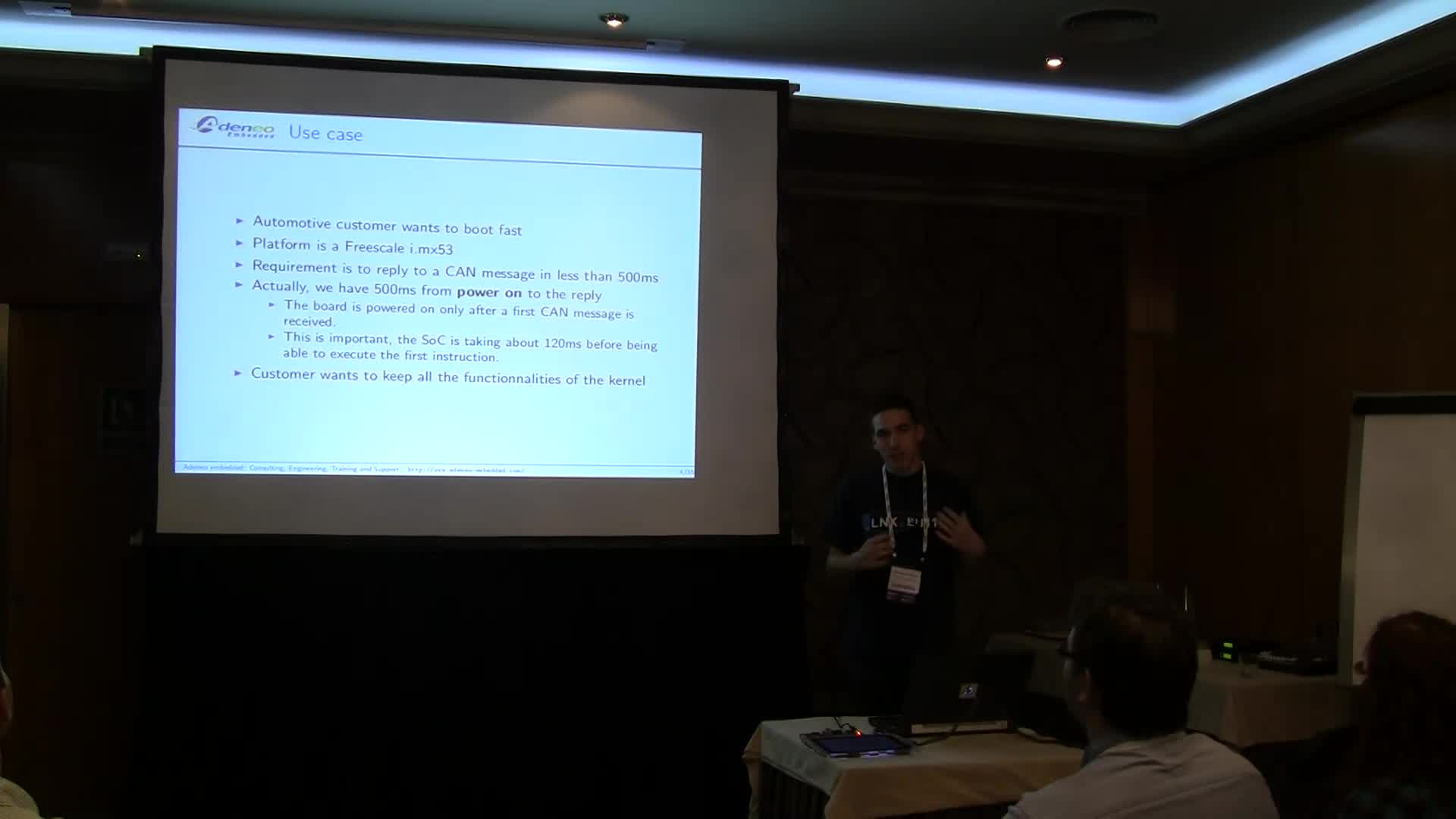
Alexandre Belloni
Adeneo Embedded
Boot Time Optimizations
Slides
Video (39 minutes):
full HD (261M), 800×450 (129M)
Philipp Zabel
Pengutronix e.K.
Modular Graphics on Embedded ARM
Slides
Video (32 minutes):
full HD (217M), 800×450 (100M)
Karim Yaghmour
Opersys
Inside Android’s User Interface
Slides
Video (42 minutes):
full HD (284M), 800×450 (117M)
Samuel Ortiz
Intel
Near Field Communication with Linux
Slides
Video (35 minutes):
full HD (232M), 800×450 (92M)
Arnout Vandecappelle
Essensium/Mind
Upgrading Without Bricking
Slides
Video (56 minutes):
full HD (373M), 800×450 (172M)
Tim Bird
Sony Network Entertainment
BoFs: Developer Tools and Methods: Tips & Tricks
Slides
Video (62 minutes):
full HD (395M), 800×450 (160M)
Matt Locke
Texas Instruments
Are We Headed for a Complexity Apocalypse in Embedded SoCs?
Video (27 minutes):
full HD (167M), 800×450 (76M)
Sascha Hauer
Pengutronix e.K.
Barebox Bootloader
Slides
Video (47 minutes):
full HD (313M), 800×450 (134M)
Benjamin Zores
Alcatel-Lucent
Dive Into Android Networking: Adding Ethernet Connectivity
Slides
Video (46 minutes):
full HD (270M), 800×450 (118M)
Jiyoun Park
Samsung
Experiences as an OEM with Development of UI Frameworks
Video (42 minutes):
full HD (282M), 800×450 (158M)
Keshava Munegowda
Texas Instruments
FFSB and IOzone: File system Benchmarking Tools, Features and Internals
Slides
Video (56 minutes):
full HD (367M), 800×450 (171M)
Chris Simmonds
2net Limited
The End of Embedded Linux (As We Know It)
Slides
Video (47 minutes):
full HD (324M), 800×450 (150M)
Steven Rostedt
Red Hat
Understanding PREEMPT_RT (The Real-Time Patch)
Slides
Video (61 minutes):
full HD (412M), 800×450 (186M)
Klaas van Gend
Vector Fabrics
Application Parallelization for Multi-Core Android Devices
Slides
Video (44 minutes):
full HD (293M), 800×450 (124M)
David Anders
Texas Instruments
Board Bringup: You, Me, and I2C
Slides
Video (38 minutes):
full HD (217M), 800×450 (97M)
Rama Pallala
Intel
Linux Power Supply Charging Subsystem
Video (35 minutes):
full HD (213M), 800×450 (83M)
Agusti Fontquerni
ISEE 2007 S.L.
Embedded Linux RADAR Device
Slides
Video (50 minutes):
full HD (331M), 800×450 (140M)
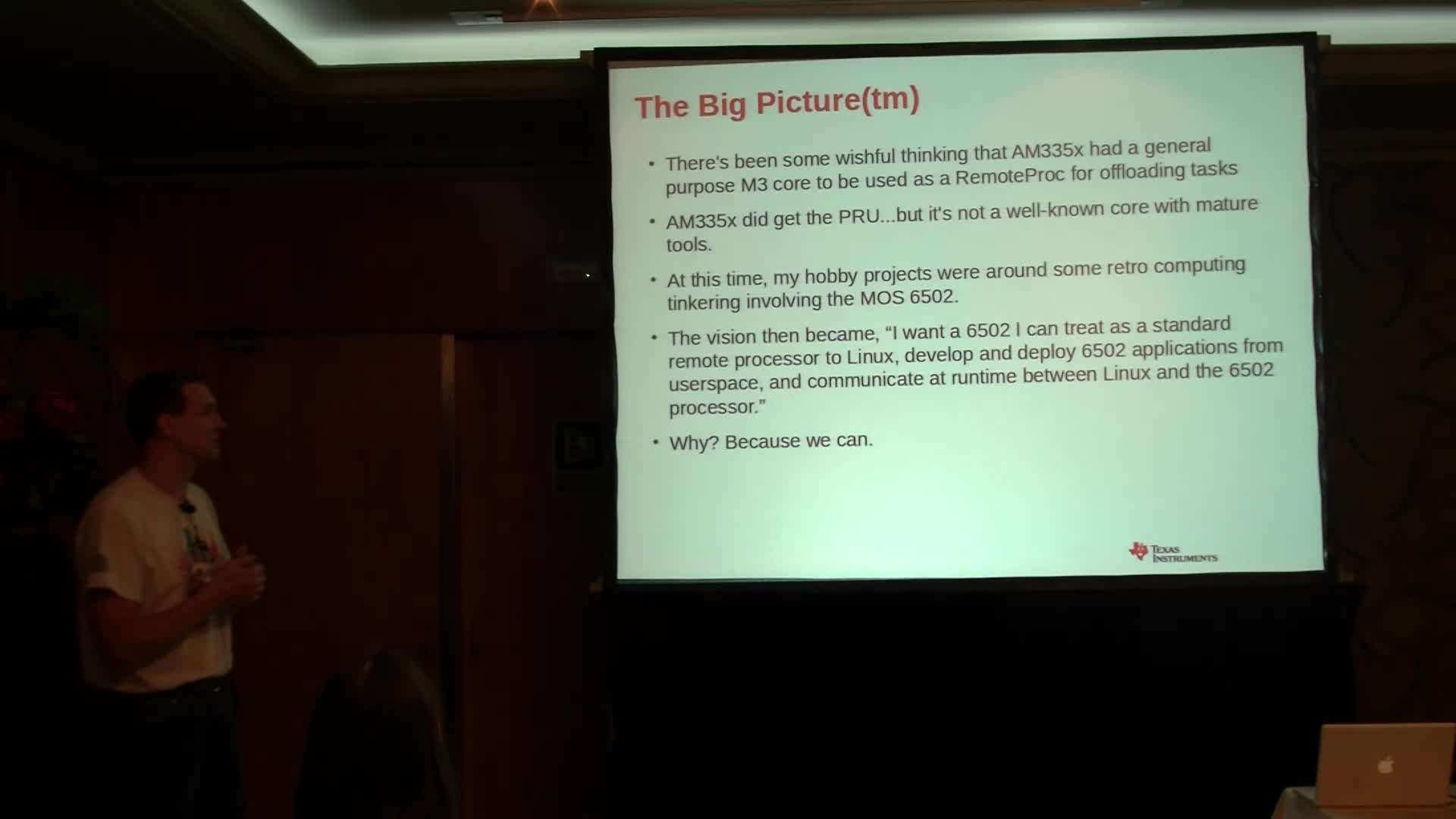
Matt Porter
Texas Instruments
What’s Old Is New: A 6502-based Remote Processor
Slides
Video (58 minutes):
full HD (389M), 800×450 (181M)
Thomas Petazzoni
Bootlin
Your New ARM SoC Linux Support Check-List
Slides
Video (56 minutes):
full HD (362M), 800×450 (150M)
Tracey M. Erway and Nithya A. Ruff
Intel and Synopsys
Can You Market an Open Source Project?
Slides
Video (43 minutes):
full HD (272M), 800×450 (103M)
Lars Knoll
Qt Project
Qt on Embedded Systems
Video (50 minutes):
full HD (337M), 800×450 (175M)
Koen Kooi
Circuitco
Supporting 200 Different Expansionboards: The Broken Promise of Devicetree
Slides
Video (37 minutes):
full HD (232M), 800×450 (102M)
Anna Dushistova
Eclipse and Embedded Linux Developers: What it Can and Cannot Do For You
Slides
Video (58 minutes):
full HD (378M), 800×450 (167M)
Dave Stewart
Intel
Yocto Project Overview and Update
Video (52 minutes):
full HD (338M), 800×450 (139M)
Vineet Gupta
Synopsys
ARC Linux: From a Tumbling Toddler to a Graduating Teen
Slides
Video (44 minutes):
full HD (269M), 800×450 (113M)
Laurent Pinchart
Ideas on Board
DRM/KMS, FB and V4L2: How to Select a Graphics and Video API
Slides
Video (48 minutes):
full HD (328M), 800×450 (145M)
Frank Rowand
Sony Network Entertainment
Practical Data Visualization
Slides
Video (46 minutes):
full HD (308M), 800×450 (141M)
Marcin Juszkiewicz
Linaro
ARM 64-Bit Bootstrapping with OpenEmbedded
Slides
Video (32 minutes):
full HD (208M), 800×450 (88M)
Wim Decroix
TPVision
Practical Experiences With Software Crash Analysis in TV
Slides
Video (35 minutes):
full HD (224M), 800×450 (87M)
Mark Brown
Wolfson Microelectronics
Regmap: The Power of Subsystems and Abstractions
Video (44 minutes):
full HD (282M), 800×450 (124M)
Hans Verkuil
Cisco Systems
Video4Linux: Current Status and Future Work
Slides
Video (33 minutes):
full HD (217M), 800×450 (100M)
Holger Behrens
Wind River
Yocto Layer for In-Vehicle Infotainment
Slides
Video (43 minutes):
full HD (284M), 800×450 (123M)
Tero Kristo
Texas Instruments
Debugging Embedded Linux (Kernel) Power Management
Slides
Video (36 minutes):
full HD (241M), 800×450 (108M)
Martin Bis
BIS
Real-Time Linux in Industrial Appliances
Slides
Video (48 minutes):
full HD (323M), 800×450 (145M)
Jens Georg
Openismus GmbH
Rygel: Open Source DLNA, ready for Customer Products?
Slides
Video (33 minutes):
full HD (215M), 800×450 (88M)
Yoshitake Kobayashi
Toshiba
Improvement of Scheduling Granularity for Deadline Scheduler
Slides
Video (31 minutes):
full HD (195M), 800×450 (82M)
Tsugikazu Shibata
NEC
LTSI (Long-Term Stable Initiative) Status Update
Slides
Video (44 minutes):
full HD (278M), 800×450 (111M)
Thomas Gleixner
Linutronix
UBI Fastmap
Slides
Video (45 minutes):
full HD (299M), 800×450 (121M)