We are just returning from Barcelona, Spain, after participating to the 2012 edition of the Embedded Linux Conference Europe. My colleague Thomas Petazzoni has delivered the below presentation:
Your New ARM SoC Linux Support Check-List
Since Linus Torvalds raised warnings about the state of the ARM architecture support in the Linux kernel, a huge amount of effort and reorganization has happened in the way Linux supports ARM SoCs. From the addition of the device tree to the pinctrl subsystem, from the new clock framework to the new rules in code organization and design, the changes have been significant over the last one and half year in theARM Linux kernel world.
Based on the speaker’s experience on getting the new Marvell Armada 370 and Armada XP SoC supported in the mainline Linux kernel, we will give an overview of those changes and summarize the new rules for ARM Linux support. We aim at helping developers willing to add suppot for new ARM SoCs in the Linux kernel by providing a check-list of things to do.
Thomas Petazzoni is an embedded Linux engineer and trainer at Bootlin since 2008. He has been involved with multiple projects around the Linux kernel, especially the mainlining of Marvell Armada 370/XP SoCs support. He is also a major contributor to the Buildroot embedded Linux build system with more than 1100 patches merged.
The presentation slides and their sources are now available here. We have also shot a video of Thomas’ talk and it should be available in the next weeks. Stay tuned!
Do not hesitate to contact us if you are looking for engineers to port Linux to new hardware.
Home based jobs in Europe or at one of our offices in France
To meet increasing demand for its Embedded Linux, kernel and Android engineering services, Bootlin is looking for developers:
With experience developing embedded Linux systems
With experience developing device drivers for the Linux kernel, and porting Linux on new hardware
With visible contributions to Free Software used in embedded systems, such as the Linux kernel, BusyBox, build systems, compilers…
With technical writing skills and an interest for training
Experience with Android low-level development, allowing to teach our Android System Development course would also be a strong advantage, though not mandatory.
A first possibility is be hired in France. Being able to join one of our offices in France (Toulouse or Orange) will be an advantage, but working from home in other parts of France will be possible too. We are also open to people living in a country with the Euro currency, working from home, and able to work as full time contractors.
We have a first opening that we would like to fill between September and December 2012. If demand continues to grow, we expect to hire more engineers with the same profile in the following months. We also hope to expand the home based jobs to countries outside Europe in the next years, but it will take a bit more time.
In a previous post, we detailed all the talks of the Embedded Systems and Open Hardware track of the Libre Software Meeting, taking place in Geneva in early July.
Bootlin will have a quite important presence at this event, with three talks and one tutorial given by Bootlin engineers. You’ll find below the descriptions of the talks given by Bootlin. Both my colleague Maxime Ripard and myself will be present at Libre Software Meeting, and we will be happy to meet you there to discuss Embedded Linux and Android topics!
A look through the Android Stack
Android has established itself in the past years as a major player in the mobile market, outperforming any other mobile systems.
To do so, Google relied both on well established open-source components, such as the Linux Kernel, and munching them together in a brand new userspace environment. This talk will detail the most important components of Android userspace and the interactions between them that allow developers to face a consistent API for their applications.
This talk will be given on Tuesday 9th July 2012, at 14:00, by Maxime Ripard, embedded Linux and Android engineer at Bootlin. Maxime is also teaching our newest training course on Android system development.
Buildroot: a nice, simple and efficient embedded Linux build system
Started in late 2001 by uClibc developers, Buildroot has grown over its 10 years history from a testing tool for the uClibc C library to a complete, vendor-neutral, embedded Linux build system. Until early 2009, the project was mostly unmaintained and the quality slowly decreased, frustrating many Buildroot users. Fortunately, since early 2009, Peter Korsgaard took over the maintainership of Buildroot, and the project has considerably evolved since then: stable releases are published every three months, the user and developer community has grown significantly, the existing features have been cleaned up, many other new features have been added, the project is no longer uClibc-specific and the quality has been vastly improved. Buildroot now offers a nice, simple and efficient mechanism to build small to medium sized embedded Linux systems, such as the ones found in many industrial systems or highly dedicated systems. Many users are amazed about how easy it is to get started with Buildroot, especially compared to other build systems. This presentation will show how Buildroot can be used to build embedded Linux systems, highlighting the new features and improvements made over the last few years, and detailing how the simplicity of Buildroot allows you to focus on developing the applications for your system. A quick overview of the future Buildroot developments will also be provided.
This talk will take place on Wednesday 10th July at 17:00 and will be given by Thomas Petazzoni, embedded Linux engineer at Bootlin, and long time Buildroot contributor.
Linux kernel on ARM: consolidation work
In Spring 2011, Linus Torvalds asked the ARM Linux maintainers to clean up the contents of arch/arm/ in the Linux kernel code by doing more consolidation between ARM sub-architectures.
More than a year later, a lot of work has been accomplished in this area, especially thanks to the introduction of the device tree for the ARM architecture, the pinctrl subsystem and the clock framework into the Linux kernel.
Through this talk, we will present the challenges the ARM architecture creates in terms of Linux kernel support, and then describe from a technical point of view how the device tree, the pinctrl subsystem and the clock subsystem work and how they can improve the consolidation between different ARM sub-architectures.
The talk will be designed to be accessible to an audience having only a moderate knowledge of kernel programming and internals, and will therefore provide enough context for such audience to understand the issues that those different mechanisms are striving to solve.
This talk will take place on Thursday 11th July at 10:00 and will be given by Thomas Petazzoni, embedded Linux engineer at Bootlin.
Tutorial on using Buildroot, a nice, simple and efficient embedded Linux build system
Started in late 2001 by uClibc developers, Buildroot has grown over its 10 years history from a testing tool for the uClibc C library to a complete, vendor-neutral, embedded Linux build system. Until early 2009, the project was mostly unmaintained and the quality slowly decreased, frustrating many Buildroot users. Fortunately, since early 2009, Peter Korsgaard took over the maintainership of Buildroot, and the project has considerably evolved since then: stable releases are published every three months, the user and developer community has grown significantly, the existing features have been cleaned up, many other new features have been added, the project is no longer uClibc-specific and the quality has been vastly improved. Buildroot now offers a nice, simple and efficient mechanism to build small to medium sized embedded Linux systems, such as the ones found in many industrial systems or highly dedicated systems. Many users are amazed about how easy it is to get started with Buildroot, especially compared to other build systems.
This workshop follows the Buildroot presentation proposed in the same topic. During one half-day participants will be introduced on how to efficiently use Buildroot for their own projects:
Basic usage of Buildroot: generate the first system, boot it on a hardware platform
Add packages to Buildroot
Customize Buildroot for real-life projects: how to integrate project specific patches, configuration and customization
Participants are invited to come with their own laptop, installed with a sufficiently recent GNU/Linux distribution. Participants are recommended to attend the Buildroot talk by the same speaker before attending the workshop, as the talk will give an overall introduction on Buildroot.
This tutorial will take place on Thursday 11th July from 14:00 to 17:00 and will be given by Thomas Petazzoni, embedded Linux engineer at Bootlin, and long time Buildroot contributor.
The Libre Software Meeting is a community-driven free software event that exists since 2000, composed of talks and workshops. Its 2012 edition will take place from July 7th to July 12th in Geneva, Switzerland.
In the context of this conference, I was responsible with Florian Fainelli from the OpenWRT project to organize the Embedded systems and open hardware track. This track will offer an interesting selection of talks related to embedded topics, concentrated between July 9th and July 11th:
Make a free camera fly with free hardware, Éric Boudrand. It will be the only talk of the track that will take place in French. The rest of the track contents will be in English.
Bootlin is looking for a embedded Linux and kernel engineer in the area of Nice in France (on the French Riviera). The contract will be home based, but will also involve working at customer locations in the same area, possibly for long periods of time.
A detailed job description is available on our careers page.
For this particular job opening, we absolutely need someone with prior experience with kernel and driver development, and contributions to the official Linux kernel sources will be a strong advantage. This is because a customer of ours is looking for an engineer to develop new drivers and port the Linux kernel to pre-silicon and silicon platforms.
Once we find a candidate with the expected skills and profile, and once the customer agrees to contract this person for this initial project, the engineer will be hired by Bootlin under a permanent contract, and will work on the customer site for at least 6 months.
Once the initial assignment is over, our engineer will continue to work on projects for other Bootlin customers, and will also give embedded Linux and kernel training sessions to customers throughout the world.
Note that this position is open to people who do not speak French, but are ready to settle in the French Riviera and to be hired through a French contract.
If you are interested in this position, see our job description for details about how to apply.
The 2012 edition of the Embedded Linux Conference took place on February 15-17th 2012 at Redwood Shores near San Francisco in California. Three engineers of Bootlin attended this conference, and we reported every day our impressions about the talks, see our blog posts for day 1, day 2 and day 3. We have now taken the time to encode all the videos we have recorded during this event, and are proud to distribute them today.
It is worth noting that for the first time, the Linux Foundation was also recording videos of the talks, the Linux Foundation videos are available from video.linux.com, and we included links to these videos below for the different talks.
We hope that those of you who couldn’t attend the conference will enjoy those videos, with many great talks on technical embedded Linux topics.
Loïc Pallardy Saving the Power Consumption of the Unused Memory Slides Bootlin video (46 minutes): full HD (378M), 450×800 (125M)
Bernhard Rosenkränzer Linaro What Android and Embedded Linux Can Learn From Each Other Slides Linux Foundation video Bootlin video (40 minutes): full HD (370M), 450×800 (129M)
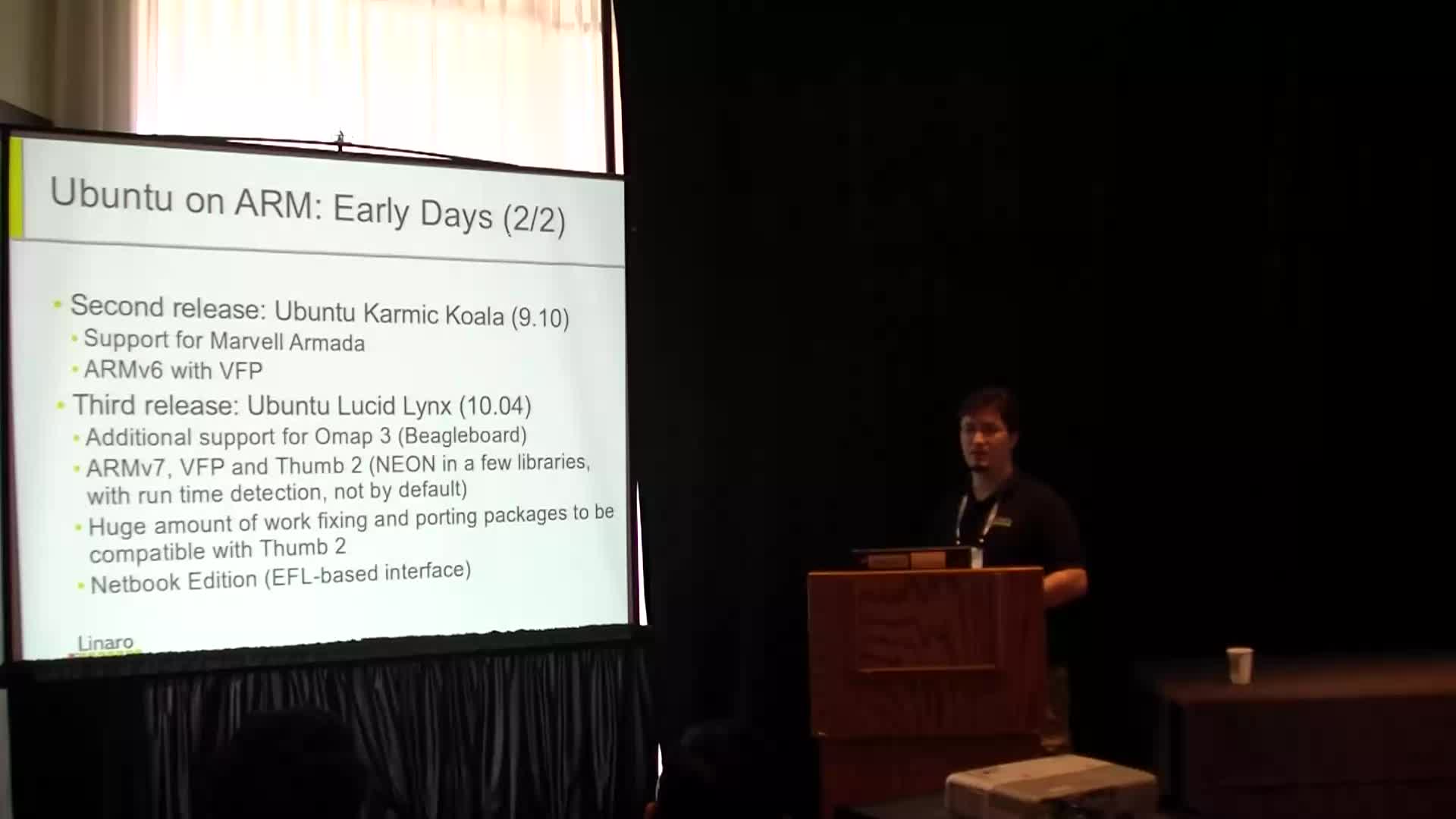
Ricardo Salveti de Araujo Linaro Ubuntu on ARM: Improvements and Optimizations Done By Linaro Slides Linux Foundation video Bootlin video (46 minutes): full HD (301M), 450×800 (140M)
Sean Hudson Mentor Graphics, Inc. Embedded Linux Pitfalls Slides Bootlin video (51 minutes): full HD (483M), 450×800 (176M)
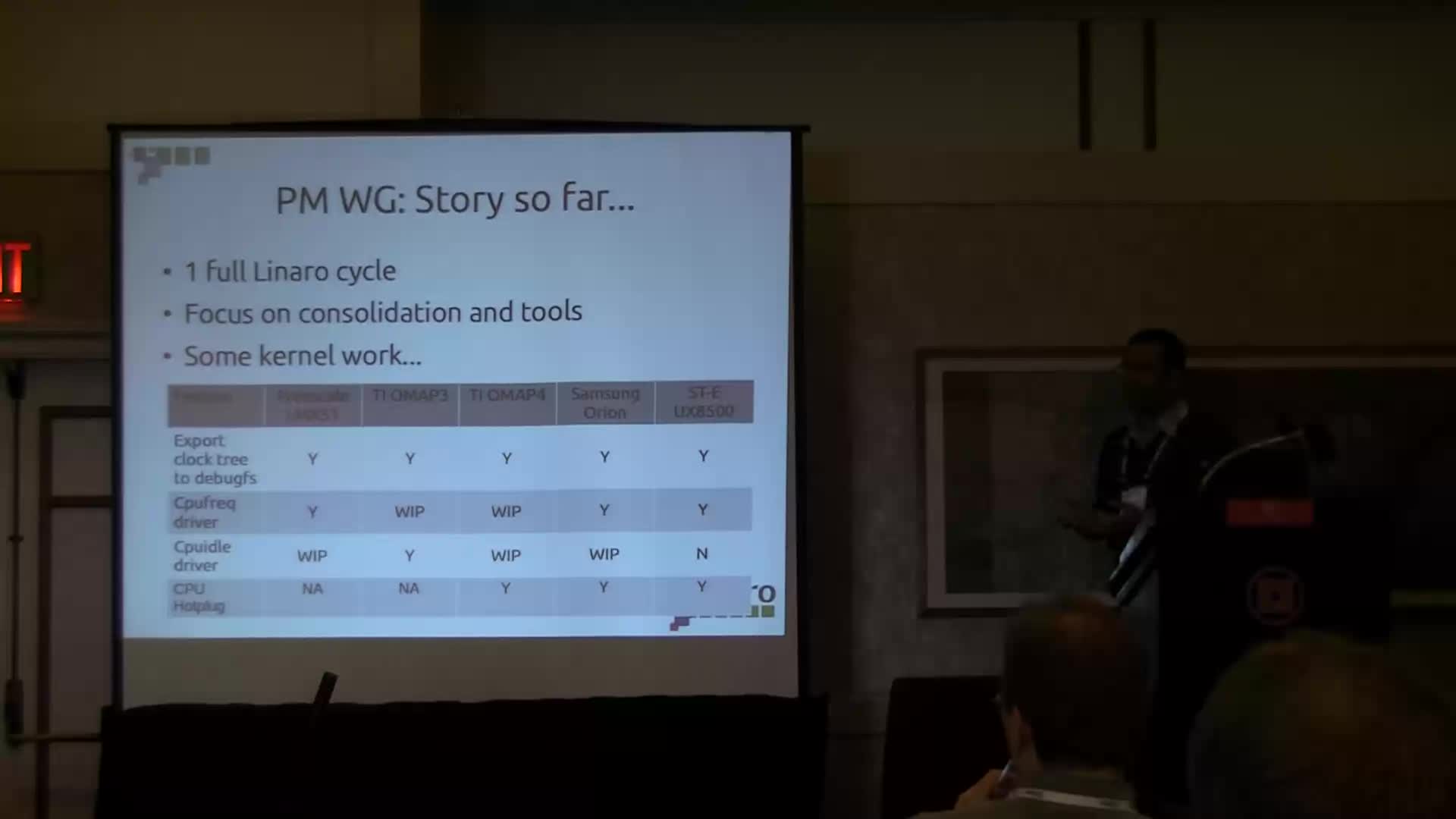
Vincent Guittot Linaro Comparing Power Saving Techniques For Multicore ARM Platforms Slides Linux Foundation video Bootlin video (57 minutes): full HD (307M), 450×800 (154M)
Bruce Ashfield Wind River A View From the Trenches: Embedded Functionality and How It Impacts Multi-Arch Kernel Maintenance Slides Bootlin video (54 minutes): full HD (741M), 450×800 (222M)
Matt Porter Texas Instruments Passing Time With SPI Framebuffer Driver Slides
Bootlin video (54 minutes): full HD (565M), 450×800 (172M)
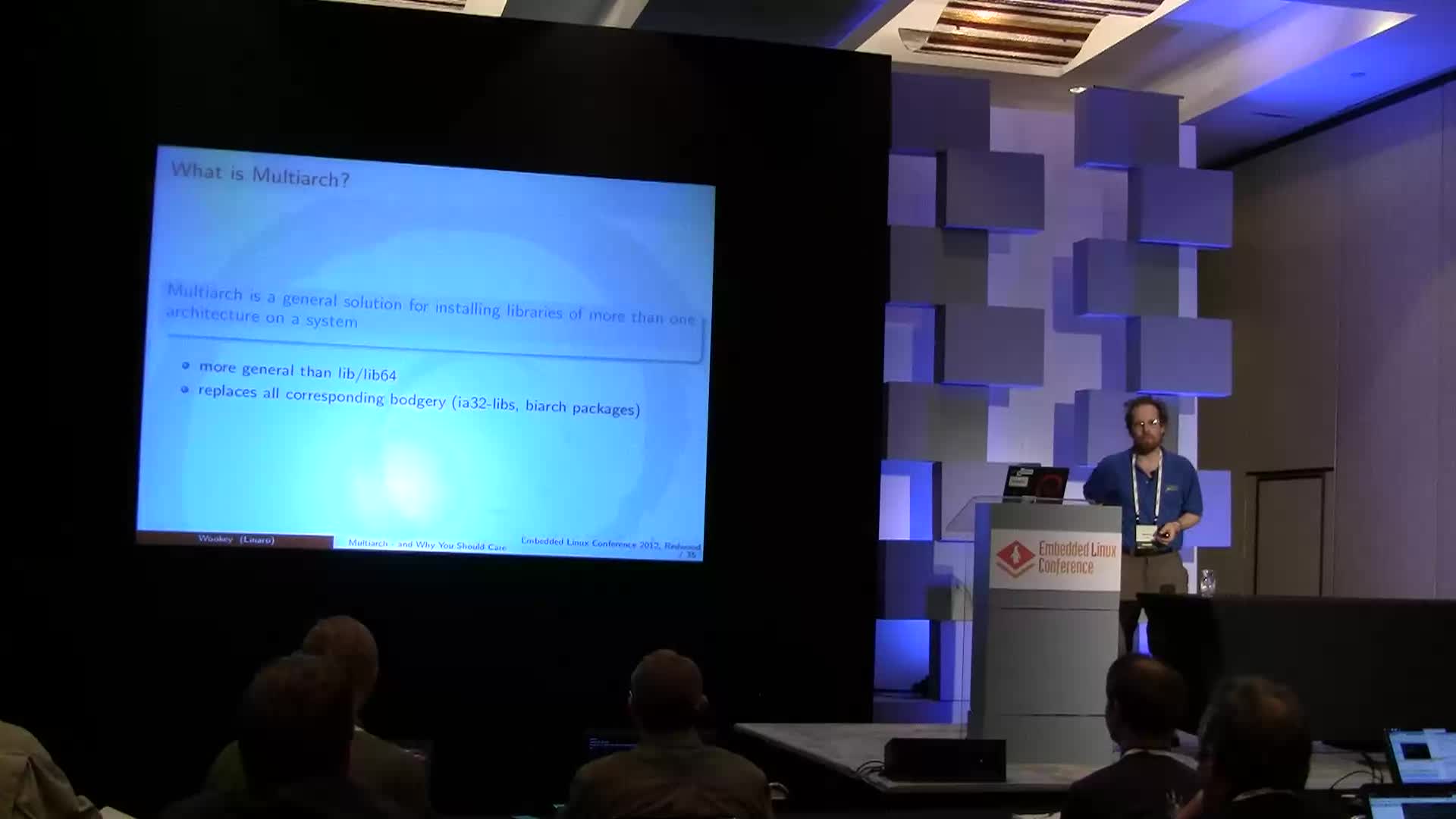
Wookey Linaro Multiarch and Why You Should Care: Running, Installing and Crossbuilding With Multiple Architectures Slides Bootlin video (42 minutes): full HD (453M), 450×800 (143M)
Amit Daniel Kachhap Linaro/Samsung A New Simplified Thermal Framework For ARM Platforms Slides Linux Foundation video Bootlin video (41 minutes): full HD (226M), 450×800 (115M)
Tsugikazu Shibata NEC On The Road: To Provide the Long-Term Stable Linux For The Industry Slides Linux Foundation video Bootlin video (32 minutes): full HD (304M), 450×800 (95M)
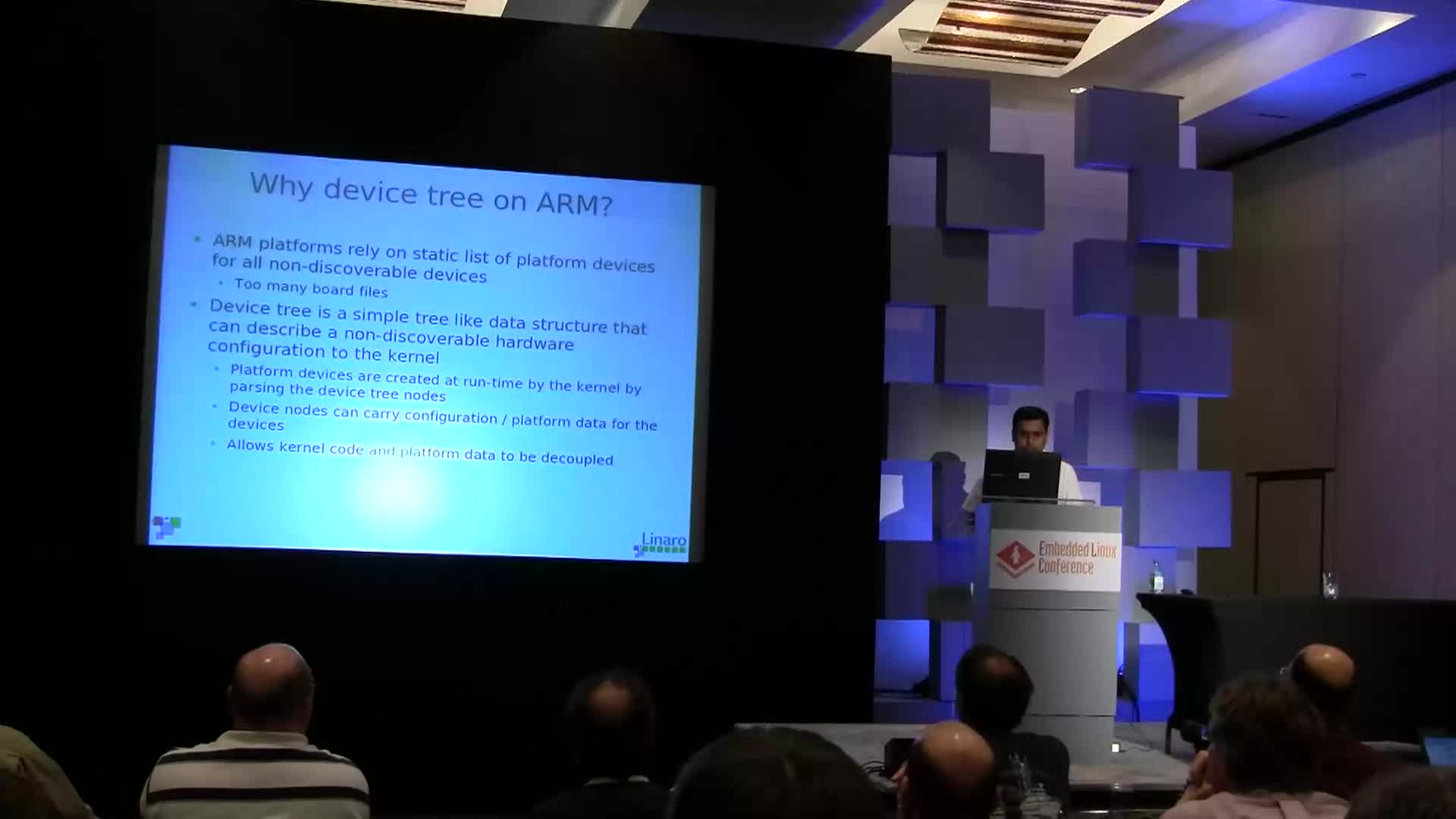
Thomas P. Abraham Samsung Electronics Experiences With Device Tree Support Development For ARM-Based SOC’s Slides Bootlin video (44 minutes): full HD (509M), 450×800 (155M)
Thomas Petazzoni Bootlin Buildroot: A Nice, Simple, and Efficient Embedded Linux Build System Slides Linux Foundation video Bootlin video (56 minutes): full HD (594M), 450×800 (182M)
Edward Hervey Collabora GStreamer 1.0: No Longer Compromise Flexibility For Performance Slides Linux Foundation video Bootlin video (49 minutes): full HD (540M), 450×800 (174M)
Tim Bird Sony Network Entertainment Embedded-Appropriate Crash Handling in Linux Slides Linux Foundation video Bootlin video (49 minutes): full HD (292M), 450×800 (142M)
Mark Gisi Wind River Systems The Power of SPDX – Sharing Critical Licensing Information Within a Linux Device Supply Chain Linux Foundation video Bootlin video (49 minutes): full HD (498M), 450×800 (164M)
Yoshitake Kobayashi Toshiba Ineffective and Effective Ways To Find Out Latency Bottlenecks With Ftrace Slides Linux Foundation video Bootlin video (37 minutes): full HD (251M), 450×800 (108M)
Ohad Ben-Cohen Wizery / Texas Instruments Using virtio to Talk With Remote Processors Slides Linux Foundation video Bootlin video (54 minutes): full HD (582M), 450×800 (182M)
Elizabeth Flanagan Intel Embedded License Compliance Patterns and Antipatterns Linux Foundation video Bootlin video (44 minutes): full HD (391M), 450×800 (144M)
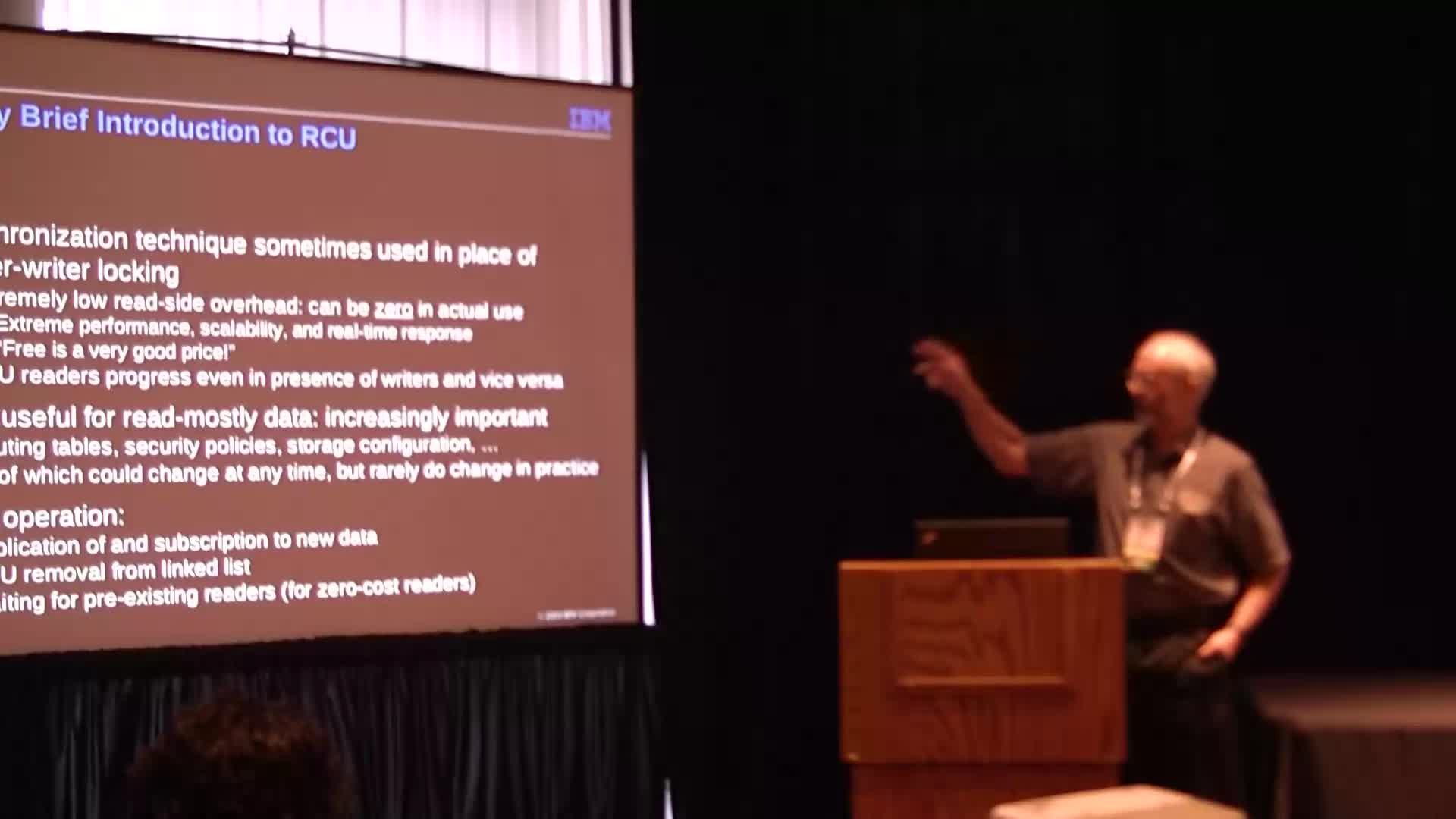
Frank Rowand Sony Network Entertainment Real Time (BoFs) Slides Bootlin video (77 minutes): full HD (924M), 450×800 (288M)
Mike Turquette Texas Instruments Common Clock Framework (BoFs) Slides Bootlin video (53 minutes): full HD (333M), 450×800 (148M)
Hunyue Yau HY Research LLC Userland Tools and Techniques For Linux Board Bring-Up and Systems Integration Slides Linux Foundation video Bootlin video (51 minutes): full HD (407M), 450×800 (136M)
Koen Kooi The Angstrom Distribution Producing the Beaglebone and Supporting It Linux Foundation video Bootlin video (42 minutes): full HD (398M), 450×800 (126M)
One week after the end of the Embedded Linux Conference Europe 2011, we are pleased to release the videos of all talks that took place during this event. We would like to thank the Linux Foundation for allowing us to record those talks and to share freely the resulting videos on-line, and also thank the Clarion Congress Hotel technical staff for helping us with technical details related to video recording.
Below, you’ll find 51 videos, in both a 1920×1080 HD format and a reduced 800×450 format. In total, it represents 28 GB of video, for a duration of 2214 minutes, that is more of 36 hours of video. We hope that you will enjoy those videos and that these will be useful to those who couldn’t attend the conference.
Linus Torvalds, Alan Cox, Thomas Gleixner, Paul McKenney moderated by Lennart Poettering Kernel Developer Panel Video (55 minutes): full HD (622M), 450×800 (191M)
Zach Pfeffer Linaro Linaro’s Android Platform Video (45 minutes): full HD (604M), 450×800 (164M)
Thomas Gleixner Linutronix State of PREEMPT_RT Video (46 minutes): full HD (374M), 450×800 (147M)
Jessica Zhang Intel The Yocto Project Eclipse plug-in: An effective IDE environment for both Embedded Application and System developers Video (45 minutes): full HD (431M), 450×800 (118M)
Satoru Ueda Sony Corporation / Japan OSS Promotion Forum Contributing to the Community? Does your Manager Support You? Video (42 minutes): full HD (556M), 450×800 (140M)
Benjamin Zores Alcatel-Lucent Embedded Linux Optimization Techniques: How Not To Be Slow Slides Video (44 minutes): full HD (328M), 450×800 (125M)
Ohad Ben-Cohen Texas Instruments Remote Processor Messaging Slides Video (48 minutes): full HD (433M), 450×800 (131M)
Jeff Osier-Mixon Intel Collaborative Initiatives in Embedded Linux Video (26 minutes): full HD (266M), 450×800 (73M)
Karim Yaghmour Opersys Inc. Leveraging Android’s Linux Heritage Video (51 minutes): full HD (419M), 450×800 (168M)
Pierre Tardy Intel Using pytimechart For Real World Analysis Slides Video (51 minutes): full HD (495M), 450×800 (132M)
Arnd Bergmann Linaro Optimizations for Cheap Flash Media Video (44 minutes): full HD (524M), 450×800 (146M)
Vitaly Wool Sony Ericsson Saving Power with Wi-Fi: How to Prolong Your Battery Life and Still Stay Connected Slides Video (50 minutes): full HD (371M), 450×800 (143M)
David Stewart Intel Developing Embedded Linux Devices Using the Yocto Project and What’s new in 1.1 Slides Video (47 minutes): full HD (370M), 450×800 (124M)
Tetsuyuki Kobayashi Kyoto Micro Computer Android is NOT Just “Java on Linux” Slides Video (37 minutes): full HD (542M), 450×800 (129M)
Thomas Petazzoni Bootlin Using Buildroot For a Real Project Slides Video (55 minutes): full HD (408M), 450×800 (156M)
Tim Bird Sony Network Entertainment Status of Embedded Linux BoFs Slides Video (60 minutes): full HD (877M), 450×800 (213M)
Lauro Ramos Venancio and Samuel Ortiz Instituto Nokia de Tecnologia, Intel The Linux NFC Subsystem Slides Video (31 minutes): full HD (229M), 450×800 (87M)
David Anders Texas Instruments Board Bringup: LCD and Display Interfaces Slides Video (39 minutes): full HD (242M), 450×800 (98M)
Antti Aumo President of Global Solutions at Ixonos Re-Defining the Cloud Phone Video (32 minutes): full HD (360M), 450×800 (108M)
Dirk Hohndel Chief Linux and Open Source Technologist at Intel Reflection on 20 Years of Linux Video (30 minutes): full HD (235M), 450×800 (92M)
Grant Likely Secret Lab Device Tree Status Report Video (51 minutes): full HD (775M), 450×800 (178M)
Laurent Pinchart Ideas on Board Success Story of the Open-Source Camera Stack: The Nokia N9 Case Slides Video (48 minutes): full HD (308M), 450×800 (120M)
Avinash Mahadeva and Vishwanth Sripathy Texas Instuments SOC Power Management – Debugging and Optimization Techniques Video (41 minutes): full HD (288M), 450×800 (108M)
Rafael J. Wysocki Faculty of Physics, U. Warsaw / SUSE Labs Power Management Using PM Domains on SH7372 Slides Video (46 minutes): full HD (692M), 450×800 (157M)
Sascha Hauer Pengutronix e.K. A Generic Clock Framework in the Kernel: Why We Need It and Why We Still Don’t Have It Video (45 minutes): full HD (345M), 450×800 (134M)
Ruud Derwig Synopsys Android Platform Optimizations Slides Video (43 minutes): full HD (266M), 450×800 (105M)
Inki Dae Samsung Electronics DRM Driver Development For Embedded Systems Slides Video (22 minutes): full HD (367M), 450×800 (91M)
Lorenzo Pieralisi ARM Ltd. Consolidating Linux Power Management on ARM Multiprocessor Systems Slides Video (46 minutes): full HD (283M), 450×800 (113M)
Thomas Petazzoni Bootlin Using Qt For Non-Graphical Applications Slides Video (49 minutes): full HD (340M), 450×800 (124M)
Marek Szyprowski and Kyungmin Park Samsung Electronics ARM DMA-Mapping Framework Redesign and IOMMU Integration Slides Video (49 minutes): full HD (790M), 450×800 (195M)
Keerthyd Jagadeesh and Vishwanath Sripathy Texas Instruments Thermal Framework for ARM based SOCs Video (42 minutes): full HD (316M), 450×800 (113M)
Marc Titinger ST Microelectronics Efficient JTAG-Based Linux Kernel Debugging Slides Video (57 minutes): full HD (382M), 450×800 (141M)
Tsugikazu Shibata NEC and Linux Foundation Board Member Toward the Long Term Stable Kernel tree for The Embedded Industry Video (32 minutes): full HD (606M), 450×800 (145M)
Lisko Lappalainen MontaVista Software Secure Virtualization in Automotive Video (40 minutes): full HD (301M), 450×800 (116M)
Jeff Osier-Mixon Intel Yocto Project Community BoFs Video (60 minutes): full HD (451M), 450×800 (167M)
Jon Corbet Editor at LWN.net The Kernel Report: 20th Anniversary Edition Video (28 minutes): full HD (218M), 450×800 (88M)
Wim Coekaerts Senior Vice President, Linux and Virtualization Engineering at Oracle Engineered Systems With Linux Video (21 minutes): full HD (175M), 450×800 (68M)
Andrea Gallo ST-Ericsson ARM Linux Kernel Alignment and Benefits For Snowball Slides Video (47 minutes): full HD (394M), 450×800 (133M)
Liam Girdwood and Peter Ujfalusi Texas Instruments Smart Audio: Next-Generation ASoC For Smart Phones Video (50 minutes): full HD (367M), 450×800 (124M)
Pawel Moll ARM Ltd. Linux on Non-Existing SoCs Video (52 minutes): full HD (483M), 450×800 (143M)
Koen Kooi The Angstrom Distribution Integrating systemd: Booting Userspace in Less Than 1 Second Slides Video (44 minutes): full HD (343M), 450×800 (125M)
Sylvain Leroy and Philippe Thierry Grsecurity in Embedded Linux Used in Android Operating System Slides Video (40 minutes): full HD (384M), 450×800 (110M)
MyungJoo Ham Samsung Electronics Charger Manager: Aggregating Chargers, Fuel-Gauges and Batteries Slides Video (33 minutes): full HD (434M), 450×800 (109M)
Arnd Bergmann Linaro News From the ARM Architecture Video (49 minutes): full HD (421M), 450×800 (150M)
Frank Rowand Sony Network Entertainment How Linux PREEMPT_RT Works Slides Video (45 minutes): full HD (378M), 450×800 (135M)
Catalin Marinas ARM Ltd. Linux Support for the ARM Large Physical Address Extensions Slides Video (52 minutes): full HD (594M), 450×800 (170M)
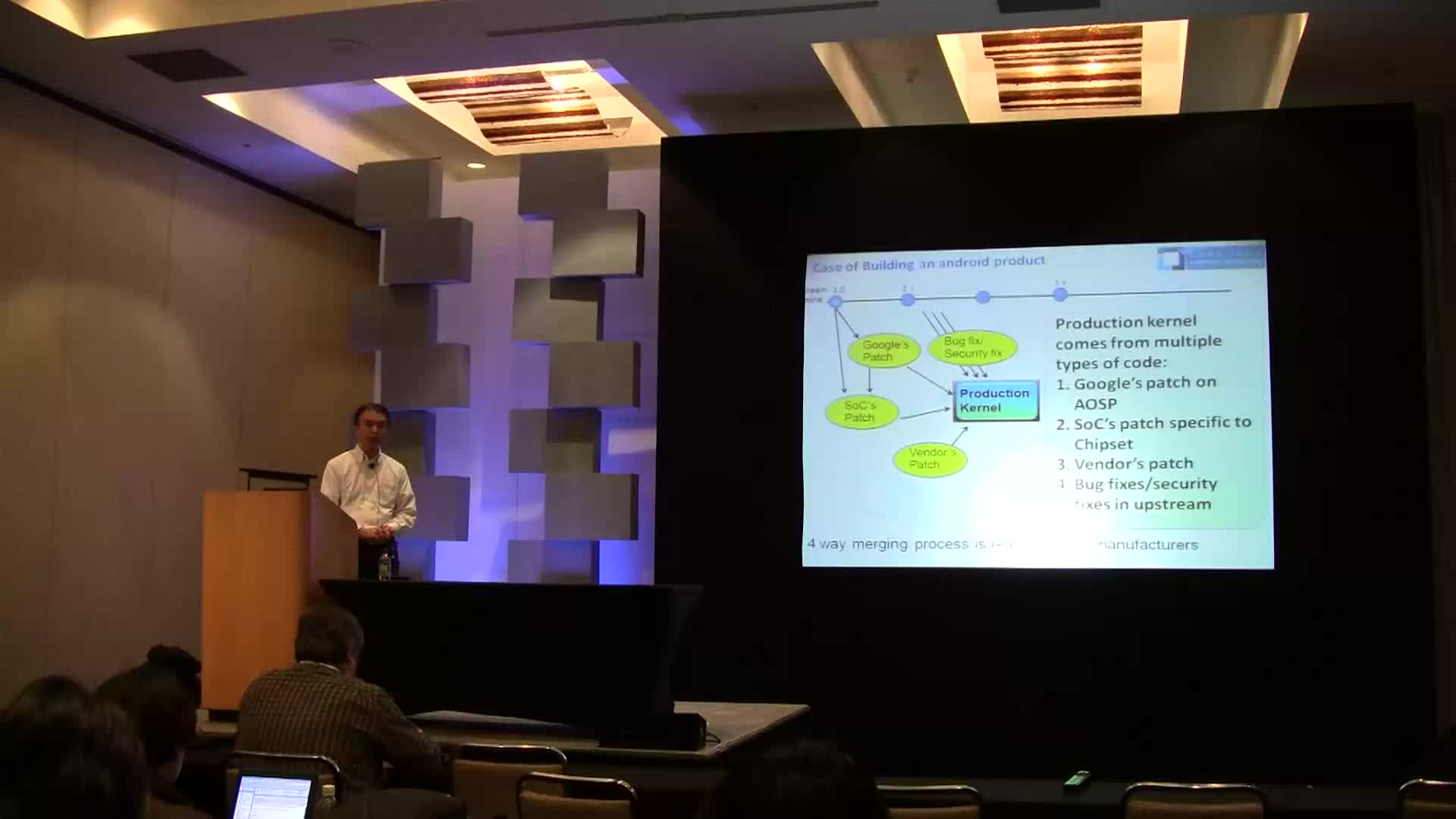
Jim Huang 0xlab Build Community Android Distribution and Ensure the Quality Video (44 minutes): full HD (472M), 450×800 (143M)
Till Jaeger JBB Rechtsanwälte The Case AVM v. Cybits: The GPL and Embedded Systems Video (42 minutes): full HD (362M), 450×800 (124M)
Darren Hart Intel Tuning Linux For Embedded Systems: When Less is More Slides Video (45 minutes): full HD (482M), 450×800 (135M)
Wolfram Sang Pengutronix e.K. Developer’s Diary: It’s About Time Video (49 minutes): full HD (482M), 450×800 (141M)
Since early 2009, our training sessions have been using the USB-A9263 board from Calao Systems as the hardware platform for the practical labs. However, this AT91-based platform was getting older, and we therefore started the process of switching our training sessions to a new hardware platform, the IGEPv2 board from ISEE.
IGEPv2 board
The IGEPv2 platform is very similar to the popular BeagleBoard and BeagleBoard-XM platforms, and has the following technical characteristics :
TI DM3730, which is the latest OMAP3 processor from Texas Instruments, clocked at 1 Ghz, and including a DSP for signal processing, an IVA block for audio/video decoding and the PowerVR SGX for 3D/OpenGL. This processor offers far more possibilities than the AT91 one, especially for multimedia applications.
512 MB of RAM and 512 MB of OneNAND flash.
Integrated Ethernet connector, Wifi and Bluetooth connectivity.
One USB OTG port and one USB host port.
A microSD connector.
A DVI-D connector (HDMI), stereo input and ouput
RS232 connector
Multiple expansion ports to access LCD, camera, I2C, SPI, JTAG, etc. signals
Compared to the BeagleBoard-XM, this board has the following advantages:
it has a OneNAND Flash device, which allows us to demonstrate and practice the usage of MTD and Linux flash-specific filesystems such as JFFS2 and UBIFS in our training sessions. Even though block-based storage such as SD and eMMC is more and more popular in consumer-electronic devices, usage of raw NAND flash is still very common in industrial applications, and we therefore wanted to keep presenting those devices and their usage in embedded Linux
ISEE, the company manufacturing the IGEPv2, is located in Spain, which makes it easier for us to regularly order boards from them, since we are also located in Europe
the board provides Bluetooth and Wifi connectivity, which is nice
We have already given two sessions of our Embedded Linux system development training with the IGEPv2, and all our future sessions of this training will use this hardware platform, so the participants will benefit from a more modern platform, with far more capabilities than our previous AT91-based training hardware. This is also the board we are now giving to the participants to our public training sessions, so those participants come back home with a very nice and powerful platform which allows countless experiments around embedded Linux. Note that we also intend to port our Embedded Linux kernel and driver development training session to the IGEPv2 platform in the near future.
The Embedded Linux Conference 2011 took place between April, 11th and April, 13th in its now usual place, the Kabuki hotel in San Francisco, California. It was the first edition organized since the merge of the CE Linux Forum into the Linux Foundation. During three days, three parallel tracks of talks and BoFs about technical topics around embedded Linux : kernel support, power management, build systems, file systems, real-time, and more.
As usual, part of the Bootlin team was at this Embedded Linux Conference, in order to keep up with the latest developments from the embedded Linux community. Gregory Clement (left on the picture), Maxime Ripard (right on the picture) and myself (center on the picture) were present, and we recorded all talks of the conference. And just a little bit more than one month later, we are ready to announce that all videos are now available online, in 1080p high-definition, and in a lower 450p resolution, encoded with the new VP8 codec.
Bootlin at ELC 2011. From left to right: Gregory Clement, Thomas Petazzoni and Maxime Ripard.
Amongst all the conferences below, each of us have selected the three ones we thought were the most interesting ones (note that the top three for each us is necessarily composed of distinct talks, as none of us have seen the same talks since we had to record talks from three different sessions in parallel) :
For Gregory Clement, the top three is: Yoshiya Hirase talk about Faster Resume For More Energy Savings on MeeGo, Arnd Bergmann talk about Optimizations For Cheap Flash Media (which follows Arnd article on the same topic in LWN) and a set of three related talks about the video infrastructure in the Linux kernel, that Gregory recommends to watch in this order: Media Controller Framework (MCF) For OMAP2+ Display Subsystem (Sumit Semwal), Video4linux: Progress, New videobuf2 Framework and the Future (Hans Verkuil) and Bringing up HDMI Display for OMAP4 Panda Board – Design, Challenges and Lessons Learned (Mythri pk).
For Maxime Ripard, the top three is: John Stultz talk about Android for servers, Mike Anderson talks about ARM NEON and GPU programming, Wolfram Sang talk about Helping the process
For myself, the top three is: Jesse Barker talks about the ARM Graphics ecosystem which gives a nice overview of the state of this topic, Hai Shalom talk about PCD (which is an original and interesting replacement for init), Dave Stewart talk about The Yocto Project and its Application Development Toolkit (because it gives details on how Yocto is supposed to be used for application development, a topic I’m interested in as a Buildroot developer)
It is also worth noting that this Embedded Linux Conference was co-located with the first edition of the Android Builders Summit, for which we will soon publish videos as well. The next embedded Linux conference will take place in Europe, in Prague from October 26th to 28th, co-located with the first edition of LinuxCon Europe and just after the Kernel Summit. Prague will really be full of Linux developers during this end of October, it’s time to book this week on your agenda as well !
Finally, the list of all videos of Embedded Linux Conference 2011, along with their corresponding slides :
Tim Bird Sony Network Entertainment Welcome Keynote Video (10 minutes): full HD (131M), 450×800 (43M)
Dirk Hohndel, Richard Purdie Intel, Linux Foundation The Yocto Project Video (35 minutes): full HD (458M), 450×800 (140M)
Keshava Munegowda Texas Instruments Power Fail Safe FAT File Systems Slides Video (48 minutes): full HD (693M), 450×800 (203M)
Frank Rowand Sony Identifying embedded real-time issues: I-cache and locks Slides Video (46 minutes): full HD (471M), 450×800 (147M)
Bruno Cardoso Lopes University of Campinas LLVM, Clang and Embedded Linux Systems Slides Video (50 minutes): full HD (593M), 450×800 (164M)
Steven Rostedt RedHat Kernel Shark Tutorial Video (49 minutes): full HD (743M), 450×800 (215M)
Kang Dongwook ETRI Snapshoot Booting on Embedded Linux Slides Video (33 minutes): full HD (284M), 450×800 (95M)
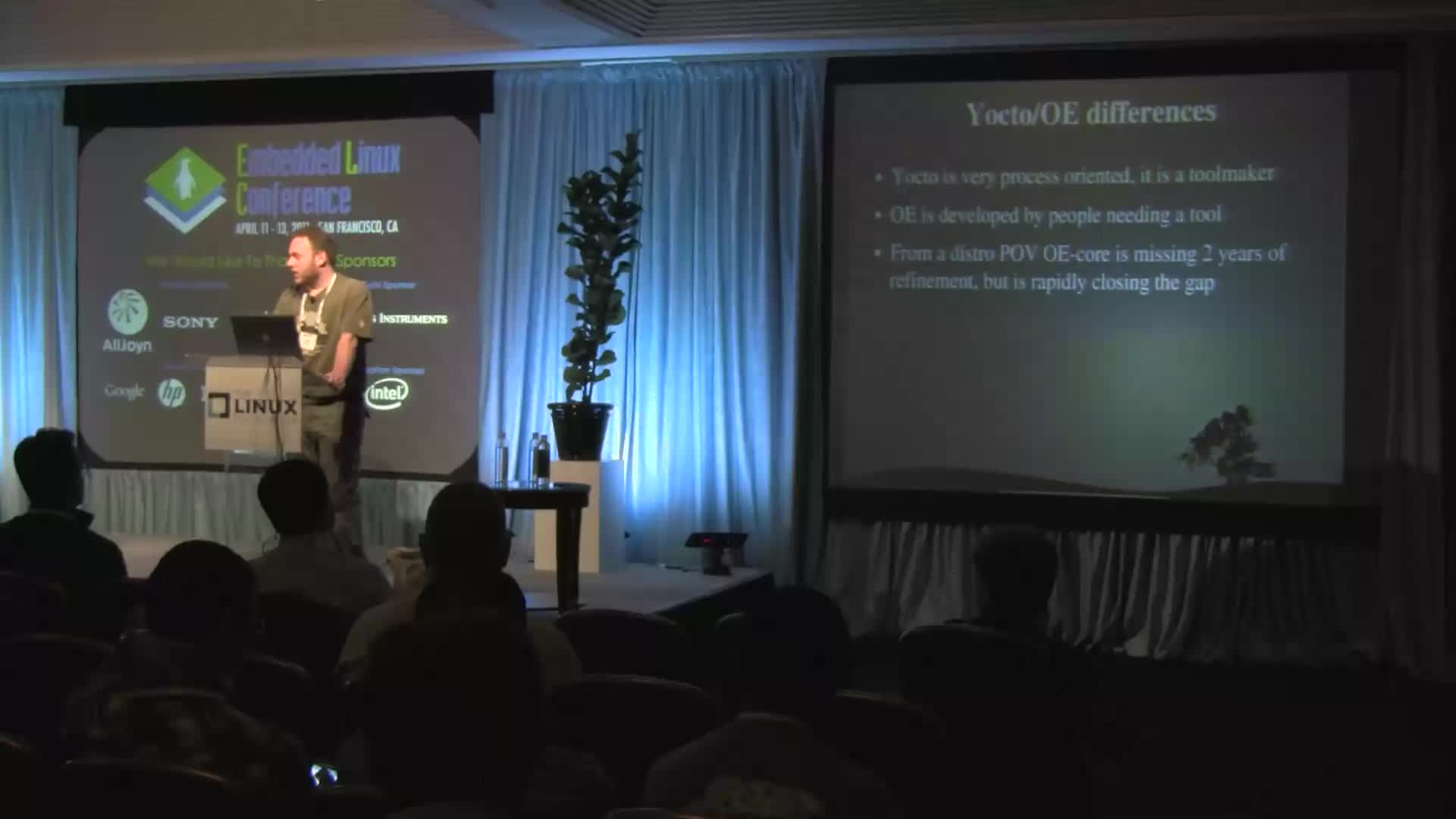
Khem Raj State of OpenEmbedded Internal Toolchain and SDKs Slides Video (41 minutes): full HD (289M), 450×800 (119M)
David Rusling Linaro Linaro: a year of change Slides Video (50 minutes): full HD (529M), 450×800 (173M)
Hai Shalom Atheros Control, recover and debug your embedded product with PCD Slides Video (50 minutes): full HD (470M), 450×800 (160M)
Gene Sally Zigbee Networking and Linux Video (53 minutes): full HD (262M), 450×800 (139M)
Xi Wang Broadcom Solving real-time scheduling problems with RT_PREEMPT and deadline-based scheduler Slides Video (43 minutes): full HD (422M), 450×800 (141M)
Mike Anderson The PTR Group ARM Neon instruction set and why you should care Slides Video (53 minutes): full HD (527M), 450×800 (169M)
Darren Hart Intel Yocto Project: Practical Kernel Development Tutorial Video (52 minutes): full HD (551M), 450×800 (196M)
Arnd Bergmann IBM Optimizations for cheap flash media Slides Video (49 minutes): full HD (482M), 450×800 (160M)
Wolfram Sang Pengutronix Developer’s diary: helping the process Slides Video (39 minutes): full HD (315M), 450×800 (112M)
Rajesh Lal Nokia Fun with QML and Javascript Slides Video (39 minutes): full HD (250M), 450×800 (108M)
Thomas Gleixner Linutronix RT-Preempt: what’s the state and why there is no roadmap Slides Video (46 minutes): full HD (447M), 450×800 (149M)
Jason Kridner Texas Instruments High-level web interface to low-level I/O on the BeagleBoard Slides Video (36 minutes): full HD (370M), 450×800 (115M)
Arnd Bergmann IBM Becoming part of the Linux kernel community Slides Video (34 minutes): full HD (376M), 450×800 (126M)
Paul Mundt Renesas Working with hardIRQs: life beyond static IRQ assignments Slides Video (36 minutes): full HD (330M), 450×800 (113M)
Amit Kucheria Linaro Powerdebugging inside Linaro Slides Video (46 minutes): full HD (309M), 450×800 (136M)
Mike Anderson The PTR Group High-performance computing using GPUs Slides Video (57 minutes): full HD (615M), 450×800 (185M)
Paul Larson Canonical Linaro automated validation on ARM Video (51 minutes): full HD (581M), 450×800 (184M)
Dave Stewart Intel The Yocto project and its application development toolkit (ADT) – The answer to effective embedded application development Video (42 minutes): full HD (362M), 450×800 (139M)
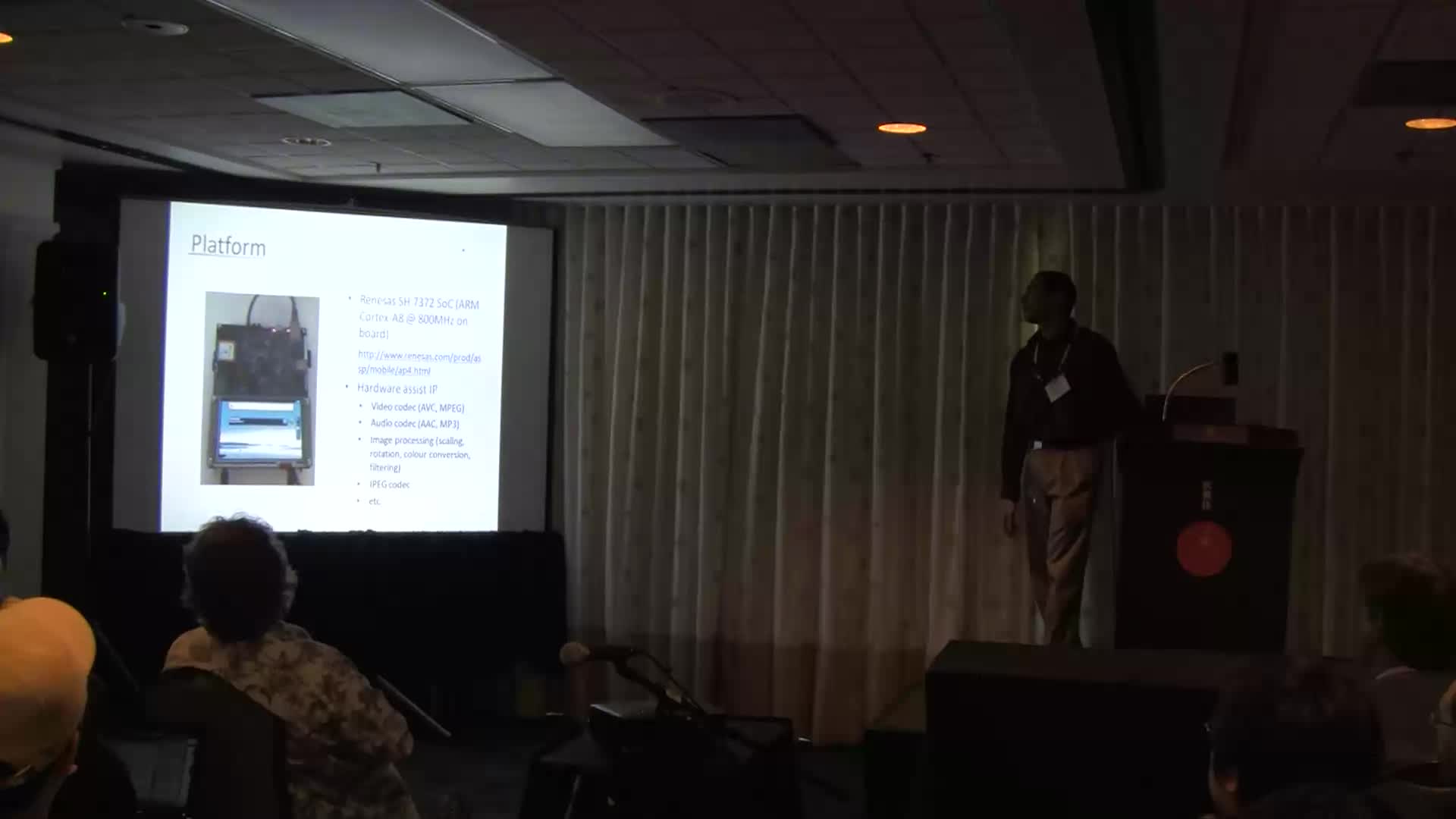
Damian Hobson Garcia, Katusya Matsubara, Takanari Hayama, Hisao Munakata Igel Integrating a Hardware Video Codec into Android Stagefright using OpenMAX IL Slides Video (55 minutes): full HD (564M), 450×800 (177M)
Koen Kooi Texas Instruments Integrating OpenEmbedded and Yocto Slides Video (52 minutes): full HD (465M), 450×800 (159M)
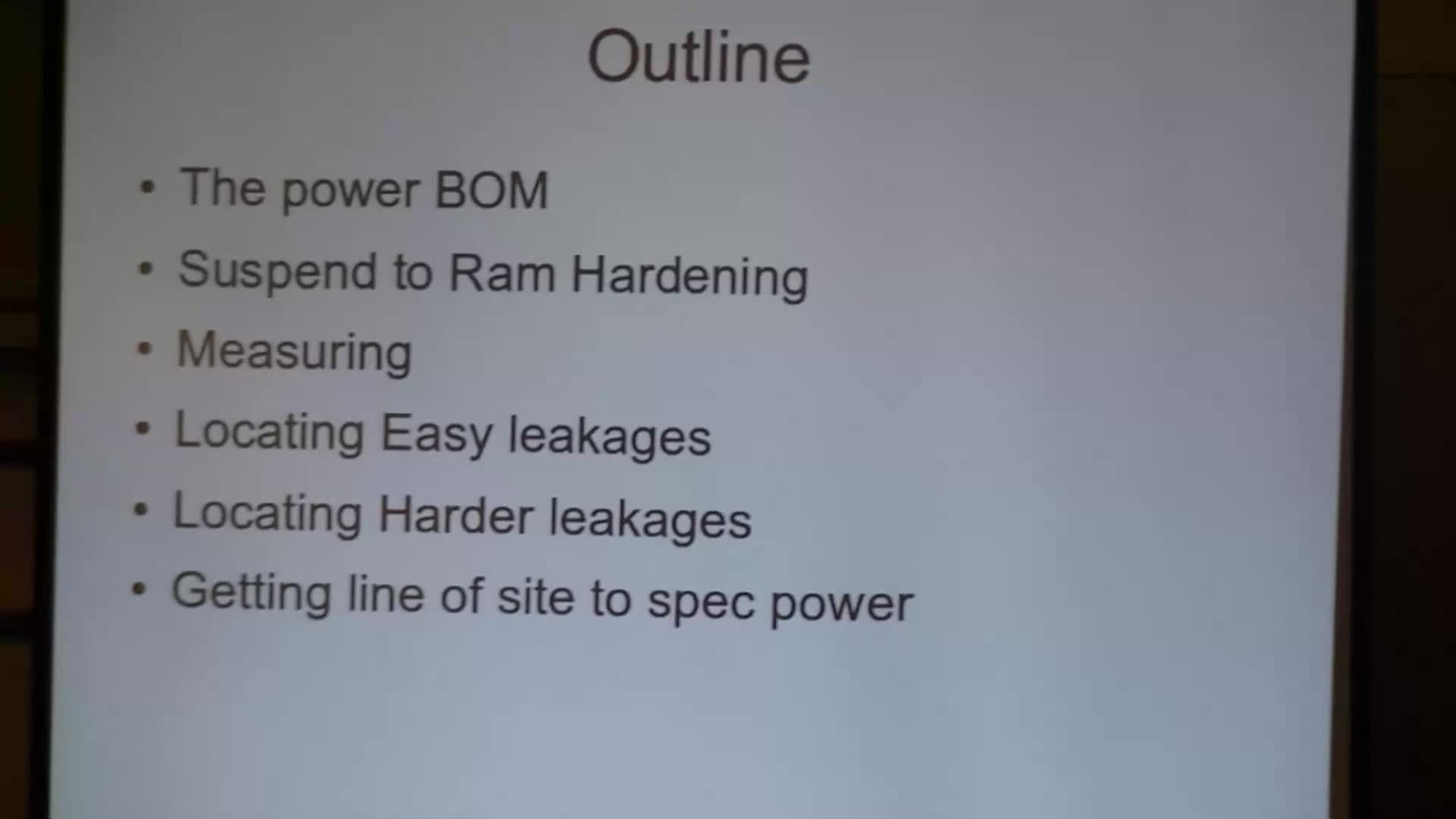
Mark Gross Intel How to power tune a device running on a Linux kernel for better suspend battery life Slides Video (49 minutes): full HD (273M), 450×800 (129M)
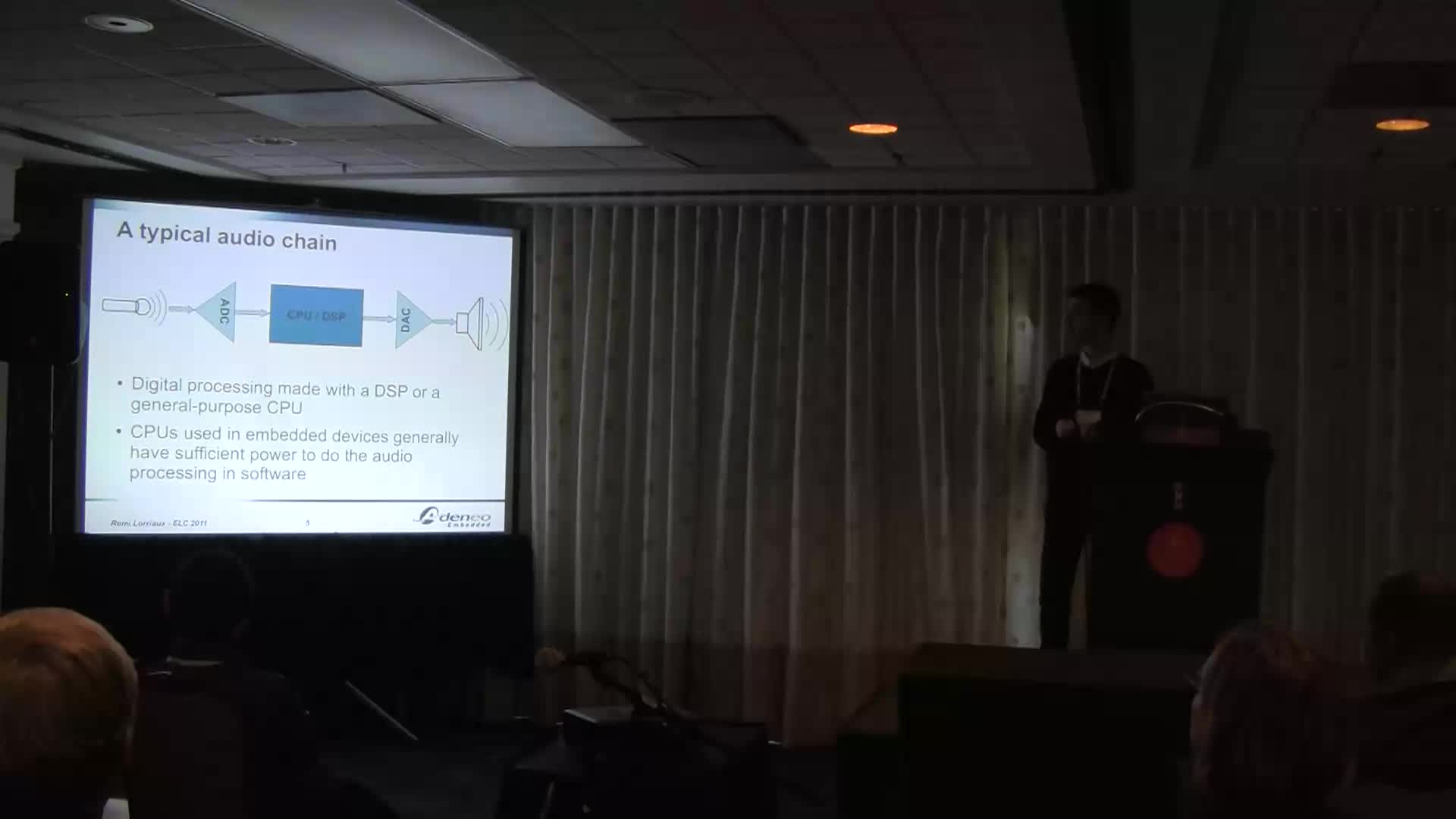
Remi Lorriaux Adeneo Embedded Real-time audio on embedded devices Slides Video (44 minutes): full HD (437M), 450×800 (138M)
Magnus Damm Runtime PM: upstream I/O device power management Slides Video (53 minutes): full HD (486M), 450×800 (164M)
Jesse Barker Linaro Linux graphics meets the ARM ecosystem Slides Video (50 minutes): full HD (329M), 450×800 (147M)
David Anders Texas Instruments Board bringup: open-source hardware and software tools Slides Video (38 minutes): full HD (376M), 450×800 (118M)
John Williams PetaLogix Dynamic co-simulation of FPGA-based systems on chip Slides Video (57 minutes): full HD (567M), 450×800 (198M)
Summit Semwal Texas Instruments Media Controller Framework (MCF) for OMAP2+ display subsystem Slides Video (49 minutes): full HD (518M), 450×800 (155M)
John Stultz IBM Android for servers? Slides Video (37 minutes): full HD (425M), 450×800 (137M)
Anand Gadiyar Texas Instruments Tools and techniques for debugging embedded systems Slides Video (30 minutes): full HD (139M), 450×800 (81M)
Hans Verkuil Cisco Video4linux: progress, new videobuf2 framework and the future Slides Video (56 minutes): full HD (534M), 450×800 (171M)
Yoshiya Hirase Nokia Faster resume for more energy saving on MeeGo Slides Video (58 minutes): full HD (727M), 450×800 (218M)
Jake Edge Linux Weekly News What embedded Linux developers should know about IPv6 Slides Video (46 minutes): full HD (266M), 450×800 (122M)
Grégoire Gentil Always Innovating Hot multi-OS switch: how to run Ubuntu, ChromiumOS, Android at the same time on an embedded device Video (61 minutes): full HD (515M), 450×800 (174M)
Xi Wang Broadcom Controlling memory footpring at all layers: Linux kernel, applications, libraries and toolchain Slides Video (38 minutes): full HD (511M), 450×800 (152M)
Tom Zanussi, Saul Wold Building custom embedded images with Yocto Slides Video (49 minutes): full HD (500M), 450×800 (173M)
Philip Balister Open SDR A high performance interface between the OMAP3 and a FPGA Slides Video (51 minutes): full HD (347M), 450×800 (149M)
Jean Pihet NewOldBits.com The evolution of tracing and profiling for power management and accelerators Slides Video (40 minutes): full HD (428M), 450×800 (133M)
Elizabeth Flanagan Intel Delivering predictability: the Yocto project autobuilder, automated sanity testing, license collection and build statistics tracking Slides Video (48 minutes): full HD (241M), 450×800 (133M)
Mythri pk Texas Instruments Bringing up HDMI display for OMAP4 Panda board: design, challenges and lessons learned Slides Video (40 minutes): full HD (363M), 450×800 (122M)
Khem Raj Debug/develop uClibc with QEMU Slides Video (35 minutes): full HD (226M), 450×800 (98M)
Gunter Ravi Sankar Samsung What are and how to find a program’s unused DSOs Slides Video (49 minutes): full HD (453M), 450×800 (143M)
In just two weeks from now, the Embedded Linux Conference will start in San Francisco, followed by the Android Builders Summit, at the usual Hotel Kabuki location, where the conference is taking place for the third consecutive year.
The program of the Embedded Linux Conference has been announced recently, and as usual, features a wide set of technical embedded Linux talks:
Filesystem/storage: Power Fail Safe FAT File System, Optimizations For Cheap Flash Media, from Arnd Bergmann, who has also recently published a very interesting article on the same topic.
Power management: Faster Resume For More Energy Savings on MeeGo, Powerdebug(ging): A Linaro Perspective, How to Power Tune a Device Running on a Linux Kernel for Better Suspend Battery Life, The Evolution of Tracing and Profiling for Power Management and Accelerators, Runtime PM: Upstream I/O Device Power Management
Real-time: Solving Real-Time Scheduling Problems with RT_PREEMPT and Deadline-Based Scheduler, Real-time Audio on Embedded Devices, Identifying Embedded Real-Time Latency Issues: I-Cache and Locks
Build system, with a huge number of Yocto-related talks, but no other build systems represented: State of OpenEmbedded Internal Toolchain and SDKs, Yocto Project: Practical Kernel Development Tutorial, Building Custom Embedded Images with Yocto, The Yocto Project and its Application Development Toolkit (ADT) – The Answer to Effective Embedded Application Development, Yocto Project Community BoFs, Delivering Predictability: The Yocto Project Autobuilder, Automated Sanity Testing, License Collection, and Build Statistics Tracking
Multimedia: Fun with QML and JavaScript, Integrating a Hardware Video Codec into Android Stagefright using OpenMAX IL, Media Controller Framework (MCF) For OMAP2+ Display Subsystem, Video4linux: Progress, New videobuf2 Framework and the Media Controller, Bringing up HDMI Display for OMAP4 Panda Board – Design, Challenges and Lessons Learned, Linux Graphics Meets the ARM Ecosystem
FPGA: Dynamic Co-simulation of FPGA-based Linux Systems-on-Chip, A High Performance Interface Between the OMAP3 and an FPGA
Networking: What Embedded Linux Developers Should Know About IPv6, Zigbee Networking & Linux
Debugging: Kernel Shark Tutorial and Tools and Techniques for Debugging Embedded Systems
Optimization: Snapshot Booting on Embedded Linux, ARM Neon Instruction Set and Why You Should Care, Controlling Memory Footprint at All Layers: Linux Kernel, Applications, Libraries and Toolchain, High-Performance Computing using GPUs, What Are and How to Find a Program’s Unused DSOs
Low-level: Board Bringup: Open Source Hardware and Software Tools, Working with HardIRQs: Life Beyond Static IRQ Assignments, Genie in the Bottle: Linux Drivers for the AM1808 PRU
And many other talks on various topics: LLVM, Clang and Embedded Linux Systems, Linaro: A Year of Change, Control, Recover and Debug Your Embedded Product with PCD, Developer’s Diary: Helping the Process, High-Level Web Interface to Low-Level Linux I/O on the Beagleboard, Linaro Automated Validation on ARM, Crowd Sourcing and Protecting the Open Source Community, Android for Servers?, Hot Multi-OS Switch: How to run Ubuntu, ChromiumOS, Android at the Same Time on an Embedded Device.
This edition will be the first one organized since the merge between the CE Linux Forum into the Linux Foundation, and will therefore be a great opportunity to see if this merge had any impact on the technical quality of the conference.
My colleagues Maxime Ripard (who joined Bootlin just a week ago) and Gregory Clement as well as myself will be present at the Embedded Linux Conference and the Android Builders Summit, and we will as usual record all talks of both of these conferences and will put them online, as we have done recently for the talks that took place during the Embedded Linux Conference Europe 2010 in Cambridge. Do not hesitate to meet us in San Francisco!
 To meet increasing demand for its Embedded Linux, kernel and Android engineering services, Bootlin is looking for developers:
To meet increasing demand for its Embedded Linux, kernel and Android engineering services, Bootlin is looking for developers:































 In agreement with the speakers, these videos are released under the terms of the
In agreement with the speakers, these videos are released under the terms of the