In a previous post, we detailed all the talks of the Embedded Systems and Open Hardware track of the Libre Software Meeting, taking place in Geneva in early July.
Bootlin will have a quite important presence at this event, with three talks and one tutorial given by Bootlin engineers. You’ll find below the descriptions of the talks given by Bootlin. Both my colleague Maxime Ripard and myself will be present at Libre Software Meeting, and we will be happy to meet you there to discuss Embedded Linux and Android topics!
A look through the Android Stack
Android has established itself in the past years as a major player in the mobile market, outperforming any other mobile systems.
To do so, Google relied both on well established open-source components, such as the Linux Kernel, and munching them together in a brand new userspace environment. This talk will detail the most important components of Android userspace and the interactions between them that allow developers to face a consistent API for their applications.
This talk will be given on Tuesday 9th July 2012, at 14:00, by Maxime Ripard, embedded Linux and Android engineer at Bootlin. Maxime is also teaching our newest training course on Android system development.
Buildroot: a nice, simple and efficient embedded Linux build system
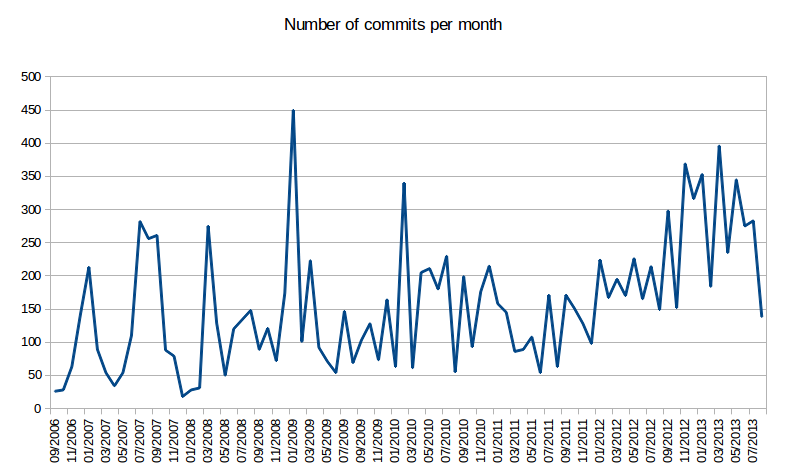
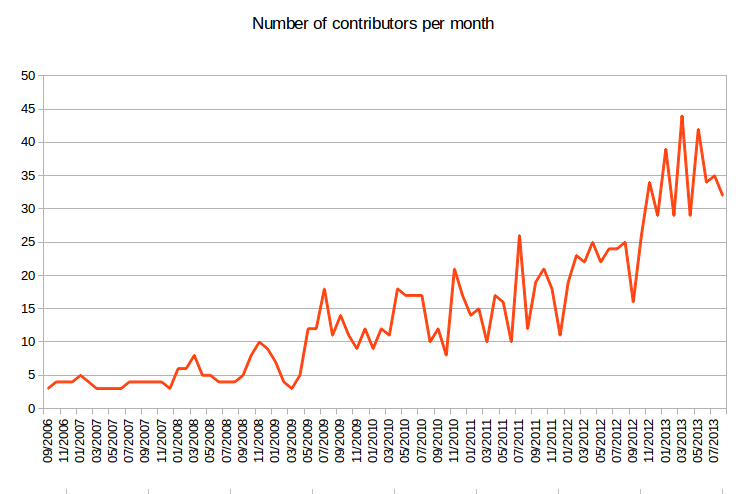
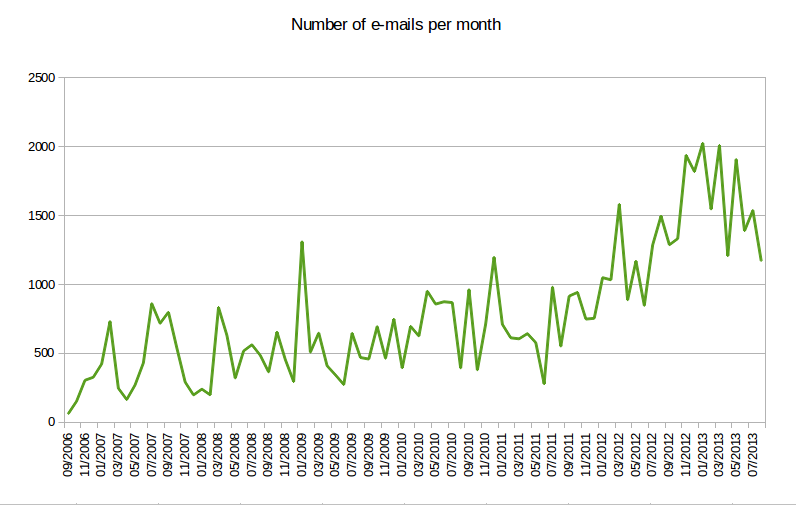
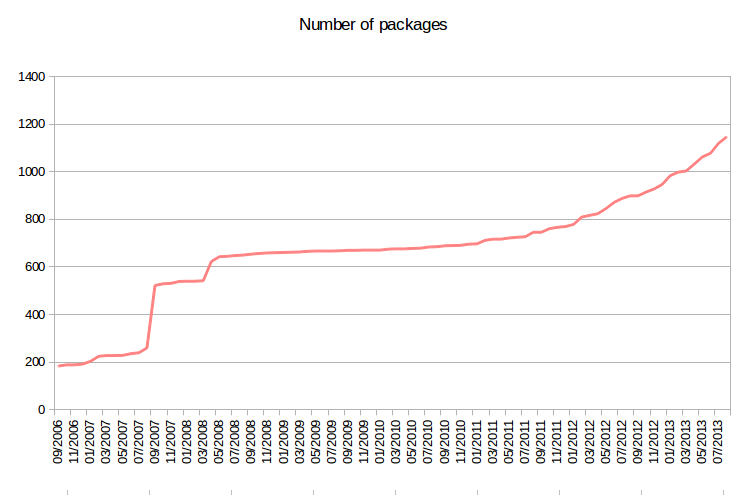
Started in late 2001 by uClibc developers, Buildroot has grown over its 10 years history from a testing tool for the uClibc C library to a complete, vendor-neutral, embedded Linux build system. Until early 2009, the project was mostly unmaintained and the quality slowly decreased, frustrating many Buildroot users. Fortunately, since early 2009, Peter Korsgaard took over the maintainership of Buildroot, and the project has considerably evolved since then: stable releases are published every three months, the user and developer community has grown significantly, the existing features have been cleaned up, many other new features have been added, the project is no longer uClibc-specific and the quality has been vastly improved. Buildroot now offers a nice, simple and efficient mechanism to build small to medium sized embedded Linux systems, such as the ones found in many industrial systems or highly dedicated systems. Many users are amazed about how easy it is to get started with Buildroot, especially compared to other build systems. This presentation will show how Buildroot can be used to build embedded Linux systems, highlighting the new features and improvements made over the last few years, and detailing how the simplicity of Buildroot allows you to focus on developing the applications for your system. A quick overview of the future Buildroot developments will also be provided.
This talk will take place on Wednesday 10th July at 17:00 and will be given by Thomas Petazzoni, embedded Linux engineer at Bootlin, and long time Buildroot contributor.
Linux kernel on ARM: consolidation work
In Spring 2011, Linus Torvalds asked the ARM Linux maintainers to clean up the contents of arch/arm/ in the Linux kernel code by doing more consolidation between ARM sub-architectures.
More than a year later, a lot of work has been accomplished in this area, especially thanks to the introduction of the device tree for the ARM architecture, the pinctrl subsystem and the clock framework into the Linux kernel.
Through this talk, we will present the challenges the ARM architecture creates in terms of Linux kernel support, and then describe from a technical point of view how the device tree, the pinctrl subsystem and the clock subsystem work and how they can improve the consolidation between different ARM sub-architectures.
The talk will be designed to be accessible to an audience having only a moderate knowledge of kernel programming and internals, and will therefore provide enough context for such audience to understand the issues that those different mechanisms are striving to solve.
This talk will take place on Thursday 11th July at 10:00 and will be given by Thomas Petazzoni, embedded Linux engineer at Bootlin.
Tutorial on using Buildroot, a nice, simple and efficient embedded Linux build system
Started in late 2001 by uClibc developers, Buildroot has grown over its 10 years history from a testing tool for the uClibc C library to a complete, vendor-neutral, embedded Linux build system. Until early 2009, the project was mostly unmaintained and the quality slowly decreased, frustrating many Buildroot users. Fortunately, since early 2009, Peter Korsgaard took over the maintainership of Buildroot, and the project has considerably evolved since then: stable releases are published every three months, the user and developer community has grown significantly, the existing features have been cleaned up, many other new features have been added, the project is no longer uClibc-specific and the quality has been vastly improved. Buildroot now offers a nice, simple and efficient mechanism to build small to medium sized embedded Linux systems, such as the ones found in many industrial systems or highly dedicated systems. Many users are amazed about how easy it is to get started with Buildroot, especially compared to other build systems.
This workshop follows the Buildroot presentation proposed in the same topic. During one half-day participants will be introduced on how to efficiently use Buildroot for their own projects:
- Basic usage of Buildroot: generate the first system, boot it on a hardware platform
- Add packages to Buildroot
- Customize Buildroot for real-life projects: how to integrate project specific patches, configuration and customization
Participants are invited to come with their own laptop, installed with a sufficiently recent GNU/Linux distribution. Participants are recommended to attend the Buildroot talk by the same speaker before attending the workshop, as the talk will give an overall introduction on Buildroot.
This tutorial will take place on Thursday 11th July from 14:00 to 17:00 and will be given by Thomas Petazzoni, embedded Linux engineer at Bootlin, and long time Buildroot contributor.
 This week-end is the first week-end of February, which on the schedule of all open-source developers is always booked for a major event of our community: the FOSDEM conference in Brussels. With several hundreds of talks over two days, this completely free event is one of the biggest event, if not the biggest of the open-source world.
This week-end is the first week-end of February, which on the schedule of all open-source developers is always booked for a major event of our community: the FOSDEM conference in Brussels. With several hundreds of talks over two days, this completely free event is one of the biggest event, if not the biggest of the open-source world.