This is the second Bootlin newsletter for 2012. We are happy to share with you the latest news about our projects, training courses and contributions.
New “Android system development” training
As announced in our previous newsletter, we have created a new Android system development training course.
This course targets engineers who need to develop embedded systems with Google Android. In four days, through theory and practical labs, the course makes you familiar with compiling and booting Android, with adapting Android to support a new embedded board (assuming that it is already supported by the Linux kernel), and with building a real system through accessing specific hardware, customizing the filesystem and using debugging techniques. More details and the complete agenda.
The first public session of this training will take place on June 11-14 2012 in Toulouse, France (session taught in English). There are still seats available for this session.
We will start giving on-site sessions of this course in July 2012. Do not hesitate to contact us if you want to organize on-site sessions.
Opening our training materials source code
Since Bootlin’screation in 2004, we have been releasing our training materials under the Creative Commons Attribution Share-Alike license, a free license that allows anyone to share, improve and use our embedded Linux and Linux kernel training materials. Since that time, our training materials were available as PDF files, and as OpenDocument files for the source code, but we were only updating their online version from time to time.
Now, we are proud to announce that our training materials are being converted to the LaTeX language, and their latest version is available at any time from our public Git repository.
For the moment, our embedded Linux slides have been published (about 500 slides) in this Git repository, as well as the instructions for the practical sessions of our embedded Linux and Linux kernel courses. In the near future, we will also publish in LaTeX the slides of our Linux kernel training (which remain available under PDF and OpenDocument formats) as well as the materials of our new “Android system development” course.
The creation of this public Git repository is a strong sign of our commitment for open training materials.
The LaTeX format and the public Git repository now make it easy for everyone to follow updates on our materials, to keep one’s knowledge up to date, and even to teach a training session using our materials (commercial use of our materials is welcome, as it helps to spread knowledge about Free and Open Source Software for embedded systems).
Upcoming public training sessions
Our next public training sessions dates and locations are:
- Embedded Linux kernel and driver development
June, 4-8 2012
Toulouse, France
Session given in French
Details - Android system development
June, 11-14 2012
Toulouse, France
Session given in English - Embedded Linux system development
June, 18-22 2012
Avignon, France
Session given in French
Details - Embedded Linux kernel and driver development
July 2-6, 2012
Avignon, France
Session given in French
Details - Embedded Linux kernel and driver development
October, 8-12 2012
Avignon, France
Session given in English
Details - Embedded Linux system development
October, 15-19 2012
Toulouse, France
Session given in French
Details - Embedded Linux system development
December, 3-7 2012
Avignon, France
Session given in English
Details - Embedded Linux system development
February, 4-8 2013
Lyon, France
Session given in French
Details
Projects
Since the beginning of the year, we have been involved in the following projects for various customers:
- Boot time optimization and power management evaluation for a MIPS-based platform used in a payment terminal;
- Filesystem size optimization, embedded Linux build system integration, Ethernet PHY driver development for an AT91 ARM platform used in satellite video processing;
- Embedded Linux build system integration and generic embedded Linux debugging and support for an AT91 ARM platform used as a gateway between medical devices;
- Starting in April, we will be working with a major ARM SoC vendor to help mainlining support for their latest SoC in the official Linux kernel sources;
- Continued the creation of materials for our new “Android system development” course.
- Continued our work on the Linux kernel driver for the Analog-to-Digital converters of the AT91 ARM SoC (see ‘Contributions’, below);
- Continued our work on real-time Linux evaluation on AT91 ARM SoC (see ‘Contributions’, below.).
Career opportunities
Bootlin is looking for a kernel developer in the the French Riviera, to be hired with a permanent contract. The job is open to English speaking people who do not speak French, but are ready to settle in the area of Nice, and be hired through a French contract. See details.
Conferences and contributions
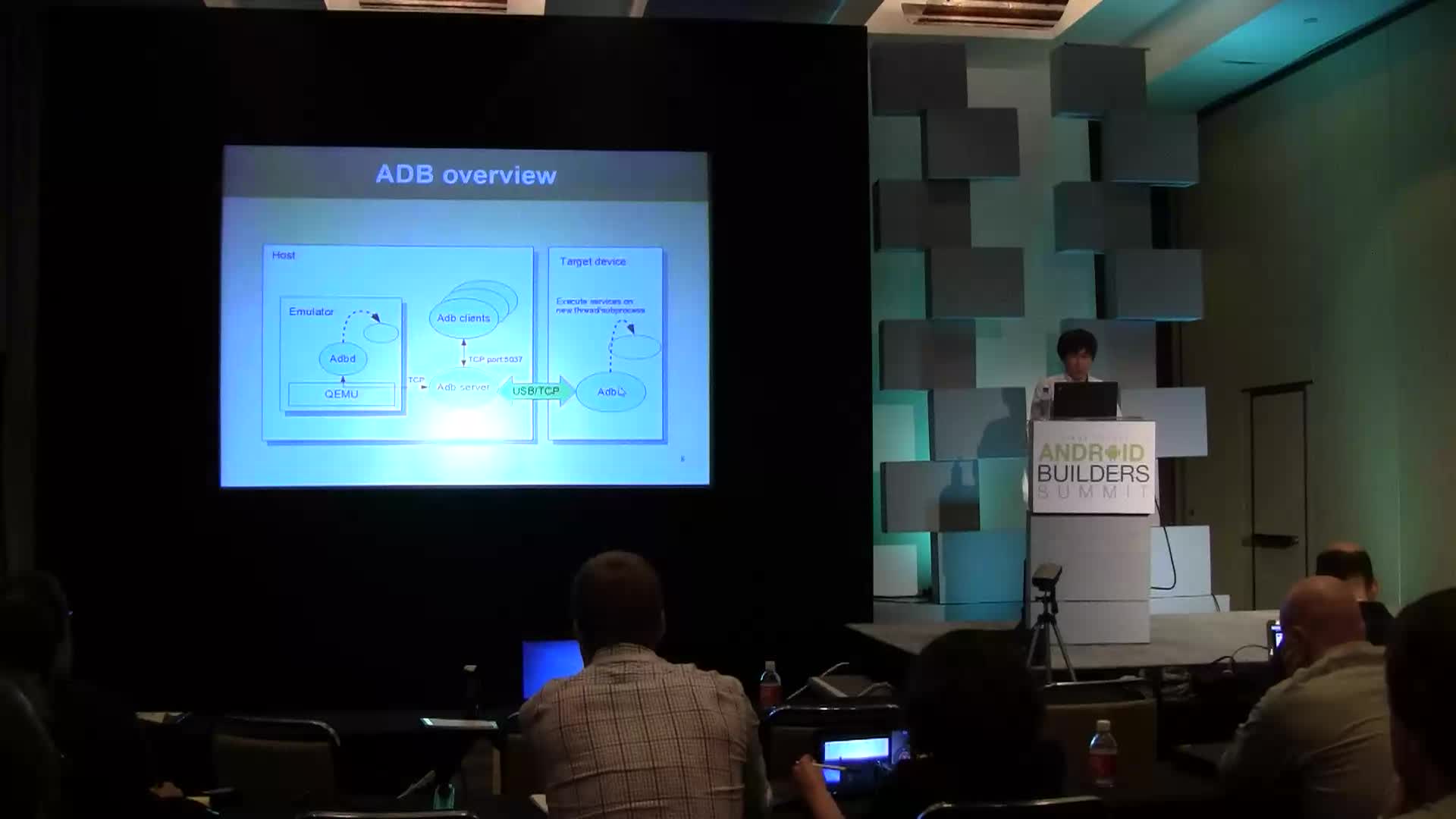
Embedded Linux Conference and Android Builders Summit
Three engineers of Bootlin attended the Embedded Linux Conference 2012 and Android Builders Summit 2012 in Redwood Shores, near San Francisco in California, on February. This strong participation of our engineers to technical conferences is a key factor to make sure we remain up to date on embedded Linux technologies and keep a close contact with the community.
During the conference, we have published daily reports about the various talks that we thought were interesting:
- First day at the Android Builders Summit
- Android Builders Summit: day 2, and Yocto Developer Day
- Embedded Linux Conference day 1
- Embedded Linux Conference day 2
- Embedded Linux Conference day 3
After the conference, we also posted videos of the talks:
Our scripts to encode videos to the royalty-free VP8 codec and add a title sequence to the videos are now available on on our public git server.
At this conference, our engineer Thomas Petazzoni has given a talk titled “Buildroot, a nice, simple and efficient embedded Linux build system”. Here are the slides and the video.
FOSDEM conference
Two of our engineers participated to the FOSDEM conference, a community-driven open-source conference, in early February.
Our engineer Maxime Ripard gave a talk on his work around the IIO kernel subsystem, which he used to write an ADC driver for the AT91 SoC. Here are the slides.
Our engineer Thomas Petazzoni gave a talk about “Using Qt for non-graphical applications”. Here are the slides.
AT91 Analog-to-Digital converter drivers
Details about the driver for the AT91 Analog-to-Digital converters driver written by Maxime Ripard from Bootlin have been published on the Atmel Linux4Sam wiki. This driver relies on the IIO framework, and we are in the process of getting this driver merged upstream. See the Atmel Linux4Sam wiki page.
Real-time Linux benchmarks
A report of extensive real-time benchmarks conducted by Gregory Clement from Bootlin on AT91 platforms has been published on the Atmel Linux4Sam Wiki. This report compares a vanilla Linux kernel, the PREEMPT-RT patches and the Xenomai co-kernel approach through timer-based and GPIO-based benchmarks. See the Atmel Linux4Sam wiki page.
Buildroot
Bootlin’sinvolvement in Buildroot is still strong:
- Maxime Ripard and Thomas Petazzoni participated to the Buildroot Developer Day organized in Brussels before the FOSDEM conference. A report of this meeting, which gathered several other Buildroot developers, is available at the Buildroot mailing list archives.
- Since the beginning of the year, Thomas Petazzoni has contributed 64 patches that have been merged: support for the LTT-ng Linux tracing solution, support to represent host utilities in the menuconfig, many updates and fixes to external toolchain support and many other fixes.
- In the same time-frame, Maxime Ripard has contributed 13 patches that have been merged: support for systemd, improvements to the package infrastructure and various fixes.
- Thomas Petazzoni has implemented a Web interface that publicly shows the result of our random configuration builds, available at http://autobuild.buildroot.org. The Buildroot community is doing random configuration builds 24/7 on three machines, with various configurations. This Web interface collects the build results and sends a summary every day on the Buildroot mailing-list. This has already allowed to fix many build issues, and will help to improve Buildroot’s quality in the future.
Linux kernel course
Participants to our Embedded Linux kernel and driver development course have also started contributing to the Linux kernel sources during the course itself. Here are the patches which have been merged so far:
During our git lab, instead of asking people to make dummy code changes, we ask them to make real improvements to the Linux sources, and send them for real to the right maintainers and mailing lists. This way, people get a better understanding of how they can interact with the Linux kernel developers to merge their changes and contributions.
See our slides and practical lab instructions for our git lectures and lab.
Blog posts
Bootlin has published several blog posts:
- Buildroot Developer Day, Brussels edition
- Announcing our Android system development training
- Bootlin at FOSDEM: two talks and video recording
- Bootlin at the Android Builders Summit and the Embedded Linux Conference: one talk and video recording
- HOWTO – Mailing lists with Mailman on Ubuntu 10.04
- Our blog posts on Android Builders Summit and Embedded Linux Conference listed previously
- Linux on ARM: xz kernel decompression benchmarks
- How to boot an uncompressed Linux kernel on ARM
- Android gdbclient command
- A new tool to ease kernel maintainer life
- Experiment with Yocto
- Report on extensive real-time Linux benchmarks on AT91
- Linux kernel engineer job in Nice
You can follow Bootlin’snews by reading our blog and by following our quick news on Twitter.
By the way, the right column of the Bootlin blog now lists the most popular posts and pages. This can help you to find useful content that you may have missed.
Bootlin remains available to help you in your embedded Linux projects, either through its development and support services or through its training sessions. Do not hesitate to contact us!
Gregory, Maria, Maxime, Michael and Thomas – Bootlin
 Bootlin is looking for a embedded Linux and kernel engineer in the area of Nice in France (on the French Riviera). The contract will be home based, but will also involve working at customer locations in the same area, possibly for long periods of time.
Bootlin is looking for a embedded Linux and kernel engineer in the area of Nice in France (on the French Riviera). The contract will be home based, but will also involve working at customer locations in the same area, possibly for long periods of time.