The Libre Software Meeting is a community-driven free software event that exists since 2000, composed of talks and workshops. Its 2012 edition will take place from July 7th to July 12th in Geneva, Switzerland.
In the context of this conference, I was responsible with Florian Fainelli from the OpenWRT project to organize the Embedded systems and open hardware track. This track will offer an interesting selection of talks related to embedded topics, concentrated between July 9th and July 11th:
Make a free camera fly with free hardware, Éric Boudrand. It will be the only talk of the track that will take place in French. The rest of the track contents will be in English.
The real time page I wrote for Atmel was finally released on the Linux4Sam Atmel Wiki. The purpose of this page was to help new comers to use real time features with Atmel CPUs and to present the state of the real time support.
Here are some figures associated to this work:
On this page I present the results of more than 300 hours of benchmarks!
During the setup and the tuning tests ran for more than 600 hours.
Analysis and formatting took a few dozen hours of work.
The benchmarks have been run on 3 boards, 3 flavors of Linux (vanilla, PREEMPT-RT patches, Xenomai co-kernel approach), and 2 kinds of tests (timer-based and GPIO-based)
I recently had the opportunity to use Yocto. I already practiced quite a lot with OpenEmbedded before. You can see Yocto as a project derived from OpenEmbedded even it is a bit more than that.
In fact, Yocto is made of Poky (a build system based on OpenEmbedded), a few added build tools (swabber, pseudo, etc.), as well as a set of meta data allowing to create embedded distributions for a number of targets.
The strength but also the weakness of OpenEmbedded is that it a very flexible build system. It can make production root filesystems, but also a complete distribution with its ready to use package repository, and this for multiple hardware platforms. It makes it a difficult system to get started and get efficient with. Even two years ago, the OpenEmbedded documentation contributed to making it difficult to get started. Indeed, OpenEmbedded did supply some documentation, but which only started to make sense once you start mastering it. This is quite a paradox for a piece of documentation. It lacked the elements allowing developers to understand its operation well.
With Yocto, I was pleased to realize that substantial progress had been made on this side. The project comes with documentation that is much more exhaustive and above all much more accessible for beginners. Getting started with it is still not completely straightforward, but this time, this is rather because of the complexity and the rich features of the tool.
In a few hours, I managed to develop a minimalistic BSP (Board Support Package) for a given board (in this case a AT91SAM9G20-EK). The concept of layer allows to have a configuration layer specific to a given piece of hardware. You can even support multiple hardware platforms at once and add specific packages. A layer is indeed just a set of packages and configurations (or configuration overrides). The BSP is just a layer specific to one or several pieces of hardware.
As you can see, even to support a simple embedded board, there is already a number of concepts to deal with. There are also multiple ways of achieving the same result but which will be easier or more difficult to maintain. The concept of “BSP” for Yocto is therefore a kind of guideline to allow the Yocto community to have a common point of reference. I will try to illustrate the use of a BSP on the AT91SAMG20-EK board here and/or on my Google+ page.
Another significant progress is optimizing build time for a “minimalistic” target, which went down from more than three hours to just over one hour now. It remains a long time for a very simple target.
To build a filesystem image with only a few components, Buildroot remains much more appropriate. For systems that require a great number of components, more advanced functionality is then often needed, such as managing a package repository and supporting multiple hardware platforms at once for example. In this case, Yocto remains the best (the only?) option, all the more as this project addresses the traditional weaknesses of OpenEmbedded.
The 2012 edition of the Embedded Linux Conference took place on February 15-17th 2012 at Redwood Shores near San Francisco in California. Three engineers of Bootlin attended this conference, and we reported every day our impressions about the talks, see our blog posts for day 1, day 2 and day 3. We have now taken the time to encode all the videos we have recorded during this event, and are proud to distribute them today.
It is worth noting that for the first time, the Linux Foundation was also recording videos of the talks, the Linux Foundation videos are available from video.linux.com, and we included links to these videos below for the different talks.
We hope that those of you who couldn’t attend the conference will enjoy those videos, with many great talks on technical embedded Linux topics.
Loïc Pallardy Saving the Power Consumption of the Unused Memory Slides Bootlin video (46 minutes): full HD (378M), 450×800 (125M)
Bernhard Rosenkränzer Linaro What Android and Embedded Linux Can Learn From Each Other Slides Linux Foundation video Bootlin video (40 minutes): full HD (370M), 450×800 (129M)
Ricardo Salveti de Araujo Linaro Ubuntu on ARM: Improvements and Optimizations Done By Linaro Slides Linux Foundation video Bootlin video (46 minutes): full HD (301M), 450×800 (140M)
Sean Hudson Mentor Graphics, Inc. Embedded Linux Pitfalls Slides Bootlin video (51 minutes): full HD (483M), 450×800 (176M)
Vincent Guittot Linaro Comparing Power Saving Techniques For Multicore ARM Platforms Slides Linux Foundation video Bootlin video (57 minutes): full HD (307M), 450×800 (154M)
Bruce Ashfield Wind River A View From the Trenches: Embedded Functionality and How It Impacts Multi-Arch Kernel Maintenance Slides Bootlin video (54 minutes): full HD (741M), 450×800 (222M)
Matt Porter Texas Instruments Passing Time With SPI Framebuffer Driver Slides
Bootlin video (54 minutes): full HD (565M), 450×800 (172M)
Wookey Linaro Multiarch and Why You Should Care: Running, Installing and Crossbuilding With Multiple Architectures Slides Bootlin video (42 minutes): full HD (453M), 450×800 (143M)
Amit Daniel Kachhap Linaro/Samsung A New Simplified Thermal Framework For ARM Platforms Slides Linux Foundation video Bootlin video (41 minutes): full HD (226M), 450×800 (115M)
Tsugikazu Shibata NEC On The Road: To Provide the Long-Term Stable Linux For The Industry Slides Linux Foundation video Bootlin video (32 minutes): full HD (304M), 450×800 (95M)
Thomas P. Abraham Samsung Electronics Experiences With Device Tree Support Development For ARM-Based SOC’s Slides Bootlin video (44 minutes): full HD (509M), 450×800 (155M)
Thomas Petazzoni Bootlin Buildroot: A Nice, Simple, and Efficient Embedded Linux Build System Slides Linux Foundation video Bootlin video (56 minutes): full HD (594M), 450×800 (182M)
Edward Hervey Collabora GStreamer 1.0: No Longer Compromise Flexibility For Performance Slides Linux Foundation video Bootlin video (49 minutes): full HD (540M), 450×800 (174M)
Tim Bird Sony Network Entertainment Embedded-Appropriate Crash Handling in Linux Slides Linux Foundation video Bootlin video (49 minutes): full HD (292M), 450×800 (142M)
Mark Gisi Wind River Systems The Power of SPDX – Sharing Critical Licensing Information Within a Linux Device Supply Chain Linux Foundation video Bootlin video (49 minutes): full HD (498M), 450×800 (164M)
Yoshitake Kobayashi Toshiba Ineffective and Effective Ways To Find Out Latency Bottlenecks With Ftrace Slides Linux Foundation video Bootlin video (37 minutes): full HD (251M), 450×800 (108M)
Ohad Ben-Cohen Wizery / Texas Instruments Using virtio to Talk With Remote Processors Slides Linux Foundation video Bootlin video (54 minutes): full HD (582M), 450×800 (182M)
Elizabeth Flanagan Intel Embedded License Compliance Patterns and Antipatterns Linux Foundation video Bootlin video (44 minutes): full HD (391M), 450×800 (144M)
Frank Rowand Sony Network Entertainment Real Time (BoFs) Slides Bootlin video (77 minutes): full HD (924M), 450×800 (288M)
Mike Turquette Texas Instruments Common Clock Framework (BoFs) Slides Bootlin video (53 minutes): full HD (333M), 450×800 (148M)
Hunyue Yau HY Research LLC Userland Tools and Techniques For Linux Board Bring-Up and Systems Integration Slides Linux Foundation video Bootlin video (51 minutes): full HD (407M), 450×800 (136M)
Koen Kooi The Angstrom Distribution Producing the Beaglebone and Supporting It Linux Foundation video Bootlin video (42 minutes): full HD (398M), 450×800 (126M)
On February 13-14th 2012, the second edition of the Android Builders Summit took place in Redwood Shores, near San Francisco in California. While Bootlin was not officially in charge of video recording for this conference, we recorded the talks we attended and that we are glad to share below. The Linux Foundation has also recorded those talks (except a few of them for which they had technical issues), and we provide those additional links below. You can also follow our reports from day 1 and day 2 of this conference.
You’ll find below our videos of the main talks we recorded, and also the videos of the lightning talks that took place on the evening of the first day of the conference. Enjoy!
Main talks
Karim Yaghmour Opersys Leveraging Linux’s History With Android Slides Bootlin video (32 minutes): full HD (386M), 450×800 (107M)
Arnd Bergmann, Tim Bird, Greg Kroah-Hartmann, Zach Pfeffer, moderated by Jonathan Corbet IBM/Linaro, Sony Network Entertainment, The Linux Foundation, Linaro, LWN.net Panel: Android and the Linux Kernel Mainline: Where Are We? Bootlin video (38 minutes): full HD (525M), 450×800 (156M)
Jason Kridner, Khasim Syed Mohammed Texas Instruments Using Android outside of the Mobile Phone Space Slides Linux Foundation video Bootlin video (34 minutes): full HD (414M), 450×800 (120M)
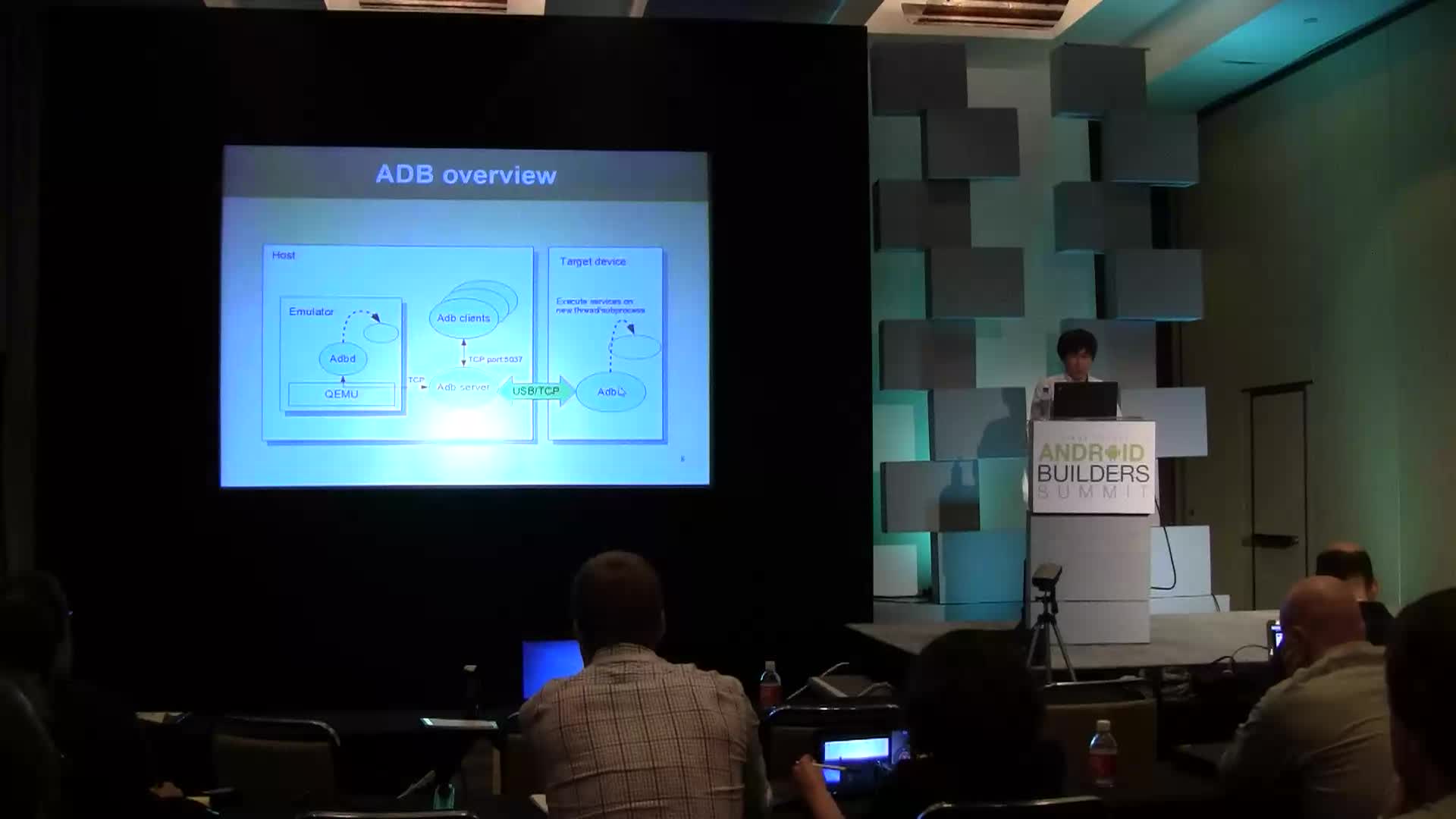
Rodrigo Chiossi Samsung AndroidXRef: Speeding up the Development of Android Internals Slides Linux Foundation video Bootlin video (38 minutes): full HD (313M), 450×800 (108M)
Jen Costillo Topics in Designing An Android Sensor Subsystem: Pitfalls and Considerations Slides Linux Foundation video Bootlin video (36 minutes): full HD (238M), 450×800 (101M)
Aleksandar (Saša) Gargenta Marakana Android Services Black Magic Linux Foundation video Bootlin video (61 minutes): full HD (410M), 450×800 (169M)
Lightning talks
Dario Laverde HTC HTC Dev Bootlin video (3 minutes): full HD (44M), 450×800 (13M)
Robert McQueen Collabora Integrating GStreamer and PulseAudio in Android Bootlin video (4 minutes): full HD (49M), 450×800 (16M)
Mark Gross Intel Android build times and host tweakage Bootlin video (4 minutes): full HD (37M), 450×800 (13M)
Tony Mansson Linaro Painless debugging of native code in Android-based device (using DS-5) Bootlin video (4 minutes): full HD (32M), 450×800 (13M)
Paul Arssov ARS Technologies Inc. How easy is it to support external hardware on Android platform Bootlin video (4 minutes): full HD (33M), 450×800 (13M)
Karim Yaghmour Opersys Cyborgstack Bootlin video (4 minutes): full HD (60M), 450×800 (18M)
Yahya Mirza Aurora Borealis Software Towards a heterogeneous application for compute driver performance testing and analysis Bootlin video (3 minutes): full HD (47M), 450×800 (14M)
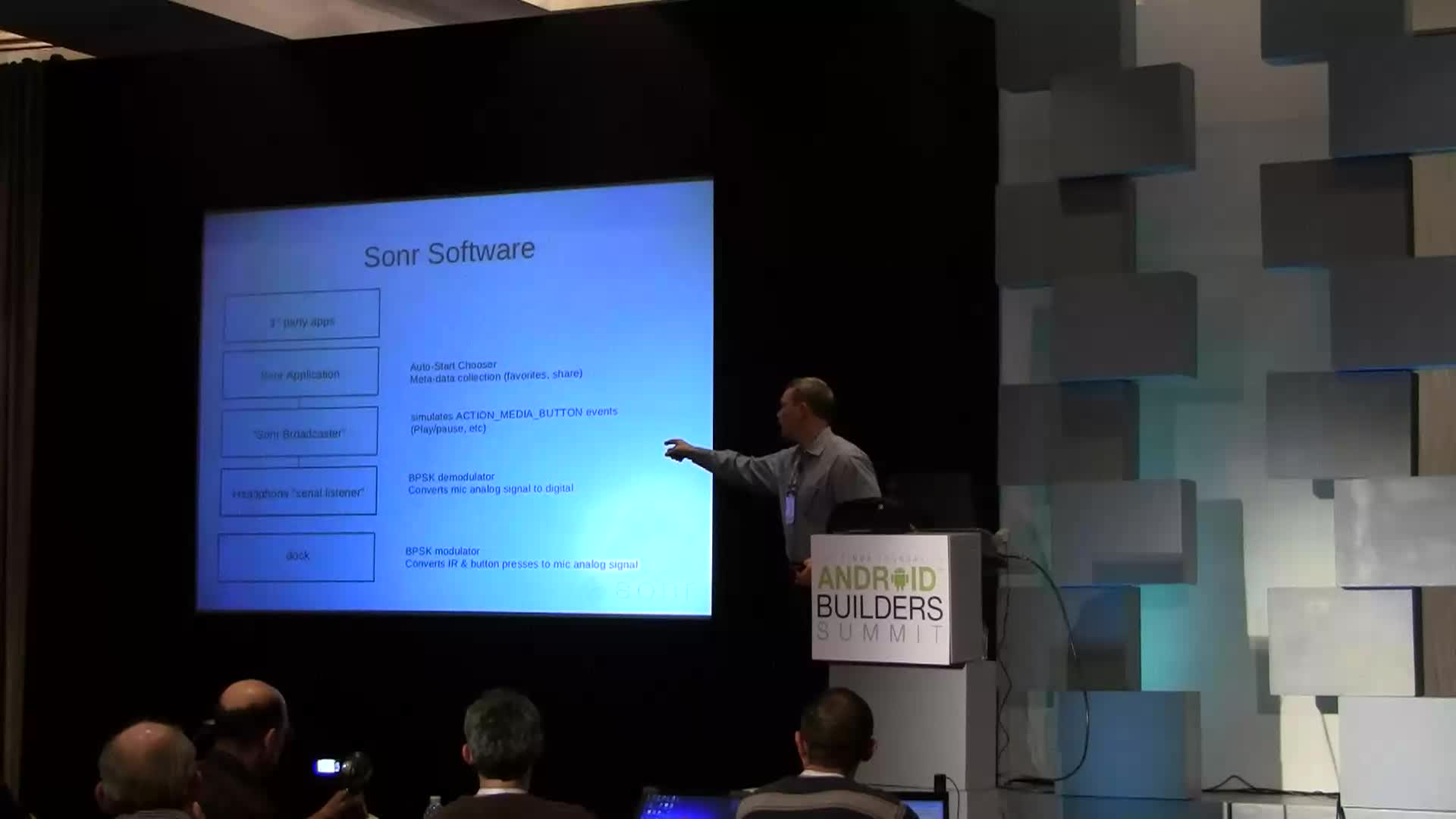
Joe Born Sonrlabs Sonr, Serial headphone interface and hardware Bootlin video (4 minutes): full HD (38M), 450×800 (13M)
When you are involved in mainlining or maintaining some kernel code, a non negligible part of your time is spent checking patches or patchsets themselves . It is not the most interesting part but it is truly necessary to help merging in kernel code, or to make sure you don’t break anything, for example building with an incompatible configuration.
Aiaiai developed by Artem Bityutskiy is a tool to do most of this task for you! It uses other checking tools and scripts such as sparse, coccinelle and checkpatch.pl, and comes with its own set of tools and scripts. I don’t know what does “aiaiai” stands for, but in French it sounds like “Ouch Ouch Ouch”, the sound you could make if you forget to use this tool 😉
PS: On my G+ post, Yegor Yefremov pointed that “aiaiai” means something like “tsk tsk!” (shame on you!) in Russian.
Before you even start building Android, Google’s instructions tell you to source the build/envsetup.sh shell script.
This script exports a number of environment variables (that’s why you have to source it), mostly setting the PATH to your different toolchains and to your output directories.
It also defines a number of shell functions. Among them some functions are advertised, like the well-know lunch, that is used to configure to some extent the build system, or the grepping functions, but some are not, like pid, which uses adb to get the PID of a process running on the device.
Among the latter, one seems pretty useful: gdbclient. What gdbclient does is obviously gdb related but in fact it does more than that.
First, you run it by doing gdbclient <binary>:<port> <process_name>
Then it sets up adb with the forward command so that you use it as a transport layer to your device, while it appears as (in that case) opened TCP sockets both on your machine and on the device.
Then, it attaches a gdbserver to the process you gave as the third argument on the device.
Finally, it launches your cross-gdb on your workstation, loads the debugging symbols from the file passed as first argument, and sets up a remote debugging session. All of that through USB!
This is definitely useful, and I can’t say why Google doesn’t advertise it more, but hey, it’s there!
This is a quick post to share my experience booting uncompressed Linux kernel images, during the benchmarks of kernel compression options, and no compression at all was one of these options.
It is sometimes useful to boot a kernel image with no compression. Though the kernel image is bigger, and takes more time to copy from storage to RAM, the kernel image no longer has to be decompressed to RAM. This is useful for systems with a very slow CPU, or very little RAM to store both the compressed and uncompressed images during the boot phase. The typical case is booting CPUs emulated by FPGA, during processor development, before the final silicon is out. For example, I saw a Cortex A15 chip boot at 11 MHz during Linaro Connect Q2.11 in Budapest. At this clock frequency, booting a kernel image with no compression saves several minutes of boot time, reducing development and test time. Note that with such hardware emulators, copying the kernel image to RAM is cheap, as it is done by the emulator from a file given by the user, before starting to emulate the system.
Building a kernel image with no compression on ARM is easy, but only once you know where the uncompressed image is and what to do! For people who have never done that before, I’m sharing quick instructions here.
To generate your uncompressed kernel image, all you have to do is run the usual make command. The file that you need is arch/arm/boot/Image.
Depending on the bootloader that you use, this could be sufficient. However, if you use U-boot, you still need to put this image in a uImage container, to let U-boot know about details such as how big the image is, what its entry point is, whether it is compressed or not… The problem is you can’t run make uImage any more to produce this container. That’s because Linux on ARM has no configuration option to keep the kernel uncompressed, and the uImage file would contain a compressed kernel.
Therefore, you have to create the uImage by invoking the mkimage command manually. To do this without having to guess the right mkimage parameters, I recommend to run make V=1 uImage once:
$ make V=1 uImage
...
Kernel: arch/arm/boot/zImage is ready
/bin/bash /home/mike/linux/scripts/mkuboot.sh -A arm -O linux -T kernel -C none -a 0x80008000 -e 0x80008000 -n 'Linux-3.3.0-rc6-00164-g4f262ac' -d arch/arm/boot/zImage arch/arm/boot/uImage
Image Name: Linux-3.3.0-rc6-00164-g4f262ac
Created: Thu Mar 8 13:54:00 2012
Image Type: ARM Linux Kernel Image (uncompressed)
Data Size: 3351272 Bytes = 3272.73 kB = 3.20 MB
Load Address: 80008000
Entry Point: 80008000
Image arch/arm/boot/uImage is ready
Don’t be surprised if the above message says that the kernel is uncompressed (corresponding to -C none). If we told U-boot that the image is already compressed, it would take care of uncompressing it to RAM before starting the kernel image.
Now, you know what mkimage command you need to run. Just invoke this command on the Image file instead of zImage (you can directly replace mkuboot.sh by mkimage):
$ mkimage -A arm -O linux -T kernel -C none -a 0x80008000 -e 0x80008000 -n 'Linux-3.3.0-rc6-00164-g4f262ac' -d arch/arm/boot/Image arch/arm/boot/uImage
Image Name: Linux-3.3.0-rc6-00164-g4f262ac
Created: Thu Mar 8 14:02:27 2012
Image Type: ARM Linux Kernel Image (uncompressed)
Data Size: 6958068 Bytes = 6794.99 kB = 6.64 MB
Load Address: 80008000
Entry Point: 80008000
Once the uImage generated, you can load it in RAM at its final location, which is at the 0x8000 offset in RAM, minus the uImage header size (64 bytes), so in our case that would be 0x80007fc0. You can finally start the kernel, with bootm.
I recently managed to find time to clean up and submit my patches for xz kernel compression support on ARM, which I started working on back in November, during my flight to Linaro Connect. However, it was too late as Russell King, the ARM Linux maintainer, alreadyaccepted a similar patch, about 3 weeks before my submission. The lesson I learned was that checking a git tree is not always sufficient. I should have checked the mailing list archives too.
The good news is that xz kernel compression support should be available in Linux 3.4 in a few months from now. xz is a compression format based on the LZMA2 compression algorithm. It can be considered as the successor of lzma, and achieves even better compression ratios!
Before submitting my patches, I ran a few benchmarks on my own implementation. As the decompressing code is the same, the results should be the same as if I had used the patches that are going upstream.
Benchmark methodology
For both boards I tested, I used the same pre 3.3 Linux kernel from Linus Torvalds’ mainline git tree. I also used the U-boot bootloader in both cases.
I used the very useful grabserial script from Tim Bird. This utility reads messages coming out of the serial line, and adds timestamps to each line it receives. This allow to measure time from the earliest power on stages, and doesn’t slow down the target system by adding instrumentation to it.
Our benchmarks just measure the time for the bootloader to copy the kernel to RAM, and then the time taken by the kernel to uncompress itself.
Loading time is measured between “reading uImage” and “OK” (right before “Starting kernel”) in the bootloader messages.
Compression time measured between “Uncompressing Linux” and “done”:
The Panda board has a fast dual Cortex A9 CPU (OMAP 4430) running at 1 GHz. The standard way to boot this board is from an MMC/SD card. Unfortunately, the MMC/SD interface of the board is rather slow.
In this case, we have a fast CPU, but with rather slow storage. Therefore, the time taken to copy the kernel from storage to RAM is expected to have a significant impact on boot time.
This case typically represents todays multimedia and mobile devices such as phones, media players and tablets.
Compression
Size
Loading time
Uncompressing time
Total time
gzip
3355768
2.213376
0.501500
2.714876
lzma
2488144
1.647410
1.399552
3.046962
xz
2366192
1.566978
1.299516
2.866494
lzo
3697840
2.471497
0.160596
2.632093
None
6965644
4.626749
0
4.626749
Results on Calao Systems USB-A9263 (AT91)
The USB-A9263 board from Calao Systems has a cheaper and much slower AT91SAM9263 CPU running at 200 MHz.
Here we are booting from NAND flash, which is the fastest way to boot a kernel on this board. Note that we are using the nboot command from U-boot, which guarantees that we just copy the number of bytes specified in the uImage header.
In this case, we have a slow CPU with slow storage. Therefore, we expect both the kernel size and the decompression algorithm to have a major impact on boot time.
This case is a typical example of industrial systems (AT91SAM9263 is still very popular in such applications, as we can see from customer requests), booting from NAND storage operating with a 200 to 400 MHz CPU.
Compression
Size
Loading time
Uncompressing time
Total time
gzip
2386936
5.843289
0.935495
6.778784
lzma
1794344
4.465542
6.513644
10.979186
xz
1725360
4.308605
4.816191
9.124796
lzo
2608624
6.351539
0.447336
6.798875
None
4647908
11.080560
0
11.080560
Lessons learned
Here’s what we learned from these benchmarks:
lzo is still the best solution for minimum boot time. Remember, lzo kernel compression was merged by Bootlin.
xz is always better than lzma, both in terms of image size. Therefore, there’s no reason to stick to lzma compression if you used it.
Because of their heavy CPU usage, lzma and xz remain pretty bad in terms of boot time, on most types of storage devices. On systems with a fast CPU, and very slow storage though, xz should be the best solution
On systems with a fast CPU, like the Panda board, boot time with xz is actually pretty close to lzo, and therefore can be a very interesting compromise between kernel size and boot time.
Using a kernel image without compression is rarely a worthy solution, except in systems with a very slow CPU. This is the case of CPUs emulated on an FPGA (typically during chip development, before silicon is available). In this particular case, copying to memory is directly done by the emulator, and we just need CPU cycles to start the kernel.
Finally, the last day of the 2012 edition of the Embedded Linux Conference has arrived. Including the Android Builders Summit, it was a very busy week with five full days of presentations, a very intensive learning session, but also highly motivating and refreshing. Here is, with a little bit of delay, the report of this last day.
Thanks to the kind help of Benjamin Zores (from Alcatel/Lucent, the GeeXboX and OpenBricks projects) who kindly accepted to record the Userland Tools and Techniques For Linux Board Bring-Up and Systems Integration, both Grégory and myself could attend the talk from Greg Ungerer titled M68K: Life in the Old Architecture. Greg started with a very nice and clear explanation of the history of the 68k architecture from a hardware perspective, and detailed its evolution into the Coldfire architecture. The history is quite complicated: the first 68k processors had no MMU, and then MMU was added starting at the 68030 family. However, when Freescale started with Coldfire, which uses a subset of the 68k instruction set, they removed the MMU, until Coldfire V4e, on which an MMU is available. Originally, the Linux port in arch/m68k only supported the classic 68k with MMU, and support for non-MMU Coldfires was added in uClinux. Later, support for non-MMU Coldfires was added into the mainline kernel in arch/m68knommu, with unfortunately a lot of duplication from arch/m68k. The two directories have been merged again some time ago: the merge had already been done in a mechanic fashion (merging identical files, renaming different files that had similar names), and a huge cleanup effort has taken place since then. The cleanup effort is not completely done yet, but it’s getting close, according to Greg Ungerer. At the end of the session, there has been a question on how m68k/coldfire developers typically generate their userspace, and Greg said he uses something similar to Buildroot, which in fact is uClinux-dist. I jumped in, and said that we would definitely like to have Coldfire support, especially since the activity on uClinux-dist isn’t very strong. I also asked what were the remaining differences between the uClinux kernel and the mainline kernel, and according to Greg, there is almost no difference now except maybe support for a few boards. Greg only uses the mainline Linux kernel now for his m68k and Coldfire developments.
The next conference I attended was the talk from Gary Bisson (Adeneo Embedded) titled Useful USB Gadgets on Linux. I rescued the speaker by lending my laptop because his laptop had no VGA output. Fortunately, the speaker was French, so he could adapt quickly to our bizarre azerty keyboard layout. Gary gave quite a bit of context on what USB is, and explained the USB terminology such as interfaces, end-points, configurations, etc. He then quickly described the Linux USB Gadget stack and gadgetfs for the implementation of USB gadget drivers in userspace. He then presented the existing USB gadget drivers in the kernel, mainly the zero gadget driver (for testing purposes), the mass storage gadget driver, the serial gadget driver and the Ethernet gadget driver. At the end of the presentation, he made a demonstration on a BeagleBoard-XM with the gadget multi driver, which allows to expose multiple gadget interfaces at the same time. So he showed that he could expose the Ethernet interface, the Mass Storage interface and the Serial interface, and demonstrated their usage from the host machine. Overall the talk was good, but I was personally expecting a more in-depth look at USB Gadget driver development, and not only usage: I have already been using gadget drivers for some time now, and I was more interested in having details on developing custom gadget drivers rather than simply on using the existing ones.
Bootlin engineering team (missing: Michael Opdenacker). From left to right: Grégory Clément, Maxime Ripard and Thomas Petazzoni
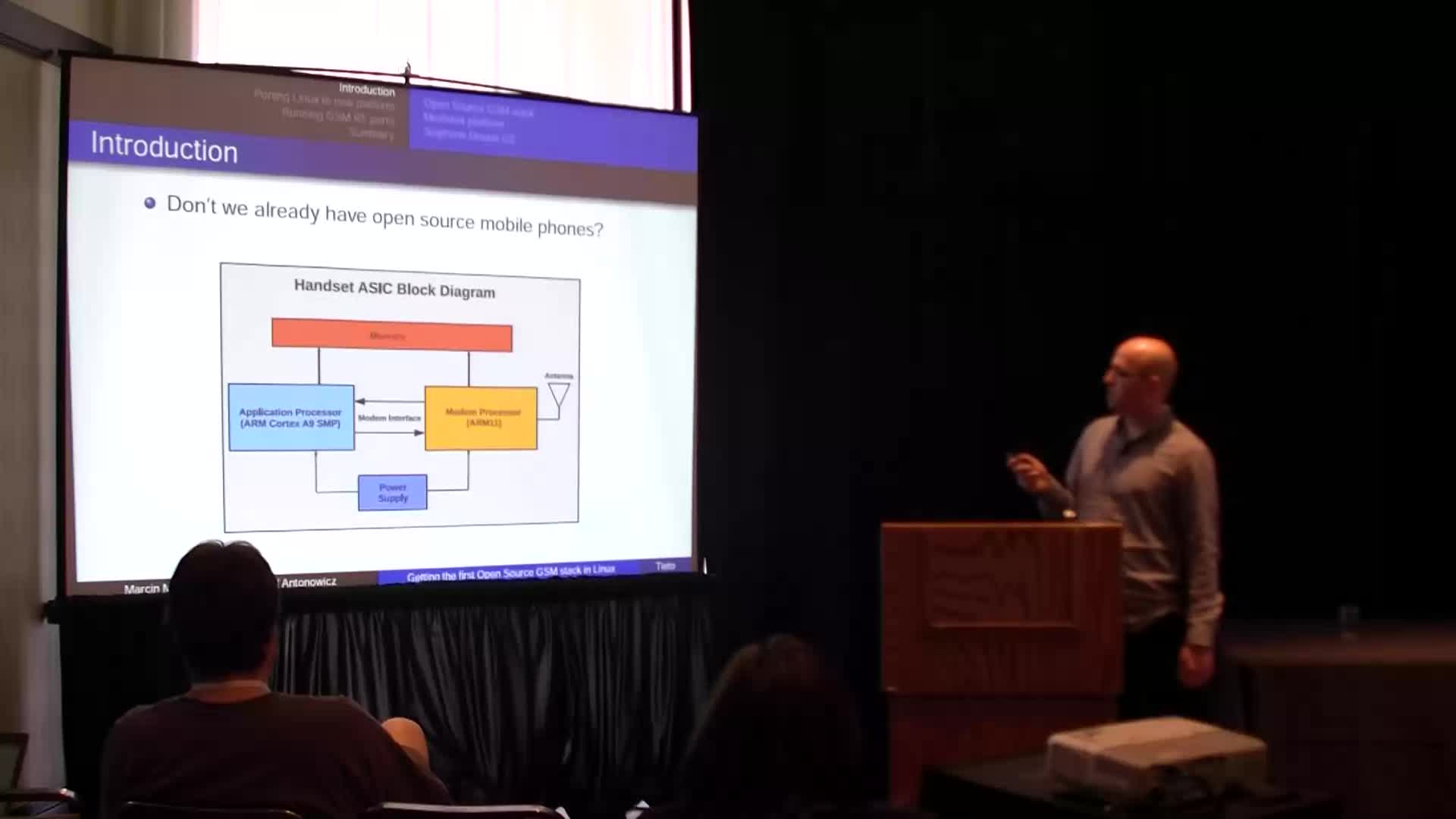
After a quick break, Grégory and I attended the Getting the First Open Source GSM Stack in Linux talk by Marcin Mielczarczyk from Tieto. It was an absolutely excellent talk. Marcin described the work he and one of his colleague did to reverse engineer a cheap Chinese phone and port U-Boot and Linux on it. Marcin started by giving details about the landscape of those cheap Chinese phones, and it was quite funny: there are brands like Nokla, Sany Eracsson or SciPhone that create phones that are similar in shape and design to phones from the original brands, but with completely different hardware, and usually completely different software. Marcin said that the great thing about those phones is that they are really cheap (which is nice when you need to do some hardware modifications on them for reverse engineering purposes), can easily be bought from auction sites like eBay, and usually do not use any sort of encryption or signature mechanism to prevent the execution of a different operating system or bootloader. The motivation of Marcin in getting Linux to run on such a phone was to ultimately be able to run the complete OsmocomBB software GSM stack inside the phone. OsmocomBB is a free software implementation of a GSM communication stack, lead by Harald Welte. For the moment, the OsmocomBB project uses phones based on the Calypso based-band processor, and only use the phone for the layer 1 (physical layer) of the communication, while the above layers (layer 2 and 3) are implemented in a PC that communicates with the phone over a serial port. Marcin would like to integrate everything inside the phone itself, in order to make the free software GSM stack completely autonomous and fully usable directly on the phone. Marcin decided to pick the SciPhoneDreamG2, a phone that uses the Mediatek 6235 processor, which has the great advantage of being an ARM9 processor, allowing to run a full-blown Linux, and having a datasheet available on the Web. The original operating system of the phone is Nucleus, on top of which the Chinese brand has added an interface that completely mimics Android but is not Android at all. Marcin described the work he did to understand where the UART port and JTAG port was connected (for this work, he mentioned the usage of the JTAG finder project, a software one can run on a micro-controller and that automatically finds which pins are the JTAG pins of a processor). Once he had access to a serial console and the JTAG, he dumped the memory, and started understanding how the boot process was working, and how the existing boot loader was initializing the DRAM. This work was completely done by disassembling the code, which required quite some effort, according to Marcin. Once this was done, he said that porting U-Boot only required creating a basic UART driver and a timer driver, and porting a basic Linux only required a similar UART driver and timer driver, but also an interrupt driver. Marcin and his colleague then went one in developing the other drivers, such as SD, USB, GPIOs and more, and they detailed some of the issues they faced and the time required for these different tasks. In the end, the project is not yet finished, since OsmocomBB does not run on the phone yet, but this is the next goal for Marcin and his colleague. In the end, it was a very interesting goal, detailing in an informative and amusing way an absolutely excellent reverse-engineering effort conducted by Marcin. I would strongly recommend watching the video of this talk.
Pin Control Subsystem Overview Linus Walleij
The last afternoon of ELC started with a talk from Linus Walleij from Linaro, Pin Control Subsystem Overview. Linus Walleij started by describing with lots of details how I/O pins are implemented from a hardware perspective. He first described a basic I/O pin, on which the software can just control the level. On top of this, he explained the hardware logic used to generate interrupts and wake-up events from I/O pins. And finally, he added that those I/O pins are nowadays commonly multiplexed since the SoC do not have enough pins to expose all their possible features, so a given pin can be used either for one function (say, one pin of a I2C bus) or another function (say, one pin of a parallel LCD interface) or as a general purpose I/O. Since this multiplexing is controlled by software, the code for the various ARM sub-architectures in the Linux kernel have each implemented their own little framework and API to solve that problem, and it’s up to each board file to set their I/O multiplexing settings. Unfortunately, since each ARM sub-architecture has its own implementation, there is no coherent API, and there is code duplication. Linus Walleij’s pin mux subsystem intends to solve that. It has already been merged in mainline, in the drivers/pinctrl directory, and a few ARM sub-architectures have started using it, with more to come in the near future, said Linus. Basically, the pinmux subsystem allows to describe which pins are available on the SoC, how they are grouped together in functions, and how drivers can select which function should be activated at an I/O multiplexing level. Of course, the pinmux subsystem detects conflicting usage of I/O, for example if two different drivers want to use the same pin with a different function. Linus also clarified how drivers for I/O pins block should be implemented in the kernel now. If what you have is a simple GPIO expander, then the driver for it should lie in drivers/gpio and it should use the gpio_chip structure. If this simple GPIO expander is also capable of generating interrupts, then the driver should still be in drivers/gpio, but in addition to the gpio_chip structure, it should also register an irq_chip structure. And finally, if instead this I/O pin controller supports multiplexing, then the driver for it should be implemented in drivers/pinctrl, and it should register into the GPIO subsystem (through the gpio_chip structure), into the IRQ subsystem (through the irq_chip structure) and into the pinmux subsystem (through the pinctrl_desc and other related structures). All in all, Linus’s presentation was a great talk, but I wished he would have put more details on the actual API and data structures: his description of the data structures through UML diagrams were a bit hard to follow.
For the last session of the day, I initially planned to attend Pintu Kummar’s talk on Controlling Linux Memory Fragmentation and Higher Order Allocation Failure: Analysis, Observations and Results, but this session was unfortunately canceled. Therefore, I joined my colleague Maxime Ripard and attended Lucas de Marchi talk about Managing Kernel Modules With kmod. Basically, about a year ago, Lennart Poettering, developer of the systemd new userspace init implementation for Linux, listed a set of topics that he wanted to see improved in Linux to make the initialization sequence perform better. Amongst them was the development of a userspace library to manage kernel modules (query information, insert and remove modules). The problem is that until now, the only way to load and remove modules was to call the modprobe, insmod or rmmod programs, which for each module load operation, required a costly sequence of fork/exec. Since udev tries to load up to 200-300 modules at startup (sometimes just to discover that the module is already loaded), this takes a significant amount of time. So Lucas de Marchi, who works at ProFUSION, decided to step up, and did the implementation of kmod. kmod is composed of a C library which implements the core logic of the module information query, module loading and module removal operation, supporting all the fine details that modprobe was supporting (such as dependency handling, module aliases and the configuration files in /etc/modprobe.d/ with options for modules, blacklisted modules). kmod also contains replacement programs for the insmod, lsmod, rmmod and modprobe programs, directly inside a single kmod binary, with symlinks pointing to it for the various commands. kmod is now a full replacement for the old module-init-tools, which has been marked as obsolete by his former maintainer, Jon Masters (who has joined the kmod project). Desktop distributions have started to pick up kmod (Arch Linux, Fedora, and Debian in experimental), as well as embedded Linux build systems. Lucas mentioned that Buildroot had the latest version of kmod, while OpenEmbedded had a slighly older version, and that he didn’t know about other build systems. In the end, this kmod project does not bring a lot of new features or innovations, but is a well-appreciated initiative to make module management better in Linux. What’s very impressive in the time frame in which the project was done: in about a year, the project got started, the development was done, and it is now a full replacement of the old solution, which has been marked deprecated. Great job!
Managing Kernel Modules With kmod, Lucas De Marchi
Finally, as every ELC, the conference was closed with a game involving all the attendees, and allowing to win nice prizes such as development boards, USB scopes, audio/video portable players (PMPs), and more. The game started with a set of geek questions (such as “Will the Linux kernel in version 3.3 have more or less than 15 millions lines of code ?”, or “Is the distance from the Earth to the Moon smaller or higher than 150.000 miles ?”), and then a rock/paper/scissors game, and finally a raffle. This closing game is always a nice way of ending ELC.
This year’s edition of the Android Builders Summit and the Embedded Linux Conference have been great, with lots of interesting technical talks, and lots of side discussions with various developers. Many thanks to the conference organizers and speakers!
Embedded Linux Conference Europe 2012
We hope that those five blog posts reporting some details about those conferences have been interesting to those who didn’t have the chance to attend, and we are definitely looking forward the next edition of the Embedded Linux Conference Europe, which will take place in Barcelona from November 5th to November 7th. Note that the call for papers has already been published. It’s time to think about what you’re doing in the embedded Linux world, and to propose a corresponding talk!