 As the summer is coming to an end, we finally managed to publish the videos we recorded during the last Embedded Linux Conference, held earlier this year in San Jose, California.
As the summer is coming to an end, we finally managed to publish the videos we recorded during the last Embedded Linux Conference, held earlier this year in San Jose, California.
This year, the Linux Foundation was only recording the audio of the talks, and we’ve been recording the video only for a few talks. Sorry to all the speakers that won’t be able to see their footage, but we were not able to attend (and record) all of the talks this year. Still, we include below the links to all the talks, slides and their audio recording, in order to cover all of this year’s schedule.
Our videos
Alan Ott
Signal 11 Software
USB and the Real World
Slides
Audio Recording
Video (49 minutes):
full HD (365M), 800×450 (224M)
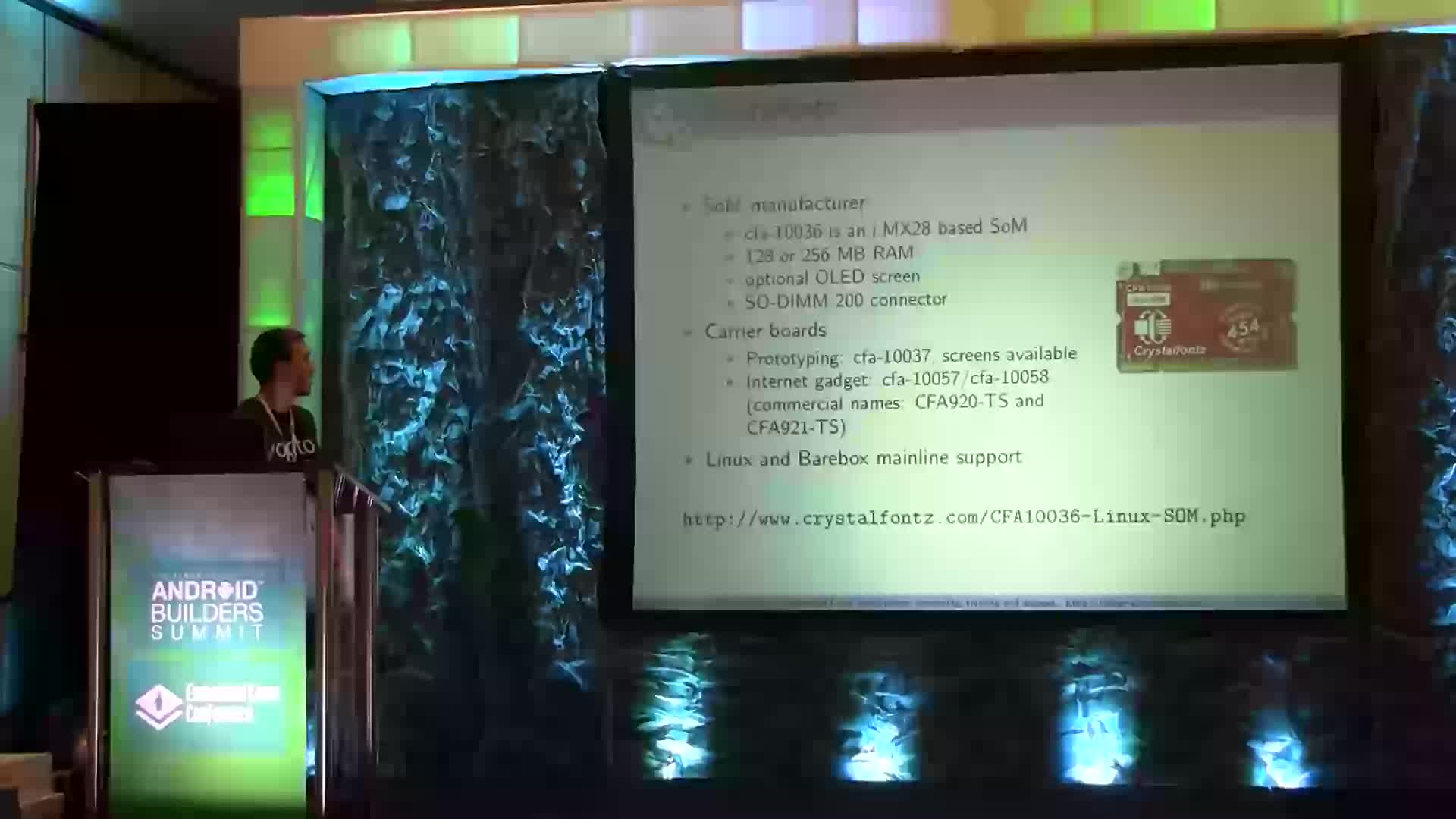
Alexandre Belloni
Bootlin
Using Yocto for Modules Manufacturers
Slides
Audio Recording
Video (56 minutes):
full HD (421M), 800×450 (224M)
David Anders, Matt Ranostay
CircuitCo, Intel
Hardware Debugging Tools, Sigrok: Using Logic to Debug Logic
Slides
Audio Recording
Video (42 minutes):
full HD (314M), 800×450 (223M)
David Anders, Matt Porter, Matt Ranostay, Karim Yaghmour
CircuitCo, Linaro, Intel, Opersys
Debugging – Panel Discussion
Audio Recording
Video (43 minutes):
full HD (322M), 800×450 (228M)
Gregory Clement
Bootlin
SMP Bring Up On ARM SOCs
Slides
Audio Recording
Video (48 minutes):
full HD (359M), 800×450 (253M)
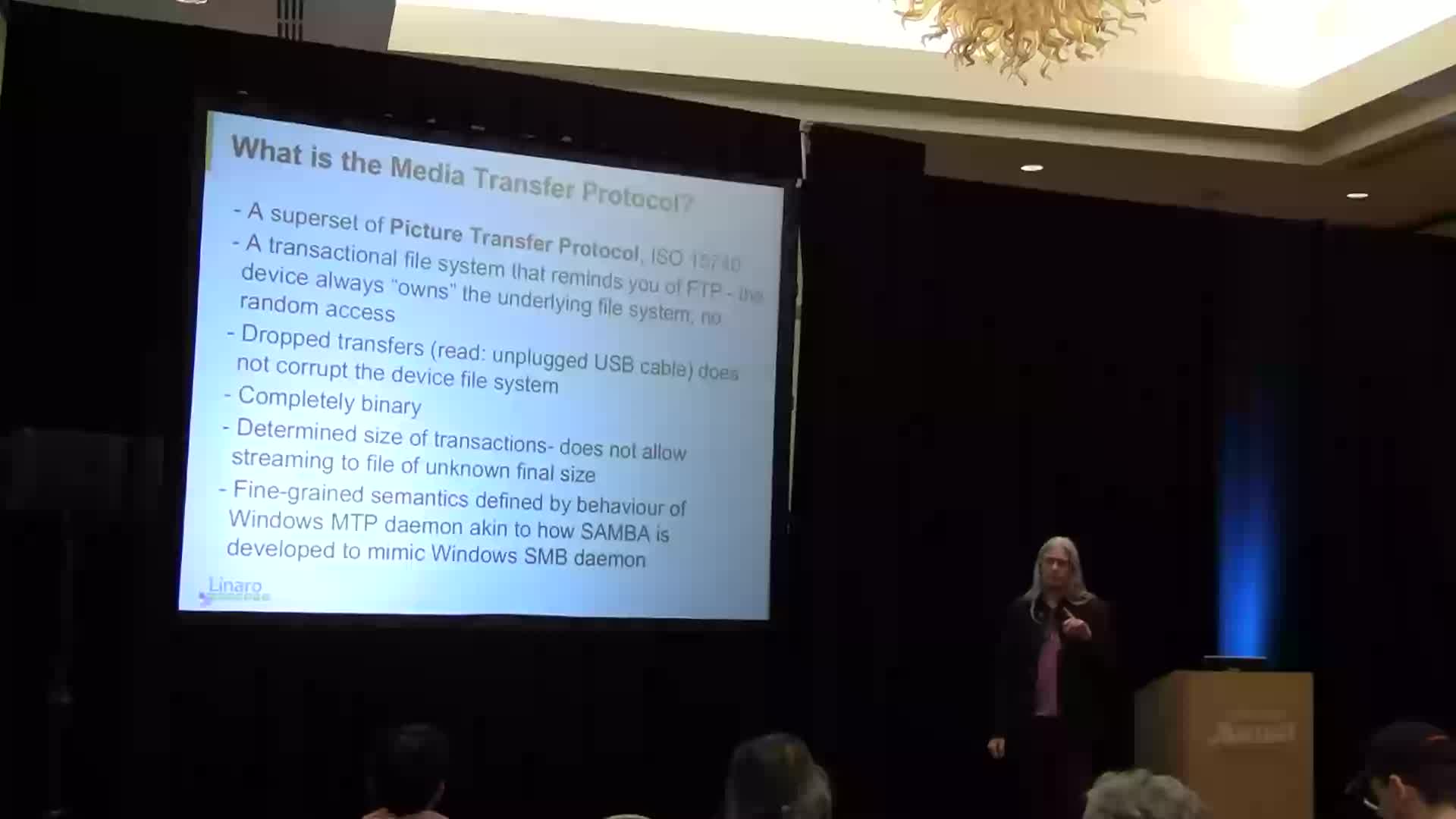
Linus Walleij
Linaro
Fear and Loathing in the Media Transfer Protocol
Slides
Audio Recording
Video (55 minutes):
full HD (414M), 800×450 (224M)
Martti Piirainen
Tieto
Productizing Telephony and Audio in a GNU/Linux (Sailfish OS) Smartphone
Slides
Audio Recording
Video (46 minutes):
full HD (343M), 800×450 (204M)
Matt Porter
Linaro
Debugging – Linux Kernel Testing
Audio Recording
Video (47 minutes):
full HD (357M), 800×450 (254M)
Matt Porter
Linaro
Kernel USB Gadget Configfs Interface
Slides
Audio Recording
Video (42 minutes):
full HD (317M), 800×450 (224M)
Maxime Ripard
Bootlin
Supporting a New ARM Platform: The Allwinner SoCs Example
Slides
Audio Recording
Video (48 minutes):
full HD (364M), 800×450 (203M)
Micheal E Anderson
The PTR Group, Inc.
Extending Linux using Arduinos
Slides
Audio Recording
Video (57 minutes):
full HD (430M), 800×450 (230M)
Michael Opdenacker
Bootlin
Update on Boot Time Reduction Techniques with Figures
Slides
Audio Recording
Video (45 minutes):
full HD (340M), 800×450 (198M)
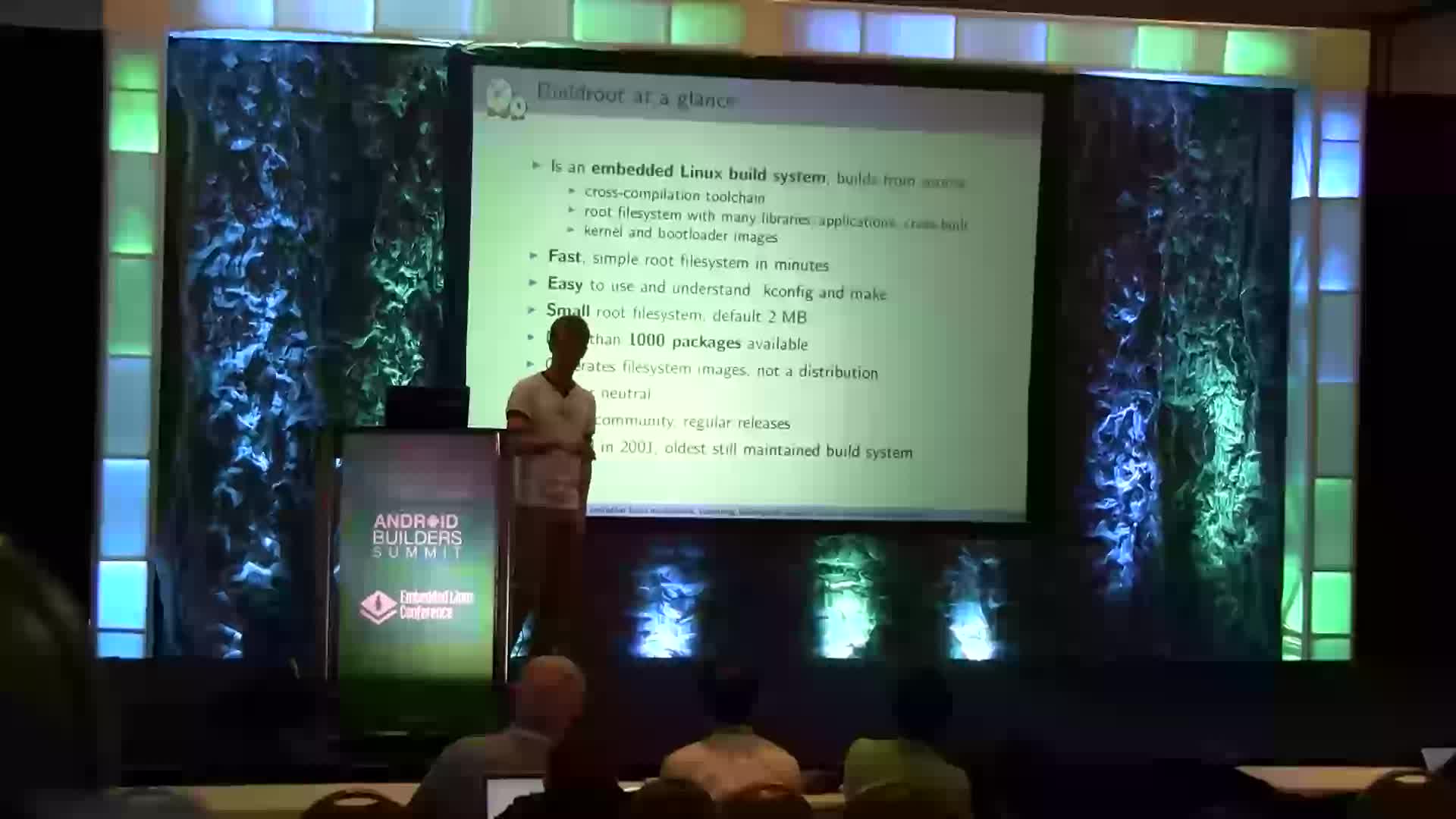
Thomas Petazzoni
Bootlin
Buildroot: What’s New?
Slides
Audio Recording
Video (52 minutes):
full HD (392M), 800×450 (278M)
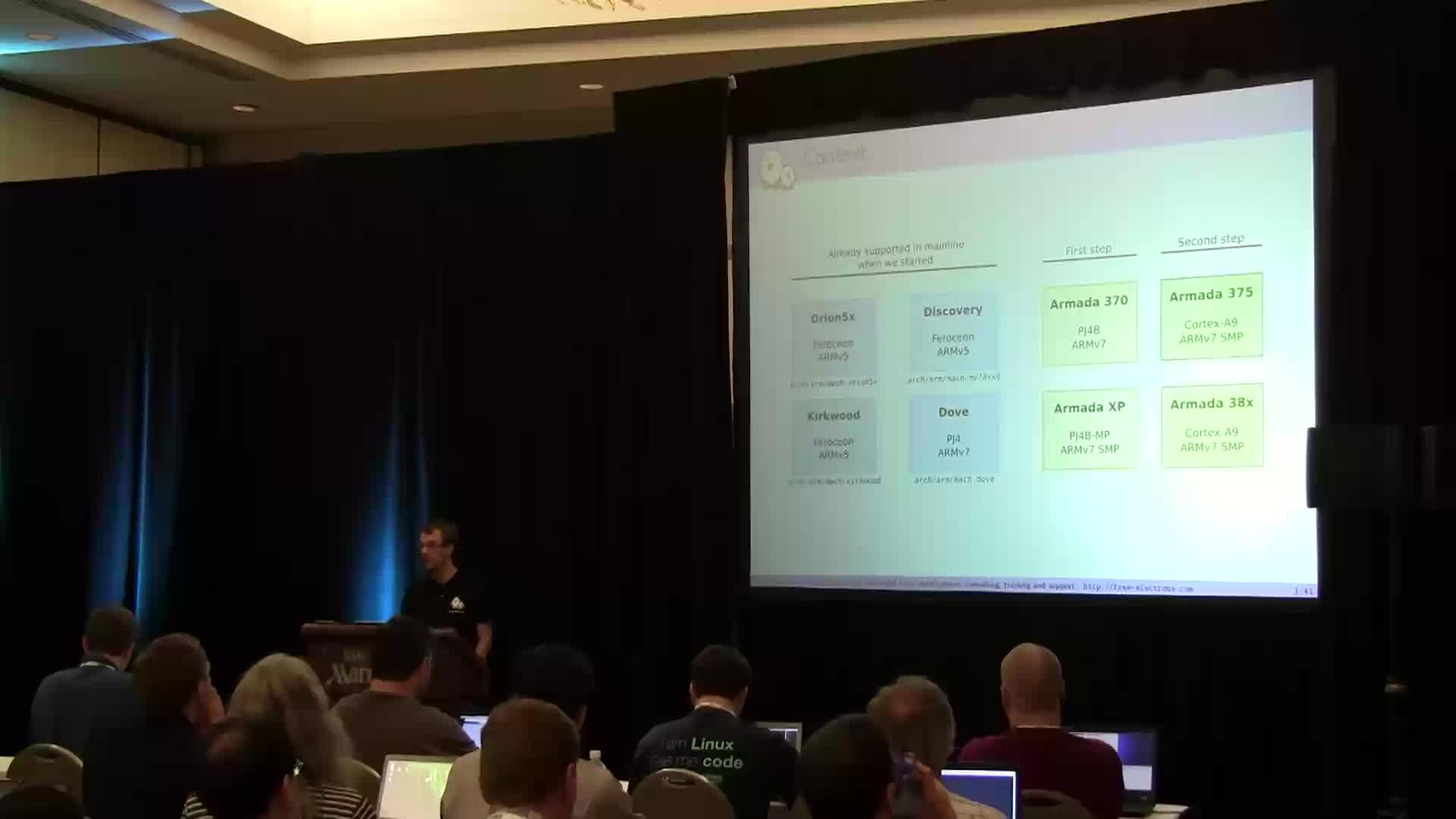
Thomas Petazzoni
Bootlin
Two Years of ARM SoC Support mainlining: Lessons Learned
Slides
Audio Recording
Video (52 minutes):
full HD (388M), 800×450 (221M)
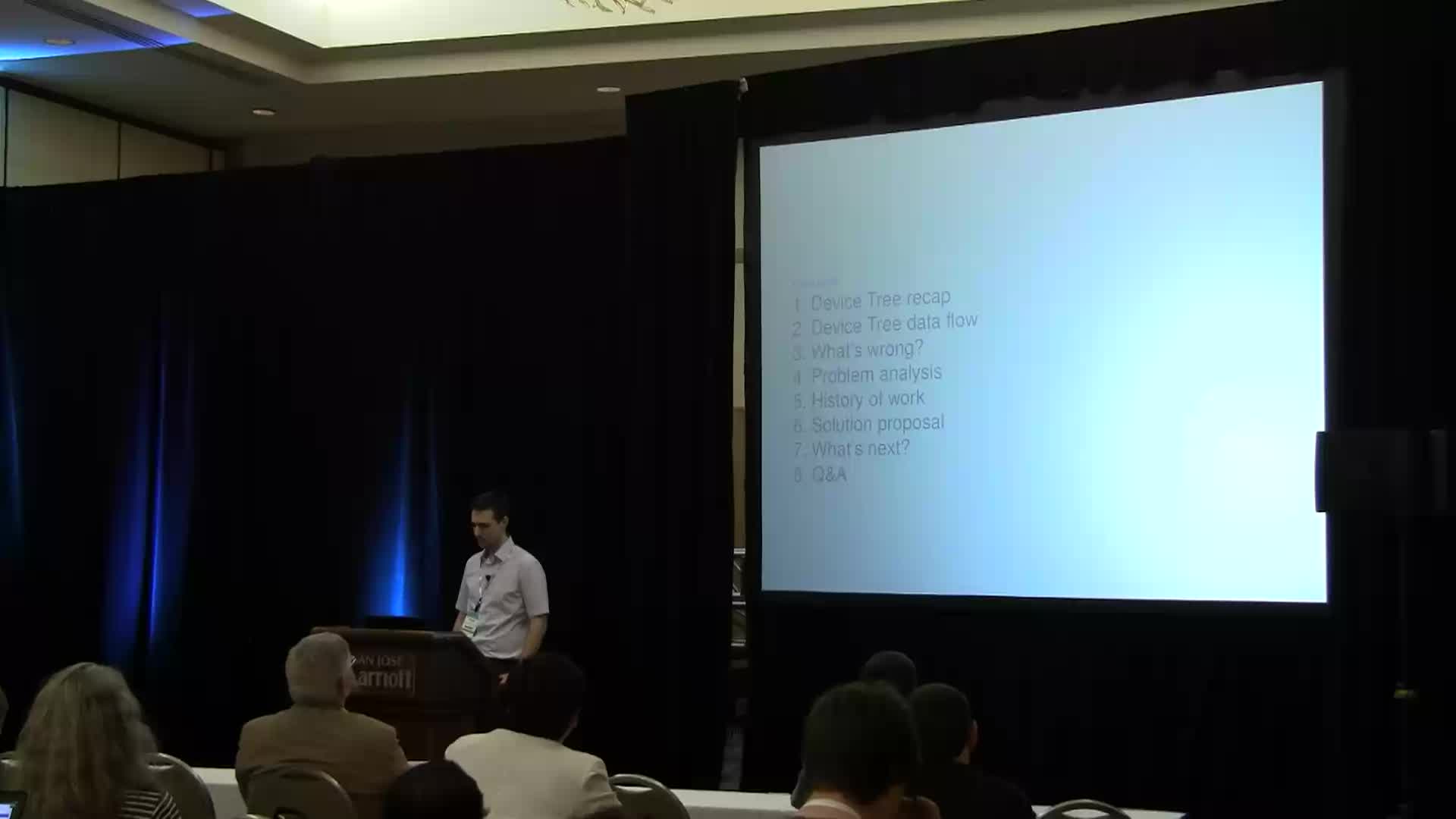
Tomasz Figa
Samsung R&D Institute
Trees need care: A Solution to Device Tree Validation Problem
Slides
Audio Recording
Video (50 minutes):
full HD (377M), 800×450 (234M)
Tristan Lelong
Adeneo Embedded
Linux Quickboot
Slides
Audio Recording
Video (54 minutes):
full HD (406M), 800×450 (288M)
Other talks
Adrian Perez de Castro
Igalia
Improving Performance Of A WebKit Port MIPS Platform
Slides
Audio Recording
Adrien Verge
Ecole Polytechnique Montreal
Hardware-Assisted Software Tracing
Slides
Audio Recording
Behan Webster
Converse in Code Inc.
LLVMLinux: Embracing the Dragon
Slides
Audio Recording
Belen Barros Pena
Intel’s Open Source Technology Center
Building Tools From the Outside In: Bringing User-Centered Design to Embedded Linux
Slides
Audio Recording
Bradley M. Kuhn
Software Freedom Conservancy
Collaborative GPL Enforcement Through Non-Profit Entities
Slides
Audio Recording
Joe Kontur
Panasonic
CE Workgroup (BoFs)
Audio Recording
Chase Maupin
Texas Instruments
Using Agile Development Practices For Kernel Development
Audio Recording
Chris Simmonds
2net
A Timeline For Embedded Linux
Audio Recording
David Anders, Tim Bird, Matt Porter, Benjamin Zores, Karim Yaghmour
CircuitCo, Sony Mobile, Linaro, Alcatel-Lucent, OperSys
Keynote Panel: IoT and the Role of Embedded Linux and Android
Audio Recording
David Greaves
Mer Project
The #qt/#wayland/#systemd/#btrfs-phone … the Jolla phone
Slides
Audio Recording
Denys Dmytriyenko
Texas Instruments
Qt5 & Yocto – adding SDK and easy app migration from Qt4
Slides
Audio Recording
Gabriel Huau
Adeneo Embedded
Hardware Accelerated Video Streaming with V4L2
Slides
Audio Recording
Geert Uytterhoeven
Glider bvba
Engaging Device Trees
Slides
Audio Recording
Hans Verkuil
Cisco Systems Norway
An Introduction to the Video4Linux Framework
Slides
Audio Recording
Hisao Munakata, Tsugikazu Shibata
Renesas Electronics, NEC
LTSI Project Update for 3.10 Kernel and Future Plan
Audio Recording
Insop Song
Gainspeed
Can A Board Bringing Up Be Less Painful, if with Yocto and Linux?
Slides
Audio Recording
Iyad Qumei
LG Electronics
webOS, An Openembedded Use Case
Slides
Audio Recording
Jeff Osier-Mixon
Intel Corporation
Yocto Project / OpenEmbedded BoF
Audio Recording
Josh Cartwright
Qualcomm Innovation Center
System Power Management Interface (SPMI)
Audio Recording
Khem Raj
Juniper Networks
(Tutorial) Some GCC Optimizations for Embedded Software
Slides
Audio Recording
Laurent Pinchart
Renesas Linux Kernel Team
Mastering the DMA and IOMMU APIs
Slides
Audio Recording
John ‘Warthog9’ Hawley, Nitin Kamble
Intel
Making a Splash: Digital Signage Powered by MinnowBoard and the Yocto Project
Slides
Audio Recording
Mark Brown
Linaro
What’s going on with SPI
Audio Recording
Mark Skarpness
Intel
Keynote: Scaling Android at the Speed of Mobility
Audio Recording
Marta Rybczynska
Kalray
Porting Linux to a New Architecture
Slides
Audio Recording
Michael Christofferson
Enea
User Space Drivers in Linux ? Pros, Cons, and Implementation Issues
Audio Recording
Michael E Anderson
The PTR Group, Inc.
How to Build a Linux-Based Robot
Slides
Audio Recording
Minchan Kim
LG Electronics
Volatile Ranges
Audio Recording
Tim Bird
Sony Mobile
(BoFs) QCOM SoC Mainlining
Audio Recording
Patrick Titiano
BayLibre
Use-Case Power Management Optimization: Identifying & Tracking Key Power Indicators
Slides
Audio Recording
Philip Balister
OpenSDR
Open-Source Tools for Software-Defined Radio on Multicore ARM+DSP
Slides
Audio Recording
Ricardo Salveti de Araujo
Ubuntu Touch low level stack
Ubuntu Touch Internals
Slides
Audio Recording
Thomas Petazzoni
Bootlin
Device Tree for Dummies
Slides
Audio Recording
Tim Bird
Sony Mobile
Keynote: The Paradox of embedded and Open Source
Slides
Audio Recording
Tom Zanussi
Intel’s Open Source Technology Center
MicroYocto and the ‘Internet of Tiny’
Slides
Audio Recording
Victor Rodriguez
Intel
Introducing Embedded Linux to Universities
Slides
Audio Recording
Vitaly Wool
Softprise Consulting OU
Linux for Microcontrollers: Spreading the Disease
Slides
Audio Recording
Wolfgang Mauerer
Siemens
Understanding the Embedded Linux Ecosystem with Codeface
Slides
Audio Recording
Yoshitake Kobayashi
Toshiba
Using Real-Time Patch with LTSI Kernel
Slides
Audio Recording
 The Kernel Recipes conference is holding its third edition next week in Paris, on September 25th and 26th. With speakers like Greg Kroah-Hartmann, Hans Peter Anvin, Martin Peres, Hans Verkuil or Jean Delvare and many others, it is going to be a very interesting kernel-oriented conference.
The Kernel Recipes conference is holding its third edition next week in Paris, on September 25th and 26th. With speakers like Greg Kroah-Hartmann, Hans Peter Anvin, Martin Peres, Hans Verkuil or Jean Delvare and many others, it is going to be a very interesting kernel-oriented conference.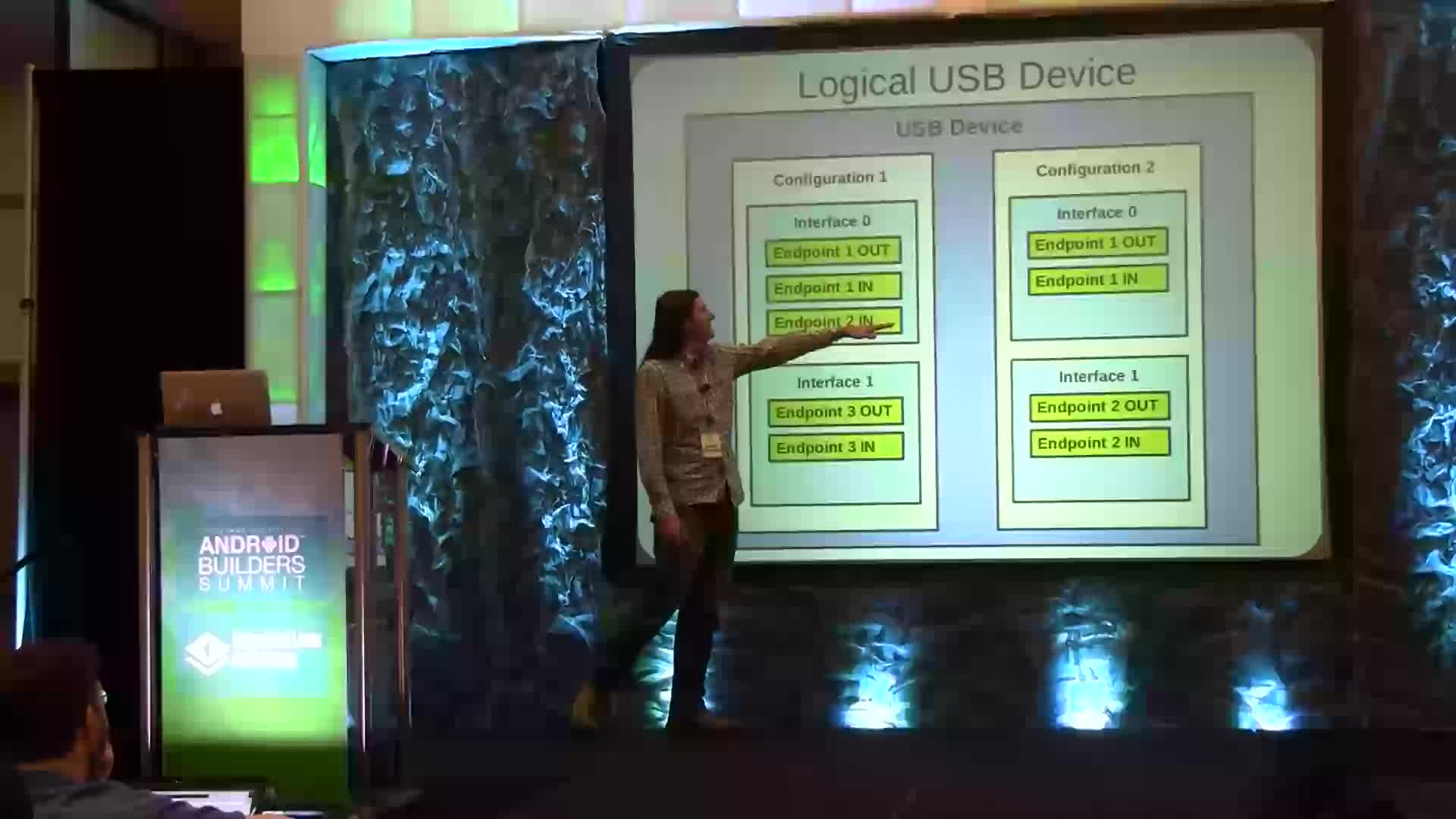








 It is organized by our partners
It is organized by our partners 